
11.13: Cinemática de dos cuerpos
- Page ID
- 126885
Hasta el momento la discusión se ha restringido al sistema de centro de impulso. Las mediciones reales de dispersión se realizan en el marco del laboratorio, por lo que es necesario transformar el ángulo de dispersión, las energías y las secciones transversales entre el laboratorio y el marco de coordenadas del centro de momento. En principio, la transformación entre los marcos de centro de momento y de laboratorio es sencilla, utilizando la adición vectorial del vector de velocidad de centro de masa y los vectores de velocidad de centro de momento de los dos cuerpos. En la siguiente discusión se asume que se aplica la cinemática no relativista.
En el capítulo\(2.8\) se demostró que, para la mecánica newtoniana, los marcos de referencia de centro de masa y centro de impulso son idénticos. Por definición, en el marco del centro de momento la suma vectorial del impulso lineal del proyectil entrante,\(p_{P}^{Initial}\) y el objetivo,\(p_{T}^{Initial}\) son iguales y opuestos. Eso es
\[\mathbf{p}_{P}^{Initial}+\mathbf{p}_{T}^{Initial}=0\label{11.161}\]
El uso del marco de centro de impulso, junto con la conservación del impulso lineal, implica que la suma vectorial de los momentos finales de los productos de\(N\) reacción,\(p_{i}^{Final},\) también es cero. Eso es
\[\sum_{i=1}^{N}\mathbf{p}_{i}^{Final}=0\label{11.162}\]
Una restricción adicional es que la conservación de energía relaciona las energías cinéticas inicial y final mediante
\[\frac{\left( p_{P}^{Initial}\right) ^{2}}{2m_{P}}+\frac{\left( p_{T}^{Initial}\right) ^{2}}{2m_{T}}+Q=\frac{\left( p_{P}^{Final}\right) ^{2} }{2m_{P}}+\frac{\left( p_{T}^{Final}\right) ^{2}}{2m_{T}}\label{11.163}\]
donde el\(Q\) valor es la energía aportada a la energía cinética total final por la reacción entre el proyectil entrante y el objetivo. Para las reacciones exotérmicas,\(Q>0,\) la cinética sumada de los productos de reacción excede la suma de las energías cinéticas entrantes, mientras que para las reacciones endotérmicas,\(Q<0,\) la energía cinética sumada de los productos de reacción es menor que la del canal entrante.
Para la cinemática de dos cuerpos, las siguientes son tres ventajas de trabajar en el marco de referencia del centro de impulso.
- Los dos cuerpos colisionantes incidentes son colineales al igual que los dos cuerpos finales.
- Los momentos lineales para los dos cuerpos colisionantes son idénticos tanto en el canal incidente como en el canal saliente.
- La energía total en el marco de coordenadas del centro de momento es la energía disponible para la reacción durante la colisión. La energía cinética trivial del marco de centro de momento en relación con el marco de laboratorio se maneja por separado.
La cinemática para reacciones de dos cuerpos se determina fácilmente utilizando la conservación del impulso lineal a lo largo y perpendicular a la dirección del haz más la conservación de energía,\ ref {11.161} -\ ref {11.163}. Nótese que es una práctica común utilizar el término “centro de masa” en lugar de “centro de impulso” a pesar de que, para la mecánica relativista, solo el centro de impulso es un concepto significativo.
Las características generales de la transformación entre el centro de momento y los marcos de referencia de laboratorio se ilustran mejor mediante la dispersión elástica o inelástica de núcleos donde los dos productos de reacción en el canal final son idénticos a los cuerpos incidentes. La excitación inelástica de una energía de estado excitado de\(\Delta E_{ex}\) en cualquiera de los productos de reacción corresponde a\(Q=-\Delta E_{exc},\) mientras que la dispersión elástica corresponde a\(Q=-\Delta E_{exc}=0\).
Para la dispersión inelástica, la conservación de los momentos lineales para el canal de salida en el centro de impulso simplifica a
\[\mathbf{p}_{P}^{Final}+\mathbf{p}_{T}^{Final}=0\]
es decir, los momentos lineales de los dos productos de reacción son iguales y opuestos.
Supongamos que la dirección del centro de impulso del proyectil disperso está en un ángulo\(\vartheta _{cm}^{P}=\vartheta\) relativo a la dirección del proyectil entrante y que el núcleo objetivo disperso está disperso en una dirección del centro de momento\(\vartheta _{cm}^{T}=\pi -\vartheta\). La dispersión elástica corresponde a una dispersión simple para la que las magnitudes de los momentos de proyectil entrante y saliente son iguales, es decir,\(\left\vert p_{P}^{Final}\right\vert =\left\vert p_{P}^{Initial}\right\vert\).
Velocidades
La transformación entre el centro de momento y los marcos de laboratorio requiere el conocimiento de las velocidades de las partículas que pueden derivarse de los momentos lineales ya que se conocen las masas de partículas. Supongamos que un proyectil, masa\(m_{P}\), con energía incidente\(E_{P}\) en el marco de laboratorio bombardea un objetivo estacionario con masa\(m_{T}.\) La velocidad del proyectil incidente\(v_{i}\) viene dada por
\[v_{i}=\sqrt{\frac{2E_{P}}{m_{P}}}\]
Las velocidades iniciales en el marco del laboratorio se toman para ser
\[\begin{align} w_{P} &=&v_{i} \tag{Initial Lab velocities} \\ w_{T} &=&0 \notag\end{align}\]
Las velocidades finales en el marco del laboratorio después de la colisión inelástica son\[\begin{align} &&w_{P}^{\prime } \tag{Final Lab velocities} \\ &&w_{T}^{\prime } \notag\end{align}\]
En el sistema de coordenadas de centro de impulso, la ecuación\((11.2.8)\) implica que las velocidades iniciales del centro de impulso son\[\begin{align} u_{P} &=&v_{i}\frac{m_{T}}{m_{P}+m_{T}} \notag \\ u_{T} &=&v_{i}\frac{m_{P}}{m_{P}+m_{T}}\end{align}\]
Es simple deducir que las velocidades finales del centro de momento después de la colisión inelástica están dadas por
\[\begin{align} u_{P}^{\prime } &=&\frac{m_{T}}{m_{P}+m_{T}}\sqrt{\frac{2}{m_{P}}\tilde{E}} \notag \\ u_{T}^{\prime } &=&\frac{m_{P}}{m_{P}+m_{T}}\sqrt{\frac{2}{m_{P}}\tilde{E}}\end{align}\]
La energía\(\tilde{E}\) se define para ser dada por
\[\tilde{E}=E_{P}+Q(1+\frac{m_{P}}{m_{T}})\]
donde\(Q=-\Delta E\) que es la energía de excitación de los estados finales excitados en el canal saliente.
Ángulos
Los ángulos de los retrocesos dispersos se escriben como
\[\begin{align} &&\theta _{lab}^{P} \tag{Final laboratory angles} \\ &&\theta _{lab}^{T} \notag\end{align}\]
y
\[\begin{align} \vartheta _{cm}^{P} &=&\vartheta \tag{Final CM angles} \\ \vartheta _{cm}^{T} &=&\pi -\vartheta \notag\end{align}\]
donde\(\vartheta\) está el ángulo de dispersión del centro de masa (centro de momento).
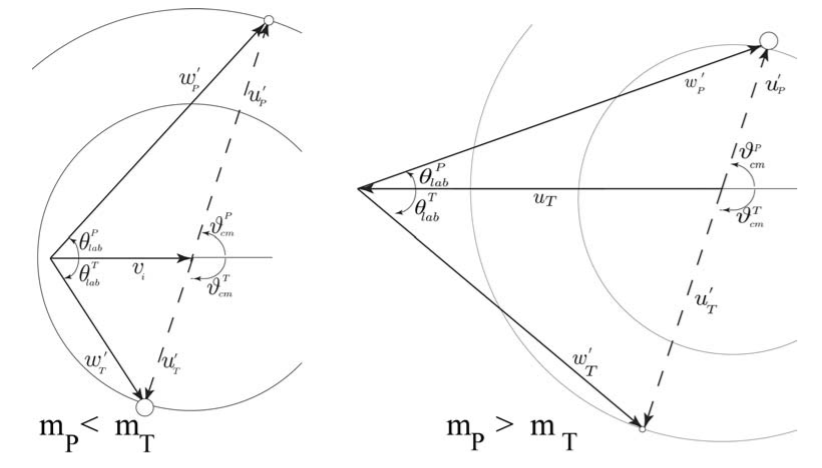
La figura\(\PageIndex{1}\) muestra que las relaciones angulares entre el laboratorio y el centro de los marcos de momento para el proyectil disperso están conectadas por
\[\frac{\sin (\vartheta _{cm}^{P}-\theta _{lab}^{P})}{\sin \theta _{lab}^{P}}= \frac{m_{P}}{m_{T}}\sqrt{\frac{E_{P}}{\tilde{E}}}\equiv \tau \label{11.169}\]
donde
\[\tau =\frac{m_{P}}{m_{T}}\frac{1}{\sqrt{1+\frac{Q}{E_{P}}(1+\frac{m_{P}}{ m_{T}})}}=\frac{m_{P}}{m_{T}}\frac{1}{\sqrt{1+\frac{Q}{E_{P}/m_{P}}(\frac{ m_{P}+m_{T}}{m_{P}m_{T}})}}\]
y\(\frac{E_{P}}{m_{P}}\) es la energía por nucleón en el proyectil incidente.
La ecuación\ ref {11.169} se puede reescribir como\[\tan \theta _{lab}^{P}=\frac{\sin \vartheta _{cm}^{P}}{\cos \vartheta _{cm}^{P}+\tau }\]
Otra relación útil de la Ecuación\ ref {11.169} da el ángulo de dispersión del centro de momento en términos del ángulo de dispersión de laboratorio.
\[\vartheta _{cm}^{P}=\sin ^{-1}(\tau \sin \theta _{lab}^{P})+\theta _{lab}^{P}\]
Esto da la diferencia de ángulo entre el ángulo de dispersión de laboratorio y el ángulo de dispersión del centro de momento. Tenga cuidado con esta relación ya que\(\vartheta _{lab}^{P}\) es de dos valores para la cinemática inversa correspondiente a los dos signos posibles para la solución.
Las relaciones de ángulo entre el laboratorio y el centro de impulso para el núcleo objetivo de retroceso están conectadas por
\[\frac{\sin (\vartheta _{cm}^{T}-\theta _{lab}^{T})}{\sin \theta _{lab}^{T}}= \sqrt{\frac{E_{P}}{\tilde{E}}}\equiv \tilde{\tau}\label{11.173}\]
Eso es
\[\vartheta _{cm}^{T}=\sin ^{-1}(\tilde{\tau}\sin \theta _{lab}^{T})+\theta _{lab}^{T}\]
donde\[\tilde{\tau}=\frac{1}{\sqrt{1+\frac{Q}{E_{P}}(1+\frac{m_{P}}{m_{T}})}}=\frac{ 1}{\sqrt{1+\frac{Q}{E_{P}/m_{P}}(\frac{m_{P}+m_{T}}{m_{P}m_{T}})}}\]
Nótese que\(\tilde{\tau}\) es lo mismo bajo intercambio de los dos núcleos a la misma energía/nucleón incidente, y que siempre\(\tilde{\tau}\) es mayor o igual a la unidad ya que\(Q\) es negativo. Para dispersión elástica\(\tilde{ \tau}=1\) que da\[\theta _{lab}^{T}=\frac{1}{2}(\pi -\vartheta ) \tag{Recoil lab angle for elastic scattering}\]
Para el retroceso objetivo, la ecuación\ ref {11.173} se puede reescribir como\[\tan \theta _{lab}^{T}=\frac{\sin \vartheta _{cm}^{T}}{\cos \vartheta _{cm}^{T}+\tilde{\tau}} \tag{Target lab to CM angle conversion}\]
Las hodografías vectoriales de velocidad proporcionan información útil sobre el comportamiento de las soluciones cinemáticas. Como se muestra en la Figura\(\PageIndex{1}\), en el marco de centro de momento el proyectil disperso tiene una velocidad final fija\(u_{P}^{\prime }\), es decir, el vector de velocidad describe un círculo en función de\(\vartheta\). La adición del vector de este vector y la velocidad del vector del centro de masa\(-u_{T}\) dan la velocidad del marco de laboratorio\(w_{P}^{\prime }\). Tenga en cuenta que para la cinemática normal, donde\(m_{P}<m_{T},\) luego\(\left\vert u_{T}\right\vert <\left\vert u_{P}^{\prime }\right\vert\) conduce a un mapeo monótono uno a uno del ángulo de centro de impulso\(\vartheta _{P}\) y\(\theta _{lab}^{P}\). Sin embargo, para la cinemática inversa, donde\(m_{P}>m_{T},\) luego\(\left\vert u_{T}\right\vert >\left\vert u_{P}^{\prime }\right\vert\) conduce a dos\(\vartheta\) soluciones valoradas en cualquier ángulo de dispersión de laboratorio fijo\(\theta\).
Las colisiones de bolas de billar son un ejemplo especialmente sencillo donde las dos masas son idénticas y la colisión es esencialmente elástica. Entonces esencialmente\(\tau =\tilde{\tau}=1\),\(\theta _{lab}^{P}=\frac{\vartheta _{cm}^{P}}{2},\) y\(\theta _{lab}^{T}=\frac{1}{2}\left( \pi -\vartheta _{cm}^{P}\right)\), es decir, el ángulo entre las bolas de billar dispersas es\(\frac{\pi }{2}\).
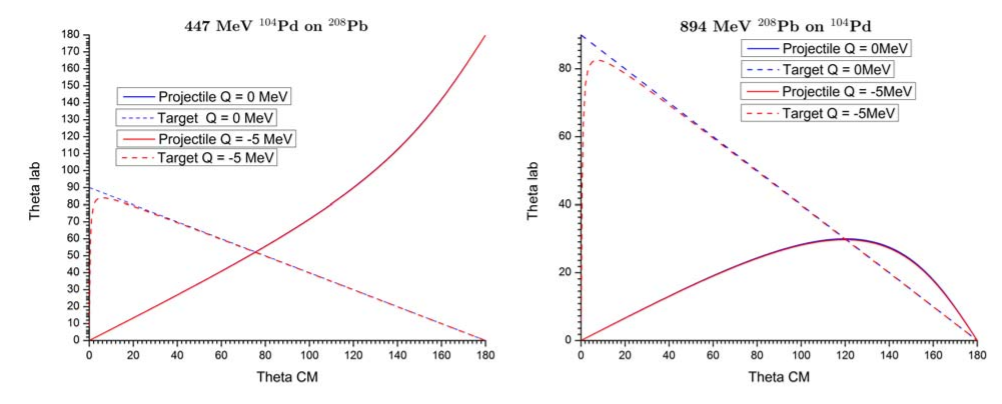
Tanto la cinemática normal como la inversa se ilustran en la Figura\(\PageIndex{2}\) que muestra la dependencia del proyectil y los ángulos de dispersión del objetivo en el marco de laboratorio como una función del ángulo de dispersión del centro de momento para la dispersión de Coulomb de\(^{104}\) Pd por\(^{208}\) Pb, es decir, para una relación de masa de \(2:1\). Tanto la cinemática normal como la inversa se muestran para la misma energía de bombardeo de\(4.3\)\(MeV/nucleon\) para dispersión elástica y para dispersión inelástica con un\(Q\) valor de\(-5MeV\).
Desde\(\sin (\vartheta _{cm}^{T}-\theta _{lab}^{T})\leq 1\) entonces, la Ecuación\ ref {11.173} implica que\(\tilde{\tau}\sin \theta _{lab}^{T}\leq 1.\) Dado que siempre\(\tilde{\tau}\) es mayor o igual a la unidad hay un ángulo de dispersión máximo en el marco de laboratorio para el núcleo objetivo de retroceso dado por
\[\sin \theta _{\max }^{T}=\frac{1}{\tilde{\tau}}\]
Para dispersión elástica\(\theta _{lab}^{T}=\sin ^{-1}(\frac{1}{\tilde{\tau}} )=90^{\circ }\) ya que tanto\(\tilde{\tau}=1\) para\(894\)\(MeV\)\(^{208}\) Pb bombardeando\(^{104}\) Pd, como para la reacción inversa usando un haz de\(447\)\(MeV\)\(^{104}\) Pd dispersado por un objetivo de\(^{208}\) Pb. Un\(Q\) valor de\(-5\)\(MeV\) da\(\ \tilde{\tau}=1.002808\) que implica un ángulo de dispersión máximo tanto\(\theta _{lab}^{T}=85.71^{\circ }\) para\(894\)\(MeV\)\(^{208}\) Pb bombardeo de\(^{104}\) Pd como para la reacción inversa de un haz de\(447\)\(MeV\)\(^{104}\) Pd dispersado por un\(^{208}\) Pb objetivo. Como consecuencia hay dos soluciones\(\vartheta _{cm}^{T}\) para cualquier valor permitido de\(\theta _{lab}^{T}\) como se ilustra en la Figura\(11.13.3\).
Desde\(\sin (\vartheta _{cm}^{P}-\theta _{lab}^{P})\leq 1\) entonces la ecuación\((11.12.18)\) implica que\(\tau \sin \theta _{lab}^{P}\leq 1.\) Para un haz de\(447\)\(MeV\)\(^{104}\) Pd dispersado por un objetivo de\(^{208}\) Pb\(\frac{m_{P}}{m_{T}}=0.50\), así\(\tau =0.5\) para dispersión elástica lo que implica que no hay límite superior a\(\theta _{lab}^{P}\). Esto conduce a una correspondencia uno a uno entre\(\theta _{lab}^{P}\) y\(\vartheta _{cm}^{P}\) para la cinemática normal. En contraste, el proyectil tiene un ángulo de dispersión máximo en el marco de laboratorio para cinemática inversa ya que\(\frac{m_{P}}{m_{T}}=2.0\) conduce a un límite superior a\(\theta _{lab}^{P}\) dado por
\[\sin \theta _{\max }^{P}=\frac{1}{\tau }\]
Para dispersión elástica\(\tau =2\) implicando\(\theta _{\max }^{P}=30^{\circ }\). Además de tener un valor máximo para\(\theta _{lab}^{P}\), cuando\(\tau >1,\) también hay dos soluciones para\(\vartheta _{cm}^{P}\) para cualquier valor permitido de\(\theta _{lab}^{P}\). Para el ejemplo de bombardeo de\(894\)\(MeV\)\(^{208}\) Pb\(^{178}\) Hf conduce a un ángulo máximo de dispersión de proyectil de\(\theta _{lab}^{P}=30.0^{\circ }\) para dispersión elástica y\(\theta _{lab}^{P}=29.907^{\circ }\) para\(Q=-5\)\(MeV.\)
Energías cinéticas
La energía cinética total inicial en el marco del centro de momento es
\[E_{cm}^{Initial}=E_{P} \frac{m_{T}}{m_{P}+m_{T}}\]
La energía cinética total final en el marco del centro de momento es\[E_{cm}^{Final}=E_{cm}^{Initial}+Q=\tilde{E}\frac{m_{T}}{m_{P}+m_{T}}\]
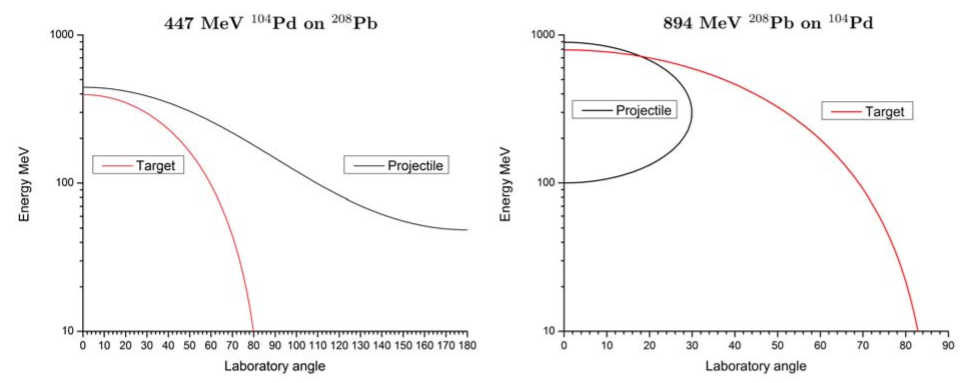
En el marco de laboratorio las energías cinéticas del proyectil dispersado y del núcleo objetivo de retroceso están dadas por
\[\begin{align} E_{P}^{Lab} &=&\left( \frac{m_{T}}{m_{P}+m_{T}}\right) ^{2}\left( 1+\tau ^{2}+2\tau \cos \vartheta _{cm}^{P}\right) \tilde{E} \\ E_{T}^{Lab} &=&\frac{m_{P}m_{T}}{\left( m_{P}+m_{T}\right) ^{2}}\left( 1+ \tilde{\tau}^{2}+2\tilde{\tau}\cos \vartheta _{cm}^{T}\right) \tilde{E}\end{align}\]
donde\(\vartheta _{cm}^{P}\) y\(\vartheta _{cm}^{T}\) son los ángulos de dispersión del centro de masa respectivamente para el proyectil disperso y los núcleos objetivo.
Para las energías incidentes elegidas, las reacciones normales e inversas dan la misma energía de centro de impulso de la\(298\)\(MeV\) cual es la energía disponible para la interacción entre los núcleos colisionantes. Sin embargo, la energía cinética del centro de impulso es\(447-298=149\)\(MeV\) para la cinemática normal y\(894-298=596\)\(MeV\) para la cinemática inversa. Esta energía cinética trivial del centro de impulso no contribuye a la reacción. Tenga en cuenta que la cinemática inversa enfoca todos los núcleos dispersos en el hemisferio delantero, lo que reduce el ángulo sólido requerido para la detección de partículas de retroceso.
Ángulos sólidos
Los ángulos sólidos del marco de laboratorio para el proyectil disperso y el objetivo se toman como\(d\omega _{P}\) y\(d\omega _{T}\) respectivamente, mientras que los ángulos sólidos del centro de momento son\(d\Omega _{P}\) y\(d\Omega _{T}\) respectivamente. El jacobiano relacionando los ángulos sólidos es\[\frac{d\omega _{P}}{d\Omega _{P}}=\left( \frac{\sin \theta _{lab}^{P}}{\sin \vartheta _{cm}^{P}}\right) ^{2}\left\vert \cos (\vartheta _{cm}^{P}-\theta _{lab}^{P})\right\vert\]
\[\frac{d\omega _{T}}{d\Omega _{T}}=\left( \frac{\sin \theta _{lab}^{T}}{\sin \vartheta _{cm}^{T}}\right) ^{2}\left\vert \cos (\vartheta _{cm}^{T}-\theta _{lab}^{T})\right\vert\]
Estos se pueden utilizar para transformar las secciones transversales del diferencial de centro de momento calculadas al marco de laboratorio para su comparación con los valores medidos. Tenga en cuenta que en relación con el marco de centro de impulso, el enfoque hacia adelante aumenta las secciones transversales diferenciales observadas en el marco de laboratorio delantero y las disminuye en el hemisferio posterior.
Explotación de la cinemática bicorporal
El cálculo de las relaciones de transformación no triviales anteriores entre el centro de masa y los marcos de coordenadas de laboratorio para la dispersión de dos cuerpos se usa ampliamente en muchos campos de la física. Esta discusión ha asumido una cinemática bicorporal no relativista. La cinemática relativista de dos cuerpos abarca la cinemática no relativista como se discute en el capítulo\(17.4\). Hay muchos códigos de computadora disponibles que pueden ser utilizados para realizar transformaciones no relativistas o relativistas.
Se destaca que la física subyacente para dos cuerpos que interactúan es idéntica independientemente de que la reacción se observe en el centro de masa o en los marcos de coordenadas de laboratorio. Es decir, ninguna nueva física está involucrada en la transformación cinemática. Sin embargo, la transformación entre estos marcos puede alterar drásticamente los ángulos y velocidades de los cuerpos dispersos observados, lo que puede ser beneficioso para la detección experimental. Por ejemplo, en la física nuclear de iones pesados, el proyectil y los núcleos objetivo pueden intercambiarse conduciendo a velocidades y ángulos de dispersión muy diferentes en el marco de referencia del laboratorio. Esto puede facilitar en gran medida la identificación y observación de los vectores de velocidades de los núcleos dispersos. En la física de alta energía es ventajoso colisionar haces que tengan vectores de momento lineales idénticos, pero opuestos, ya que entonces el marco de laboratorio es el marco de centro de masa, y se minimiza la energía requerida para acelerar los cuerpos colisionantes.