
11.11: El problema de los tres cuerpos
- Page ID
- 126895
Dos cuerpos que interactúan a través de fuerzas centrales conservadoras pueden resolverse analíticamente para la ley cuadrada inversa y las dependencias radiales de la ley Hooke como ya se discutió. Las fuerzas centrales que tienen otras dependencias radiales para las ecuaciones de movimiento pueden no ser expresables en términos de funciones simples, sin embargo el movimiento siempre se puede dar en términos de una integral. Para un sistema gravitacional que comprende\(n\geq 3\) cuerpos que interactúan a través de la fuerza gravitacional central de dos cuerpos, entonces las ecuaciones de movimiento se pueden escribir como
\[m_{j}\mathbf{ \ddot{q}=G}\sum_{\substack{ k \\ k\neq j}}^{n}m_{j}m_{k}\frac{\left( \mathbf{q}_{k}-\mathbf{q}_{j}\right) }{\left\vert \mathbf{q}_{k}-\mathbf{q} _{j}\right\vert ^{3}} \tag{$j=1,2,..,n$}\]
Incluso cuando todos los\(n\) cuerpos interactúan a través de fuerzas centrales de dos cuerpos, el problema suele ser insoluble en términos de integrales analíticas conocidas. Newton planteó por primera vez la dificultad del problema de Kepler de tres cuerpos que ha sido ampliamente estudiado por matemáticos y físicos. No se ha encontrado ninguna solución integral analítica general conocida. Cada cuerpo para el sistema\(n\) -body tiene\(6\) grados de libertad, es decir,\(3\) para la posición y\(3\) para el impulso. El movimiento del centro de masa puede ser factorizado, por lo tanto, el sistema de centro de masa para el sistema\(n\) -cuerpo tiene\(6n-10\) grados de libertad después de la resta de\(3\) grados para la ubicación del centro de masa,\(3\) para el momento lineal del centro de masa,\(3\) para la rotación de el centro de masa, y\(1\) para la energía total del sistema. Así pues,\(n=2\) hay\(12-10=2\) grados de libertad para el sistema de dos cuerpos para el que toma ser el enfoque Kepler\(\mathbf{r}\) y\(\theta .\) Para\(n=3\) hay\(8\) grados de libertad en el sistema de centro de masa que hay que determinar.
Las soluciones numéricas al problema de los tres cuerpos se pueden obtener utilizando métodos sucesivos de aproximación o perturbación en cálculos informáticos. El problema puede simplificarse restringiendo el movimiento a cualquiera de las siguientes dos aproximaciones:
1) Aproximación planar
Esta aproximación supone que las tres masas se mueven en un mismo plano, es decir, se reduce el número de grados de libertad\(8\) a partir de\(6\) lo cual simplifica la solución numérica.
2) Aproximación restringida de tres cuerpos
La aproximación restringida de tres cuerpos supone que dos de las masas son grandes y unidas mientras que la tercera masa es insignificante de tal manera que la perturbación del movimiento de los dos más grandes por el tercer cuerpo es insignificante. Esta aproximación esencialmente reduce el sistema a un problema de dos cuerpos con el fin de calcular los campos gravitacionales que actúan sobre la tercera masa mucho más ligera.
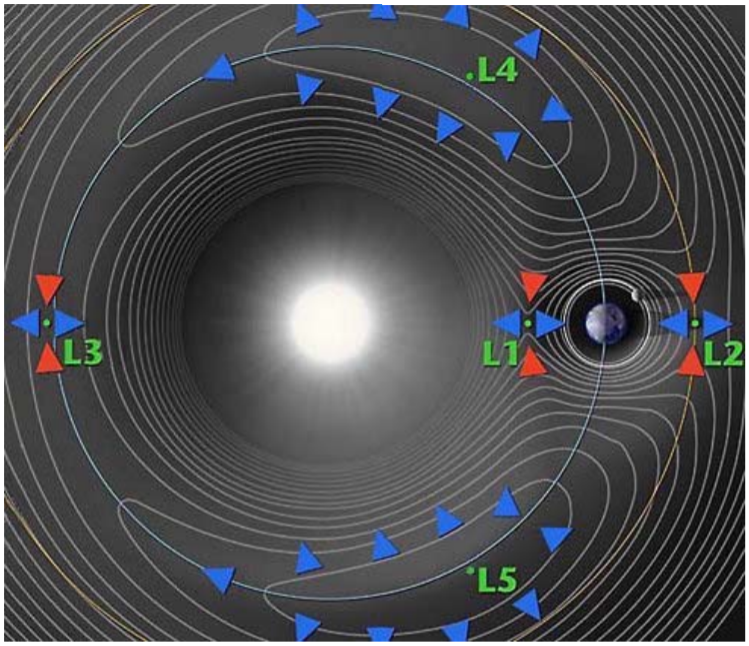
Euler y Lagrange mostraron que el sistema restringido de tres cuerpos tiene cinco puntos en los que la atracción gravitacional combinada más la fuerza centrípeta de los dos cuerpos grandes se cancelan. Estos se denominan los puntos Lagrange y se utilizan para estacionar satélites en órbitas estables con respecto al sistema Tierra-Luna, o con respecto al sistema Sol-Tierra. La figura\(\PageIndex{1}\) ilustra los cinco puntos Lagrange para el sistema Tierra-Sol. Sólo dos de los puntos Lagrange,\(L_{4}\) y\(L_{5}\) conducen a órbitas estables. Tenga en cuenta que estos puntos Lagrange son fijos con respecto al sistema Tierra-Sol que gira con respecto a los marcos de coordenadas inerciales. El descubrimiento\(1900\) de los asteroides troyanos en los puntos\(L_{4}\) y\(L_{5}\) Lagrange del sistema Sol-Júpiter confirmó las predicciones de Lagrange.
Poincaré demostró que el movimiento de una masa ligera unida a dos cuerpos pesados puede exhibir una sensibilidad extrema a las condiciones iniciales así como a las características del caos. La solución del problema de tres cuerpos ha seguido siendo un problema en gran parte sin resolver desde que Newton identificó las dificultades involucradas.