11.7: Características generales de las soluciones de órbita
- Page ID
- 126913
Es útil observar las características generales de las soluciones de las ecuaciones de movimiento dadas por la representación equivalente de un cuerpo del movimiento de dos cuerpos. Estas órbitas dependen del centro neto de la energía de masa\(E_{cm}.\) Hay cinco situaciones posibles dependiendo de la energía total del centro de masa\(E_{cm}\).
- \(\mathbf{E}_{cm}\mathbf{>0}:\)La trayectoria es hiperbólica y tiene una distancia mínima, pero no máxima. La distancia de aproximación más cercana se da cuando\(\dot{r}=0.\) En el punto de inflexión\(E_{cm}=U+\)\(\frac{l^{2}}{2\mu r^{2}}\)
- \(\mathbf{E}_{cm}\mathbf{=0}:\)Se puede demostrar que la órbita para este caso es parabólica.
- \(\mathbf{0>E}_{cm}\mathbf{>U}_{\min }:\)Para este caso la órbita equivalente tiene una distancia radial máxima y mínima a la que\(\dot{r}=0.\) En los puntos de inflexión el término de energía cinética radial es cero por lo que\(E_{cm}=U+\)\(\frac{l^{2}}{2\mu r^{2}}.\) Para la fuerza de ley cuadrada inversa atractiva la trayectoria es una elipse con el foco en el centro de atracción ( Figura\((11.8.1)\)), que es la Primera Ley de Kepler. Durante el tiempo que el radio va desde hacia\(r_{\max }\) y\(r_{\min }\) hacia atrás, el vector de radio gira a través de un ángulo\(\Delta \psi\) que viene dado por
\[\Delta \psi =2\int_{r_{\min }}^{r_{\max }}\frac{\pm ldr}{r^{2}\sqrt{2\mu \left( E_{cm}-U-\frac{l^{2}}{2\mu r^{2}}\right) }}\]
El camino general prescribe una forma de roseta que es una curva cerrada solo si\(\Delta \psi\) es una fracción racional de\(2\pi\).
- \(\mathbf{E}_{cm}\mathbf{=U}_{\min }:\)En este caso\(r\) es una constante que implica que el camino es circular ya que\[\dot{r}=\frac{dr}{dt}=\pm \sqrt{\frac{2}{\mu }\left( E_{cm}-U-\frac{l^{2}}{ 2\mu r^{2}}\right) }=0\]
- \(\mathbf{E}_{cm}\mathbf{<U}_{\min }:\)Para este caso la raíz cuadrada es imaginaria y no hay una solución real.
En general la órbita no está cerrada, y tales órbitas abiertas no se repiten. El teorema de Bertrand afirma que la fuerza central cuadrada inversa y el oscilador armónico lineal son las únicas dependencias radiales de la fuerza central que conducen a órbitas cerradas estables.
Ejemplo\(\PageIndex{1}\): Orbit equation of motion for a free body
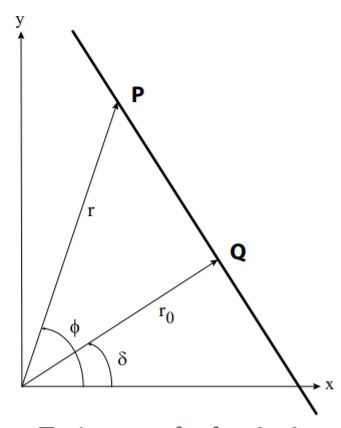
Es ilustrativo utilizar la ecuación de órbita diferencial\((11.5.1)\) para mostrar que un cuerpo en movimiento libre viaja en línea recta. Supongamos que una línea a través del origen\(O\) se cruza perpendicular a la trayectoria instantánea en el punto\(Q\) que tiene coordenadas polares\((r_{0},\phi )\) relativas al origen. El punto\(P,\) con coordenadas polares\((r,\phi ),\) se encuentra en una línea recta a través de\(Q\) eso es perpendicular a\(OQ\) si, y solo si,\(r\cos (\phi -\delta )=r_{0}.\) Dado que la fuerza es cero entonces la ecuación de órbita diferencial simplifica a
\[\frac{d^{2}u(\phi )}{d\phi ^{2}}+u(\phi )=0\notag\]
Una solución de esto es
\[u(\phi )=\frac{1}{r_{0}}\cos (\phi -\delta )\notag\]
donde\(r_{0}\) y\(\delta\) son constantes arbitrarias. Esto se puede reescribir como
\[r(\phi )=\frac{r_{0}}{\cos (\phi -\delta )} \notag\]
Esta es la ecuación de una línea recta en coordenadas polares como se ilustra en la figura adyacente. Esto demuestra que un cuerpo libre se mueve en línea recta si no hay fuerzas que actúen sobre el cuerpo.