
12.2: Aceleración traslacional de un marco de referencia
- Page ID
- 126970
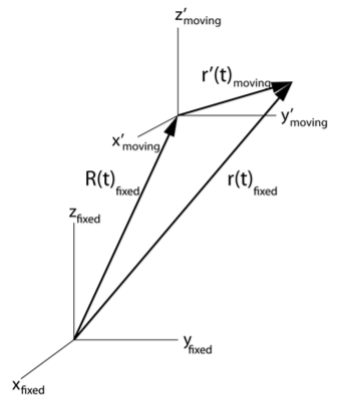
Consideremos un sistema inercial\((x_{fix},y_{fix},z_{fix})\) que se fija en el espacio, y un sistema no inercial\((x^{\prime}_{mov}, y^{\prime}_{mov}, z^{\prime}_{mov})\) que se mueve en una dirección relativa al bastidor fijo tal como para mantener orientaciones constantes de los ejes con respecto al bastidor fijo, como se ilustra en la Figura\(\PageIndex{1}\). El fotograma fijo se designa para ser el fotograma no cebado y, para evitar confusiones, el subíndice\(fix\) se une a las coordenadas fijas tomadas con respecto al marco de coordenadas fijas. De igual manera, el marco de referencia de traducción, que está en proceso de aceleración traslacional, tiene el subíndice\(mov\) unido a las coordenadas tomadas con respecto al marco de referencia de traducción. Las leyes del movimiento de Newton se obedecen solo en el marco de referencia inercial (no cebado). Los vectores de posición respectivos están relacionados por
\[\mathbf{r}_{fix} = \mathbf{R}_{fix}+\mathbf{r}^{\prime}_{mov} \label{12.1}\]
donde\(\mathbf{r}_{fix}\) es el vector relativo a la trama fija,\(\mathbf{r}^{\prime}_{mov}\) es el vector relativo a la trama de aceleración de traducción y\(\mathbf{R}_{fix}\) es el vector desde el origen de la trama fija hasta el origen de la trama acelerada. La ecuación diferenciadora\ ref {12.1} da la relación del vector de velocidad
\[\mathbf{v}_{fix} = \mathbf{V}_{fix}+ \mathbf{v}^{\prime}_{mov} \label{12.2}\]
dónde\(\mathbf{v}_{fix} = \frac{d\mathbf{r}_{fix}}{dt}\),\(\mathbf{v}^{\prime}_{mov} = \frac{d\mathbf{r}^{\prime}_{mov}}{dt}\) y\(\mathbf{V}_{fix} = \frac{d\mathbf{R}_{fix}}{dt}\). Del mismo modo la relación del vector de aceleración es
\[\mathbf{a}_{fix} = \mathbf{A}_{fix}+ \mathbf{a}^{\prime}_{mov} \label{12.3}\]
dónde\(\mathbf{a}_{fix} = \frac{d^2\mathbf{r}_{fix}}{dt^2}\),\(\mathbf{a}^{\prime}_{mov} = \frac{d^2\mathbf{r}^{\prime}_{mov}}{dt^2}\) y\(\mathbf{A}_{fix} = \frac{d^2\mathbf{R}_{fix}}{dt^2}\).
En el marco fijo, las leyes de Newton dan que
\[\mathbf{F}_{fix} = m\mathbf{a}_{fix} \label{12.4}\]
La fuerza en el marco fijo se puede separar en dos términos, la aceleración del marco de referencia de aceleración\(\mathbf{A}_{fix}\) más la aceleración con respecto al marco de aceleración\(\mathbf{a}^{\prime}_{mov}\).
\[\mathbf{F}_{fix} = m\mathbf{A}_{fix}+ m\mathbf{a}^{\prime}_{mov} \label{12.5}\]
En relación con el marco de referencia de aceleración, la aceleración viene dada por
\[m\mathbf{a}^{\prime}_{mov} = \mathbf{F}_{fix} - m\mathbf{A}_{fix} \label{12.6}\]
El marco de referencia acelerado puede explotar las leyes del movimiento de Newton utilizando una fuerza traslacional efectiva\(\mathbf{F}^{\prime}_{tran} \equiv \mathbf{F}_{fix} − m\mathbf{A}_{fix}\). El\(-m\mathbf{A}_{fix}\) término adicional se denomina fuerza inercial; se puede alterar eligiendo un marco de referencia no inercial diferente, es decir, depende del marco de referencia en el que se encuentre el observador.