
11.8: Cuadrado inverso, de dos cuerpos, fuerza central
- Page ID
- 126932
La interacción central conservadora más importante, de dos cuerpos, es la atractiva fuerza de ley inversa cuadrada, que se encuentra tanto en la atracción gravitacional como en la fuerza Coulomb. Esta fuerza se\(\mathbf{F(r)}\) puede escribir en la forma
\[\mathbf{F}(r)= \frac{k}{r^{2}}\widehat{\mathbf{r}}\label{11.52}\]
La constante de fuerza\(k\) se define como negativa para una fuerza atractiva y positiva para una fuerza repulsiva. En unidades S.I. la constante de fuerza\(k=-Gm_{1}m_{2}\) para la fuerza gravitacional y\(k=+\frac{q_{1}q_{2}}{4\pi \epsilon _{0}}\) para la fuerza Coulomb. Tenga en cuenta que esta convención de signos es lo contrario de lo que se usa en muchos libros que utilizan un signo negativo en la Ecuación\ ref {11.52} y asumen que\(k\) es positivo para una fuerza atractiva y negativo para una fuerza repulsiva.
La fuerza central conservadora, cuadrada inversa, de dos cuerpos, es única en el sentido de que las simetrías subyacentes conducen a cuatro leyes de conservación, todas las cuales son de importancia fundamental en la naturaleza.
- Conservación del momento angular: Como todas las fuerzas centrales conservadoras, la fuerza central de dos cuerpos cuadrados inversos conserva el momento angular como se demuestra en el capítulo\(11.3\).
- Conservación de la energía: Esta fuerza central conservadora se puede representar en términos de una energía potencial escalar\(U(r)\) dada por la ecuación\((11.1.2)\), donde para esta fuerza central
\[U(r)=\frac{k}{r}\label{11.53}\]
Además, la ecuación\((11.6.3)\) mostró que el centro de masa hamiltoniano se conserva, es decir,\(H_{cm}=E_{cm}\)
- Ley de Gauss: Para una fuerza central conservadora, de cuadrados inversos, de dos cuerpos, el flujo del campo de fuerza fuera de cualquier superficie cerrada es proporcional a la suma algebraica de las fuentes y sumideros de este campo que se encuentran dentro de la superficie cerrada. El flujo neto es independiente de la distribución de las fuentes y se hunde dentro de la superficie cerrada, así como del tamaño y forma de la superficie cerrada. Capítulo\(2.14.5\) lo probó para el campo de fuerza gravitacional.
- Órbitas cerradas: Dos cuerpos que interactúan a través de la fuerza central conservadora, de cuadrados inversos, de dos cuerpos, siguen órbitas cerradas (degeneradas) como lo establece el Teorema de Bertrand. La primera consecuencia de esta simetría es que las leyes del movimiento planetario de Kepler tienen órbitas estables y de un solo valor. La segunda consecuencia de esta simetría es la conservación del vector de excentricidad definido en la Ecuación\ ref {11.86}.
Los observables que dependen de la Ley de Gauss, o de órbitas planetarias cerradas, son extremadamente sensibles a la adición de incluso un minúsculo exponente incremental\(\xi\) a la dependencia radial\(r^{-\left( 2\pm \xi \right) }\) de la fuerza. La afirmación de que la fuerza central del cuadrado inverso, de dos cuerpos, conduce a órbitas cerradas se puede probar insertando la Ecuación\ ref {11.52} en la ecuación diferencial de órbita,
\[\frac{d^{2}u}{d\psi ^{2}}+u=-\frac{\mu }{l^{2}}\frac{1}{u^{2}}ku^{2}=-\frac{ \mu k}{l^{2}}\]
Usando la transformación
\[y\equiv u+\frac{\mu k}{l^{2}}\]
la ecuación de órbita se convierte
\[\frac{d^{2}y}{d\psi ^{2}}+y=0\]
Una solución de esta ecuación es
\[y=B\cos \left( \psi -\psi _{0}\right)\]
Por lo tanto
\[u=\frac{1}{r}=-\frac{\mu k}{l^{2}}\left[ 1+\epsilon \cos \left( \psi -\psi _{0}\right) \right]\label{11.58}\]
Esta es la ecuación de una sección cónica. Para una fuerza central atractiva, cuadrada inversa, la ecuación\ ref {11.58} es la ecuación para una elipse con el origen de\(r\) en uno de los focos de la elipse que tiene excentricidad\(\epsilon ,\) definida como\[\epsilon \equiv B\frac{l^{2}}{\mu k}\label{11.59}\]
La ecuación\ ref {11.58} es la ecuación polar de una sección cónica. La ecuación\ ref {11.58} también se puede derivar con el origen en un foco insertando el potencial de ley cuadrada inversa en la ecuación\((11.6.10)\) que da
\[\psi =\int \frac{\pm du}{\sqrt{\frac{2\mu E_{cm}}{l^{2}}+\frac{2\mu k}{l^{2}} u-u^{2}}}+\text{ constant}\label{11.60}\]
La solución de esto da
\[u=\frac{1}{r}=-\frac{\mu k}{l^{2}}\left[ 1+\sqrt{1+\frac{2E_{cm}l^{2}}{\mu k^{2}}}\cos \left( \psi -\psi _{0}\right) \right]\label{11.61}\]
Las ecuaciones\ ref {11.58} y\ ref {11.61} son idénticas si la excentricidad\(\epsilon\) es igual
\[\epsilon =\sqrt{1+\frac{2E_{cm}l^{2}}{\mu k^{2}}}\label{11.62}\]
El valor de\(\psi _{0}\) simplemente determina la orientación del eje mayor de la órbita equivalente. Sin pérdida de generalidad, es posible suponer que el ángulo\(\psi\) se mide con respecto al eje mayor de la órbita, es decir\(\psi _{0}=0\). Entonces la ecuación se puede escribir como
\[u=\frac{1}{r}=-\frac{\mu k}{l^{2}}\left[ 1+\epsilon \cos \left( \psi \right) \right] =-\frac{\mu k}{l^{2}}\left[ 1+\sqrt{1+\frac{2E_{cm}l^{2}}{\mu k^{2}}} \cos \left( \psi \right) \right]\label{11.63}\]
Esta es la ecuación de una sección cónica donde\(\epsilon\) está la excentricidad de la sección cónica. La sección cónica es una hipérbola si\(\epsilon >1\), parábola si\(\epsilon =1,\) elipse si\(\epsilon <1,\) y un círculo si\(\epsilon =0.\) Todas las órbitas equivalentes de un cuerpo para una fuerza de atracción tienen el origen de la fuerza en un foco de la sección cónica. Las órbitas dependen de si la fuerza es atractiva o repulsiva, del momento angular conservado\(l,\) y de la energía del centro de masa\(E_{cm}\).
Órbitas atadas
Las órbitas encuadernadas cerradas ocurren solo si se cumplen los siguientes requisitos.
- La fuerza debe ser atractiva,\((k<0)\) entonces la Ecuación\ ref {11.63} asegura que\(r\) sea positiva.
- Para una órbita elíptica cerrada. la excentricidad\(\epsilon <1\) de la representación equivalente de un solo cuerpo de la órbita implica que la energía total del centro de masa\(E_{cm}<0\), es decir, la órbita cerrada está ligada.
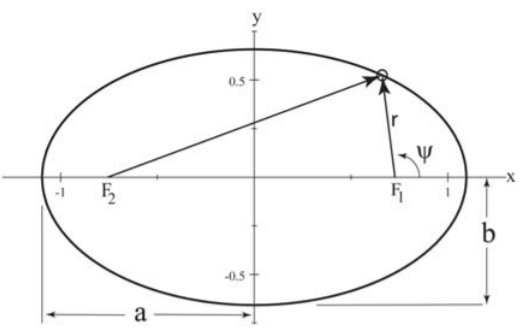
Las órbitas elípticas unidas tienen el centro de fuerza en un foco interior\(F_{1}\) de la representación elíptica de un solo cuerpo de la órbita como se muestra en la Figura\(\PageIndex{1}\).
El valor mínimo de la órbita\(r=r_{\min }\) ocurre\(\psi =0,\) cuando
\[r_{\min }=- \frac{l^{2}}{\mu k\left[ 1+\epsilon \right] }\label{11.64}\]
A esta distancia mínima se le llama periapsis 1.
La distancia máxima,\(r=r_{\max },\) que se llama apoapsis, ocurre cuando\(\psi =180^{o}\)
\[r_{\max }=- \frac{l^{2}}{\mu k\left[ 1-\epsilon \right] }\label{11.65}\]
Recuerde que ya que\(k<0\) para órbitas encuadernadas, los signos negativos en las ecuaciones\ ref {11.64} y\ ref {11.65} conducen a\(r>0\). La órbita más encuadernada es un círculo\(\epsilon =0\) que tiene lo que implica eso\(E_{cm}=-\frac{\mu k^{2}}{l^{2}}\).
La forma de la órbita elíptica también se puede describir con respecto al centro de la órbita equivalente elíptica derivando las longitudes del semieje mayor\(a\) y el semieje menor que\(b\) se muestran en la Figura\(\PageIndex{1}\). \[\begin{align} a &=&\frac{1}{2}\left( r_{\min }+r_{\max }\right) =\frac{1}{2}\left( \frac{ l^{2}}{\mu k\left[ 1+\epsilon \right] }+\frac{l^{2}}{\mu k\left[ 1-\epsilon \right] }\right) =\frac{l^{2}}{\mu k\left[ 1-\epsilon ^{2}\right] }\label{11.66} \\ b &=&a\sqrt{1-\epsilon ^{2}}=\frac{l^{2}}{\mu k\sqrt{[1-\epsilon ^{2}]}}\label{11.67} \end{align}\]
Recuerde que la órbita elíptica límite prevista corresponde a la representación equivalente de un cuerpo para el movimiento de dos cuerpos como se ilustra en la Figura\((11.2.2)\). Esto puede transformarse en las trayectorias espaciales individuales de cada uno de los dos cuerpos en un marco inercial.
Las leyes de Kepler para el movimiento planetario atado
Las tres leyes del movimiento de Kepler se aplican al movimiento de dos cuerpos en una órbita ligada debido a la atractiva fuerza gravitacional para la cual\(k=-Gm_{1}m_{2}\).
- Cada planeta se mueve en una órbita elíptica con el sol en un foco
- El vector de radio, dibujado del sol a un planeta, describe áreas iguales en tiempos iguales
- El cuadrado del periodo de revolución alrededor del sol es proporcional al cubo del eje mayor de la órbita.
Dos cuerpos que interactúan a través de la fuerza gravitacional, que es una fuerza central conservadora, cuadrada inversa, de dos cuerpos, se manejan mejor usando la representación orbital equivalente. La primera y segunda leyes fueron probadas en capítulos\(11.8\) y\(11.3\). Es decir, la segunda ley equivale a la afirmación de que se conserva el momento angular. La tercera ley se puede derivar utilizando el hecho de que el área de una elipse es
\[A=\pi ab=\pi a^{2} \sqrt{1-\epsilon ^{2}}=\frac{\pi l}{\sqrt{-\mu k}}a^{\frac{3}{2}}\]
Ecuaciones\((11.3.7)\) y\((11.3.8)\) dan que la tasa de cambio del área barrida por el vector de radio es
\[\frac{dA}{dt}=\frac{1}{2}r^{2}\dot{\psi}=\frac{l}{2\mu }\]
Por lo tanto, el período para una revolución\(\tau\) viene dado por el tiempo para barrer una elipse completa
\[\tau =\frac{A}{\left( \frac{dA}{dt}\right) }=2\pi \left( \frac{\mu }{-k} \right) ^{\frac{1}{2}}a^{\frac{3}{2}}\]
Esto lleva a la\(3^{rd}\) ley de Kepler\[\tau ^{2}=4\pi ^{2}\frac{\mu }{-k}a^{3}\label{11.71}\]
Las órbitas ligadas ocurren solo para fuerzas atractivas para las cuales la constante de fuerza\(k\) es negativa, y así cancelan el signo negativo en la Ecuación\ ref {11.71}. Por ejemplo, para la fuerza gravitacional\(k=-Gm_{1}m_{2}\).
Tenga en cuenta que la masa reducida\(\mu =\frac{m_{1}m_{2}}{m_{1}+m_{2}}\) ocurre en la\(3^{rd}\) ley de Kepler. Es decir, la tercera ley de Kepler se puede escribir en términos de las masas reales de los cuerpos a ser
\[\tau ^{2}=\frac{4\pi ^{2}}{G\left( m_{1}+m_{2}\right) }a^{3}\label{11.72}\]
Al relacionar los periodos relativos de los diferentes planetas Kepler hizo la aproximación de que la masa del planeta\(m_{1}\) es despreciable en relación con la masa del sol\(m_{2}.\)
La excentricidad de los planetas mayores va desde\(\epsilon =0.2056\) para Mercurio, hasta\(\epsilon =0.0068\) para Venus. La Tierra tiene una excentricidad de\(\epsilon =0.0167\) con\(r_{\min }=91\cdot 10^{6\text{ }}\) millas y\(r_{\max }=95\cdot 10^{6}\) millas. Por otro lado,\(\epsilon =0.967\) para el cometa Halley, es decir, el radio vector va de\(0.6\) a\(18\) veces el radio de la órbita de la Tierra.
La energía de órbita se puede derivar sustituyendo la excentricidad, dada por la Ecuación\ ref {11.62}, en la longitud del eje semi-mayor\(a,\) dada por la Ecuación\ ref {11.66}, que conduce a la energía del centro de masa de
\[E_{cm}=-\frac{k}{2a}\]
Sin embargo, el hamiltoniano, dado por la ecuación\((11.6.3)\), implica que\(E_{cm}\) es
\[E_{cm}=\frac{1}{2}\mu v^{2}+\left( -\frac{k}{r}\right) =-\frac{k}{2a}\]
Para el caso simple de una órbita circular,\(a=r\) entonces la velocidad\(v\) es igual\[v=\sqrt{\frac{k}{\mu r}}\]
Para una órbita circular, el arrastre sobre un satélite disminuye la energía total resultando en una disminución en el radio de la órbita y un aumento concomitante de la velocidad. Es decir, cuando se disminuye el radio de la órbita, parte de la ganancia en energía potencial da cuenta del trabajo realizado contra el arrastre, y la parte restante va hacia el aumento de la energía cinética. También hay que señalar que, como predice el Teorema del Virial, la energía cinética siempre es la mitad de la energía potencial para la fuerza de ley cuadrada inversa.
Órbitas no enlazadas
Las atractivas fuerzas centrales inverso-cuadradas conducen a órbitas hiperbólicas\(\epsilon >1\) para las cuales\(E_{cm}>0\), es decir, la órbita está desligada. Además, las órbitas siempre están desatadas por una fuerza repulsiva ya que\(U=\frac{ k}{r}\) es positiva como lo es la energía cinética\(T_{cm}\), así\(E_{cm}=T_{cm}+U_{cm}>0\). La ecuación de órbita radial para una fuerza atractiva o repulsiva es
\[r=- \frac{l^{2}}{\mu k\left[ 1+\epsilon \cos \psi \right] }\]
Porque una fuerza repulsiva\(k\) es positiva y\(l^{2}\) siempre es positiva. Por lo tanto para asegurar que\(r\) permanezcan positivos el término de paréntesis debe ser negativo. Eso es
\[\left[ 1+\epsilon \cos \psi \right] <0\hspace{1in}k>0\]
Para que una fuerza atractiva\(k\) sea negativa y como\(l^{2}\) es positiva entonces el término de paréntesis debe ser positivo para asegurar que\(r\) sea positivo. Es decir,\[\left[ 1+\epsilon \cos \psi \right] >0\hspace{1in}k<0\]
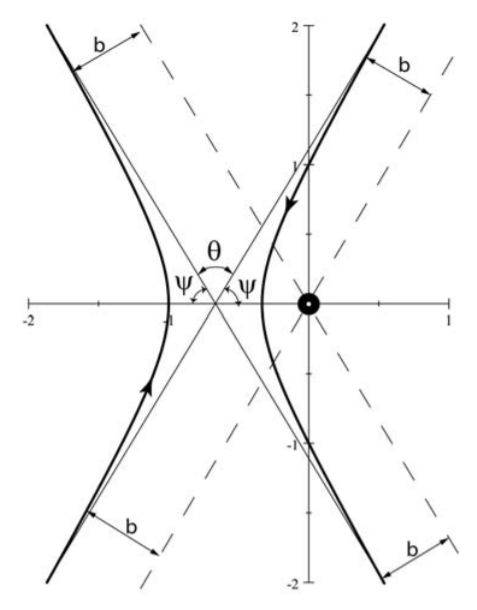
La figura\(\PageIndex{2}\) muestra ambas ramas de la hipérbola para un ángulo dado\(\psi\) para las órbitas equivalentes de dos cuerpos donde el centro de fuerza está en el origen. Para una fuerza atractiva,\(k<0,\) el centro de fuerza está en el foco interior de la hipérbola, mientras que para una fuerza repulsiva el centro de fuerza está en el foco exterior. Para un valor dado de\(\left\vert \psi \right\vert\) las asíntotas de las órbitas ambas son desplazadas por el mismo parámetro\(b\) de impacto desde líneas paralelas que pasan por el centro de fuerza. El ángulo de dispersión, entre la dirección de salida del cuerpo disperso y la dirección incidente, se designa para ser el\(\theta ,\) que está relacionado con el ángulo\(\psi\) por\(\theta =180^{\circ }-2\psi\).
Vector de excentricidad
Dos cuerpos que interactúan a través de una fuerza central conservadora de dos cuerpos tienen dos integrales invariantes de primer orden, a saber, la conservación de energía y la conservación del momento angular. Para el caso especial de la ley del cuadrado inverso, existe una tercera invariante del movimiento, al que Hamilton llamó el vector de excentricidad 2, que define inequívocamente la orientación y dirección del eje mayor de la órbita elíptica. Se demostrará que el momento angular más el vector de excentricidad definen completamente el plano y la orientación de la órbita para una fuerza central conservadora de la ley del cuadrado inverso.
La segunda ley de Newton para una fuerza central se puede escribir en la forma
\[\mathbf{ \dot{p}=}f(r)\mathbf{\hat{r}}\]
Tenga en cuenta que el momento angular\(\mathbf{L}=\mathbf{r\times p}\) se conserva para una fuerza central, es decir\(\mathbf{\dot{L}}=0\). Por lo tanto, la derivada de tiempo del producto se\(\mathbf{p\times L}\) reduce a
\[\frac{d}{dt}\left( \mathbf{p\times L}\right) \mathbf{=\dot{p}\times L=}f(r) \mathbf{\hat{r}\times }\left( \mathbf{r\times }\mu \mathbf{\dot{r}}\right) =f(r)\frac{\mu }{r}\left[ \mathbf{r}\left( \mathbf{r\cdot \dot{r}}\right) -r^{2}\mathbf{\dot{r}}\right]\label{11.80}\]
Esto puede simplificarse usando el hecho de que
\[\mathbf{r\cdot \dot{r}=}\frac{1}{2}\frac{d}{dt}\left( \mathbf{r\cdot r} \right) =r\dot{r}\]
por lo tanto
\[f(r)\frac{\mu }{r}\left[ \mathbf{r}\left( \mathbf{r\cdot \dot{r}}\right) -r^{2}\mathbf{\dot{r}}\right] =-\mu f(r)r^{2}\left[ \frac{\mathbf{\dot{r}}}{r }-\frac{\mathbf{r}\dot{r}}{r^{2}}\right] =-\mu f(r)r^{2}\frac{d}{dt}\left( \frac{\mathbf{r}}{r}\right)\]
Esto permite que la Ecuación\ ref {11.80} se reduzca a
\[\frac{d}{dt}\left( \mathbf{p\times L}\right) \mathbf{=}-\mu f(r)r^{2}\frac{d }{dt}\left( \frac{\mathbf{r}}{r}\right)\label{11.83}\]
Supongamos el caso especial de la ley del cuadrado inverso, Ecuación\ ref {11.52}, entonces la fuerza central Ecuación\ ref {11.83} se reduce a
\[\frac{d}{dt}\left( \mathbf{p\times L}\right) \mathbf{=-}\frac{d}{dt}\left( \mu k\mathbf{\hat{r}}\right)\label{11.84}\]
o
\[\frac{d}{dt}\left[ \left( \mathbf{p\times L}\right) \mathbf{+}\left( \mu k \mathbf{\hat{r}}\right) \right] =0\label{11.85}\]
Definir el vector de excentricidad\(\mathbf{A}\) como
\[\mathbf{A\equiv }\left( \mathbf{p\times L}\right) \mathbf{+}\left( \mu k \mathbf{\hat{r}}\right)\label{11.86}\]
entonces la Ecuación\ ref {11.85} corresponde a
\[\frac{d\mathbf{A}}{dt}=0\label{11.87}\]
Esto es una afirmación de que el vector de excentricidad\(A\) es una constante de movimiento para una fuerza central de cuadrado inverso.
La definición del vector de excentricidad\(\mathbf{A}\) y del vector de momento angular\(\mathbf{L}\) implica un producto escalar cero,
\[\mathbf{A\cdot L=}0\label{11.88}\]
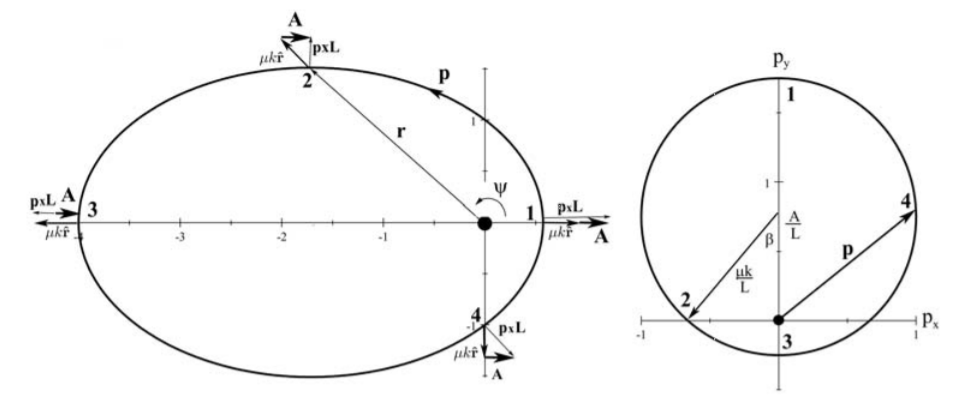
Así, el vector de excentricidad\(\mathbf{A}\) y el momento angular\(\mathbf{L}\) son mutuamente perpendiculares,\(\mathbf{A}\) es decir, está en el plano de la órbita mientras que\(\mathbf{L}\) es perpendicular al plano de la órbita. El vector de excentricidad\(\mathbf{A}\), siempre apunta a lo largo del eje mayor de la elipse desde el foco hasta la periapsis como se ilustra en el lado izquierdo en la Figura\(\PageIndex{3}\). Como consecuencia, los dos vectores ortogonales\(\mathbf{ A}\) y definen\(\mathbf{L}\) completamente el plano de la órbita, más la orientación del eje mayor de la órbita Kepler, en este plano. Los tres vectores\(\mathbf{A}\),\(\mathbf{p\times L}\), y\(\left( \mu k\mathbf{\hat{r}} \right)\) obedecen la regla del triángulo como se ilustra en el lado izquierdo de la Figura\(\PageIndex{3}\).
Hamilton señaló la conexión directa entre el vector de excentricidad\(\mathbf{A}\) y la excentricidad\(\epsilon\) de la órbita de la sección cónica. Esto se puede demostrar considerando el producto escalar
\[\mathbf{A\cdot r=}Ar\cos \psi =\mathbf{r\cdot }\left( \mathbf{p\times L} \right) +\mu kr\label{11.89}\]
Tenga en cuenta que el producto escalar triple se puede permutar para dar
\[\mathbf{r\cdot }\left( \mathbf{p\times L}\right) =\left( \mathbf{r}\times \mathbf{p}\right) \mathbf{\cdot L=L\cdot L=}l^{2}\label{11.90}\]
Insertar Ecuación\ ref {11.90} en\ ref {11.89} da\[\frac{1}{r}=-\frac{\mu k}{l^{2}}\left( 1-\frac{A}{\mu k}\cos \psi \right)\label{11.91}\]
Tenga en cuenta que las ecuaciones\ ref {11.63} y\ ref {11.91} son idénticas si\(\psi _{0}=0\). Esto implica que la excentricidad\(\epsilon\) y\(A\) están relacionados por
\[\epsilon =-\frac{A}{\mu k}\label{11.92}\]
donde\(k\) se define como negativo para una fuerza atractiva. La relación entre la excentricidad y la energía total del centro de masa se puede utilizar para reescribir la ecuación\ ref {11.62} en la forma\[A^{2}=\mu ^{2}k^{2}+2\mu E_{cm}l^{2}\label{11.93}\]
La combinación del vector de excentricidad\(\mathbf{A}\) y el vector de momento angular especifica\(\mathbf{L}\) completamente la órbita para una fuerza central de ley cuadrada inversa. La trayectoria se encuentra en el plano perpendicular al vector de momento angular\(\mathbf{L}\), mientras que la excentricidad, más la orientación de la órbita, ambas están definidas por el vector de excentricidad\(\mathbf{A}\). El vector de excentricidad y el vector de momento angular tienen cada uno tres coordenadas independientes, es decir, estas dos invariantes vectoriales proporcionan seis restricciones, mientras que la energía invariante escalar\(E,\) agrega una restricción adicional. La ubicación exacta de la partícula que se mueve a lo largo de la trayectoria no está definida y, por lo tanto, solo hay cinco coordenadas independientes gobernadas por las siete restricciones anteriores. Así, el vector de excentricidad, el momento angular y la energía del centro de masa están relacionados por las dos ecuaciones\ ref {11.88} y\ ref {11.93}.
El teorema de Noether establece que cada ley de conservación es una manifestación de una simetría subyacente. La identificación de la simetría subyacente responsable de la conservación del vector de excentricidad\(\mathbf{A}\) se dilucidó usando la Ecuación\ ref {11.86} para dar
\[\left( \mu k\mathbf{\hat{r}}\right) =\mathbf{A-}\left( \mathbf{p\times L} \right)\]Toma el producto escalar
\[\left( \mu k\mathbf{\hat{r}}\right) \cdot \left( \mu k\mathbf{\hat{r}} \right) =\left( \mu k\right) ^{2}=p^{2}L^{2}+A^{2}-2L\cdot \left( \mathbf{ p\times L}\right)\]
Elija el momento angular para estar a lo largo del\(z\) -eje, es decir,\(\mathbf{L=}l \mathbf{\hat{z}}\), y, ya que\(\mathbf{p}\) y\(\mathbf{A}\) son perpendiculares a\(\mathbf{L}\), entonces\(\mathbf{p}\) y\(\mathbf{A}\) están en el\(\mathbf{\hat{x}-\hat{y}}\) plano. Supongamos que el eje semimajor de la órbita elíptica está a lo largo del\(\mathbf{x}\) eje -eje, entonces el lugar del vector de impulso en una hodografía de momento tiene la ecuación
\[p_{x}^{2}+\left( p_{y}-\frac{A}{L}\right) ^{2}=\left( \frac{\mu k}{L}\right) ^{2}\label{11.96}\]
La ecuación\ ref {11.96} implica que el locus del vector de impulso es un círculo de radio\(\left\vert \frac{\mu k}{L}\right\vert\) con el centro desplazado del origen en coordenadas\(\left( 0,\frac{A}{L}\right)\) como lo muestra la hodografía de impulso en el lado derecho de una Figura\(\PageIndex{3}\). El ángulo\(\beta\) y la excentricidad\(\epsilon\) están relacionados por,
\[\cos \beta =-\frac{A/L}{\mu k/L}=-\frac{A}{\mu k}=\epsilon\]
La órbita circular se centra en el origen para\(\epsilon =-\frac{A}{\mu k} =0\), y así la magnitud\(\left\vert \mathbf{p}\right\vert\) es una constante alrededor de toda la trayectoria.
La fuerza cuadrada inversa, central, de dos cuerpos, es inusual ya que conduce a órbitas estables cerradas debido a que las frecuencias radial y angular son degeneradas, es decir,\(\omega _{r}=\omega _{\psi }.\) en el espacio de momento, el locus del vector de momento lineal\(\mathbf{p}\) es un círculo perfecto que es la simetría subyacente responsable tanto por el hecho de que las órbitas están cerradas, como por la invarianza del vector de excentricidad. Matemáticamente esta simetría para el problema Kepler corresponde a que el cuerpo se mueve libremente en el límite de una esfera de cuatro dimensiones en el espacio y el momento. La invarianza del vector de excentricidad es una manifestación de la propiedad especial del cuadrado inverso, fuerza central bajo ciertas rotaciones en este espacio cuatridimensional; esta\(O(4)\) simetría es un ejemplo de simetría oculta.
1 El término griego apsis se refiere a los puntos de mayor o menor distancia de aproximación para un cuerpo en órbita desde uno de los focos de la órbita elíptica. El término periapsis o pericentro ambos se utilizan para designar la distancia más cercana de abordaje, mientras que apoapsis o apocentro se utilizan para designar la distancia más lejana de abordaje. Se prefiere adjuntar los términos “perí-” y “apo-” al término general “-apsis” a tener diferentes nombres para cada objeto del sistema solar. Por ejemplo, los términos de uso frecuente son “-helion” para órbitas del sol, “-gee” para órbitas alrededor de la tierra y “-cynthion” para órbitas alrededor de la luna.
2 La simetría subyacente al vector de excentricidad es menos intuitiva que las invariantes de energía o momento angular, lo que lleva a ser descubierto independientemente varias veces durante los últimos tres siglos. Jakob Hermann fue el primero en identificar este invariante para el caso especial de la fuerza central de cuadrado inverso. Bernoulli generalizó su prueba en 1710. Laplace derivó lo invariante a finales del siglo XVIII utilizando la mecánica analítica. Hamilton derivó la conexión entre lo invariante y la excentricidad de la órbita. Gibbs derivó la invariante mediante análisis vectorial. Runge publicó la derivación de Gibb en su libro de texto al que Lenz hizo referencia en un artículo de 1924 sobre el modelo cuántico del átomo de hidrógeno. Goldstein nombró a este invariante el “vector Laplace-Runge-Lenz”, mientras que otros lo han llamado el “vector Runge-Lenz” o el “vector Lenz”. Este libro utiliza el nombre más intuitivo de Hamilton de “vector de excentricidad”.