
12.8: Fuerza Coriolis
- Page ID
- 126935
La fuerza de Coriolis se definió como
\[\mathbf{F}_{cor} = -2m\omega \times \mathbf{v}^{\prime\prime}_{rot} \label{12.41}\]
donde\(\mathbf{v}^{\prime\prime}\) es la velocidad medida en el marco giratorio (doble cebado). La fuerza de Coriolis es una fuerza interesante; es perpendicular tanto al eje de rotación como al vector de velocidad en el marco giratorio, es decir, es análoga a la fuerza magnética de\(q\mathbf{v} \times \mathbf{B}\) Lorentz.
La comprensión del efecto Coriolis se ve facilitada al considerar la física de un disco de hockey que se desliza sobre una mesa giratoria sin fricción. Supongamos que la mesa gira con frecuencia angular constante\(\omega = \omega \widehat{\mathbf{k}}\) alrededor del\(z\) eje. Para este sistema el origen del sistema giratorio es fijo, y la frecuencia angular es constante, por lo tanto\(\mathbf{A}\) y\(\dot{\omega} \times \mathbf{r}^{\prime}\) son cero. También se supone que no hay fuerzas externas que actúen sobre el disco de hockey, por lo que la aceleración neta del disco que se desliza sobre la mesa, como se ve en el marco giratorio, simplifica a
\[\mathbf{a}^{\prime\prime}_{rot} = -2\omega \times \mathbf{v}^{\prime\prime}_{rot} − \omega \times (\omega \times \mathbf{r}^{\prime}_{mov}) = −2\omega \widehat{\mathbf{k}} \times \mathbf{v}^{\prime\prime}_{rot} + \omega^2\mathbf{r}^{\prime}_{mov} \label{12.42}\]
La aceleración centrífuga\(+\omega^2\mathbf{r}^{\prime}_{mov}\) es radialmente hacia afuera mientras que la aceleración de Coriolis\(−2\omega \widehat{\mathbf{k}} \times \mathbf{v}^{\prime\prime}_{rot}\) está a la derecha. La integración de las ecuaciones de movimiento se puede utilizar para calcular las trayectorias en el marco de referencia giratorio.
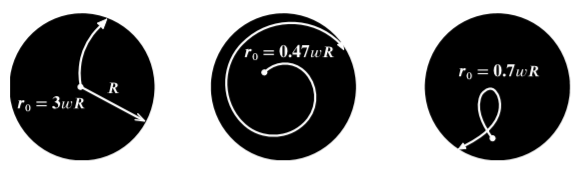
La figura\(\PageIndex{1}\) ilustra trayectorias del disco de hockey en el marco de referencia giratorio cuando no están actuando fuerzas externas, es decir, en el marco inercial el disco se mueve en línea recta con velocidad constante\(\mathbf{v}_0\). En el marco de referencia giratorio la fuerza de Coriolis acelera el disco hacia la derecha conduciendo a trayectorias que exhiben movimiento en espiral. Las aparentes trayectorias complicadas son el resultado de que el observador se encuentra en el marco giratorio para lo cual las trayectorias rectas de trama inercial del disco móvil exhiben una trayectoria en espiral en el marco giratorio.
La fuerza Coriolis es la razón por la que los vientos circulan en sentido antihorario alrededor de regiones de baja presión en el hemisferio norte de la Tierra. También tiene importantes consecuencias en muchas actividades en la tierra como el baile de ballet, el patinaje sobre hielo, la acrobacia, la rotación nuclear y molecular, y el movimiento de los misiles.
Ejemplo\(\PageIndex{1}\): Accelerating spring plane pendulum
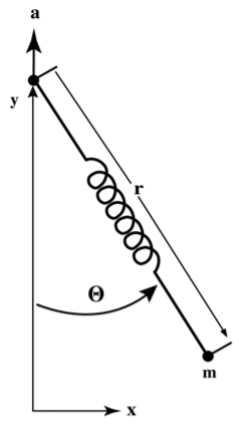
La comparación de los méritos relativos de usar un marco no inercial versus un marco inercial se da por un péndulo de resorte unido a un fulcro de aceleración. Como se muestra en la figura, el péndulo de resorte comprende una masa\(m\) unida a un resorte sin masa que tiene una longitud de reposo\(r_0\) y constante de resorte\(k\). El sistema se encuentra en un campo gravitacional vertical\(g\) y el fulcro del péndulo se acelera verticalmente hacia arriba con una aceleración constante\(a\). Supongamos que el péndulo de resorte oscila solo en el\(\theta\) plano vertical.
Bastidor inercial
Este problema se puede resolver en el sistema de coordenadas inerciales fijas con coordenadas\((x, y)\). Estas coordenadas, y sus derivadas de tiempo, se dan en términos\(r\)\(\theta\) de
\[\begin{align*} x & = r\sin\theta \\[4pt] \dot{x} & = \dot{r}\sin\theta + r\dot{\theta}\cos \theta \\[4pt] y & = -r\cos\theta + \frac{1}{2} a t^2 \\[4pt] \dot{y} &= r \dot{\theta} \sin \theta - \dot{r} \cos\theta + at \end{align*}\]
Así
\ [\ begin {align*} L &=\ frac {1} {2} m\ izquierda (\ punto {x} ^ {2} +\ punto {y} ^ {2}\ derecha) -m g y-\ frac {1} {2} k\ izquierda (r-r_ {0}\ derecha) ^ {2}\ &=\ frac {1} {2} m\ izquierda [\ punto {r} ^ {2} + r^ {2}\ punto {\ theta} ^ {2} +a^ {2} t^ {2} +2 a t (r\ punto {\ theta}\ sin\ theta-\ punto {r}\ cos\ theta)\ derecha] + m g\ izquierda (r\ cos\ theta-\ frac {1} {2} a t^ {2}\ derecha) -\ frac {1} {2} k\ izquierda (r-r_ {0}\ derecha) ^ {2}
\ final {alinear*}\]
Las ecuaciones de movimiento de Lagrange vienen dadas por
\[\begin{align*} \Lambda_{r} L &=0 \\[4pt] \ddot{r}-r \dot{\theta}^{2}-(a+g) \cos \theta+\frac{k}{m}\left(r-r_{0}\right) &=0 \\[4pt] \Lambda_{\theta} L&=0 \\[4pt] \ddot{\theta}+\frac{2}{r} \dot{r} \dot{\theta}+\frac{(a+g)}{r} \sin \theta &=0 \end{align*}\]
Los momentos generalizados son
\[\begin{align*} p_r & = \frac{\partial L}{\partial \dot{r}} \\[4pt] &= m\dot{r} - mat\cos \theta \\ p_{\theta} & = \frac{\partial L}{\partial \dot{\theta}} \\[4pt] &= mr^2 \dot{\theta} + matr \sin \theta \end{align*}\]
Estos conducen a las velocidades correspondientes de
\[\begin{aligned} \dot{r} & = & \frac{p_r}{m} + at \cos \theta \\ \dot{\theta} & = & \frac{p_{\theta}}{mr^2} - \frac{at \sin \theta}{r} \end{aligned}\]
y así el hamiltoniano es dado por
\[\begin{align*} H & = p_r \dot{r} + p_{\theta} \dot{\theta} − L \\ & = \frac{p^2_r}{2m} + \frac{p_{\theta}}{2mr^2} - \frac{at}{r} p_{\theta} \sin \theta + atp_r \cos \theta + \frac{1}{2} k (r - r_0)^2 + \frac{1}{2} mgat^2 - mgr \cos \theta \end{align*}\]
Las ecuaciones de movimiento de Hamilton dan eso
\[\begin{aligned} \dot{r} & = & \frac{\partial H}{\partial p_r} = \frac{p_r}{m} + at \cos \theta \\ \dot{\theta} & = & \frac{\partial H}{\partial p_{\theta}} = \frac{p_{\theta}}{mr^2} − \frac{at \sin \theta}{r} \end{aligned}\]
Estas velocidades radiales y angulares son las mismas que las obtenidas mediante mecánica lagrangiana. Las ecuaciones de Hamilton para\(\dot{p}_r\) y\(\dot{p}_\theta\) están dadas por
\[\dot{p}_r = −\frac{\partial H}{\partial \theta} = −\frac{at}{r^2} p_{\theta} \sin \theta − k (r − r_0) + mg \cos \theta + \frac{p^2_{\theta}}{mr^3} \nonumber\]
Del mismo modo
\[\dot{p}_{\theta} = −\frac{\partial H}{\partial \theta} = \frac{at}{r} p_{\theta} \cos \theta + atp_r \sin \theta − mgr \sin \theta \nonumber\]
Las ecuaciones de transformación que relacionan las coordenadas\(r, \theta\) generalizadas dependen del tiempo por lo que el hamiltoniano\(H\) no equivale a la energía total\(E\). Además ni el lagrangiano ni el hamiltoniano se conservan ya que ambos son dependientes del tiempo. El hecho de que el hamiltoniano no se conserve es obvio ya que todo el sistema se está acelerando hacia arriba conduciendo a aumentar las energías cinéticas y potenciales. Además, la derivada de tiempo del momento angular\(\dot{p}_\theta\) es distinta de cero, por lo que el momento angular no\(p_{\theta}\) se conserva.
Marco de fulcro no inercial
Este sistema también se puede abordar en el marco de referencia de fulcro no inercial acelerante que se fija al fulcro del resorte del péndulo. En este marco de referencia no inercial, la aceleración del marco se puede tomar en cuenta utilizando una aceleración efectiva\(a\) que se suma a la fuerza gravitacional; es decir,\(g\) se sustituye por una fuerza gravitacional efectiva\((g + a)\). Entonces el lagrangiano en el marco de fulcro simplifica a
\[L_{fulcrum} = \frac{1}{2} m\dot{r}^2 + r^2 \dot{\theta}^2 + m (g + a) (r \cos \theta ) − \frac{1}{2} k (r − r_0)^2 \nonumber\]
Las ecuaciones de movimiento de Lagrange en el marco de fulcro vienen dadas por
\[\begin{aligned} \Lambda_{r} L_{fulcrum}=0 && \\ && \ddot{r}-r \dot{\theta}^{2}-(a+g) \cos \theta+\frac{k}{m}\left(r-r_{0}\right)=0 \end{aligned}\]
\[\begin{aligned} \Lambda_{\theta} L_{fulcrum}=0 && \\ && \ddot{\theta}+\frac{2}{r} \dot{r} \dot{\theta}+\frac{(a+g)}{r} \sin \theta=0 \end{aligned}\]
Estas son idénticas a las ecuaciones de movimiento de Lagrange derivadas en el marco inercial.
Se\(L_{fulcrum}\) puede utilizar para derivar el momento en el marco de fulcro no inercial
\[\begin{aligned} \tilde{p}_r & = & \frac{\partial L_{fulcrum}}{\partial \dot{r}} = m\dot{r} \\ \tilde{p}_{\theta} & = & \frac{\partial L_{fulcrumr}}{\partial \dot{\theta}} = mr^2 \dot{\theta} \end{aligned}\]
que comprenden sólo una parte de los momentos derivados en el marco inercial. Estos momentos de fulcro parcial conducen a un hamiltoniano para el fulcum-frame de
\[H_{fulcrum}=\tilde{p}_{r} \dot{r}+\tilde{p}_{\theta} \dot{\theta}-L_{fulcrum}=\frac{\tilde{p}_{r}^{2}}{2 m}+\frac{\tilde{p}_{\theta}}{2 m r^{2}}+\frac{1}{2} k\left(r-r_{0}\right)^{2}-m(g+a) r \cos \theta \nonumber\]
Ambos\(L_{fulcrum}\) y\(H_{fulcrum}\) son independientes del tiempo y así el fulcro hamiltoniano\(H_{fulcrum}\) es una constante de movimiento en el marco de fulcro. Sin embargo,\(H_{fulcrum}\) no equivale a la energía total que aumenta con el tiempo debido a la aceleración del marco de fulcro en relación con el marco inercial. Este ejemplo ilustra que el uso de marcos no inerciales puede simplificar la solución de los sistemas de aceleración.
Ejemplo\(\PageIndex{2}\): Surface of rotating liquid
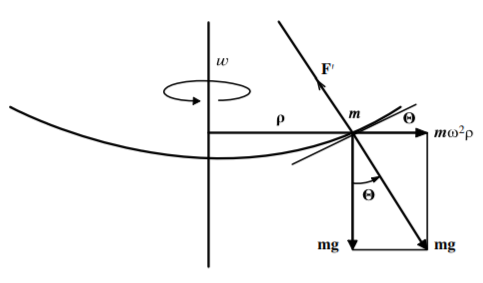
Encuentra la forma de la superficie del líquido en una cubeta que gira con velocidad angular\(\omega\) como se muestra en la figura adyacente. Supongamos que el líquido está en reposo en el marco de la cubeta. Por lo tanto, en el sistema de coordenadas que gira con el cubo de líquido, la fuerza centrífuga es importante mientras que las fuerzas Coriolis, traslacionales y transversales son cero. La fuerza externa
\[\mathbf{F} = \mathbf{F}^{\prime} − m\mathbf{g} \nonumber\]
donde\(\mathbf{F}^{\prime}\) está la presión que es perpendicular a la superficie. En equilibrio la aceleración de la superficie es cero, es decir
\[m\mathbf{a}^{\prime\prime} =0= \mathbf{F}^{\prime} + m (\mathbf{g} − \omega \times (\omega \times \mathbf{r}^{\prime} )) \nonumber\]
La fuerza gravitacional efectiva es
\[\mathbf{g}_{eff} = (\mathbf{g} − \omega \times (\omega \times \mathbf{r}^{\prime} )) \nonumber\]
que debe ser perpendicular a la superficie del líquido ya que\(\mathbf{F}^{\prime}\) es perpendicular a la superficie de un fluido, y la fuerza neta es cero. En coordenadas cilíndricas esto se puede escribir como
\[\mathbf{g}_{eff} = −g\widehat{\mathbf{z}} + \rho \omega^2 \widehat{\mathbf{p}} \nonumber\]
De la cifra se puede deducir que
\[\tan \theta = \frac{dz}{d\rho} = \frac{\rho \omega^2}{g}\nonumber\]
Por integración
\[z = \frac{\omega^2}{2g} \rho^2 + \text{ constant} \nonumber\]
Esta es la ecuación de un paraboloide y corresponde a una superficie de energía equipotencial gravitacional parabólica. Los astrofísicos construyen grandes espejos parabólicos para telescopios girando continuamente una gran tina de vidrio mientras se solidifica. Esto es mucho más fácil que moler un bloque cilíndrico grande de vidrio en forma parabólica.
Ejemplo\(\PageIndex{3}\): The pirouette
Una aplicación interesante de la fuerza Coriolis es el problema de un patinador de hielo giratorio o bailarín de ballet. Su frecuencia angular aumenta cuando dibuja en sus brazos. La explicación convencional es que el momento angular se conserva en ausencia de fuerzas externas lo cual es correcto. Así como su momento de inercia disminuye cuando retrae los brazos, su velocidad angular debe aumentar para mantener un momento angular constante\(\mathbf{L} = I \omega\). Pero esta explicación no aborda la pregunta de ¿cuáles son las fuerzas que provocan que aumente la frecuencia angular? Las verdaderas fuerzas radiales que siente la patinadora cuando retrae sus brazos no pueden conducir directamente a una aceleración angular ya que las fuerzas radiales son perpendiculares a la rotación. La siguiente derivación muestra que la fuerza de Coriolis\(−2m\omega \times \mathbf{v}^{\prime\prime}_{rot}\) actúa tangencialmente a la velocidad de retracción radial de sus brazos conduciendo a la aceleración angular requerida para mantener el momento angular constante.
Considere que una masa\(m\) se mueve radialmente a una velocidad\(\dot{r}^{\prime\prime}_{rot}\) entonces la fuerza de Coriolis en el marco giratorio es
\[\mathbf{F}_{cor} = −2m\omega \times \mathbf{\dot{r}}^{\prime\prime}_{rot} \nonumber\]
Esta fuerza de Coriolis conduce a una aceleración angular de la masa de
\[\dot{\omega} = -\frac{2\omega \times \mathbf{\dot{r}}^{\prime\prime}_{rot}}{r^{\prime\prime}} \label{alpha} \tag{$\alpha$}\]
es decir, la frecuencia rotacional disminuye si se incrementa el radio. Tenga en cuenta que, como se muestra en la ecuación\((12.3.11)\),\(\dot{\omega} = \dot{\omega}^{\prime\prime}\). Este valor distinto de cero de\(\dot{\omega}\) obviamente conduce a una fuerza azimutal además de la fuerza Coriolis. Considere la tasa de cambio del momento angular para la masa giratoria\(m\) asumiendo que el momento angular proviene puramente de la rotación\(\omega\). Luego en el marco giratorio
\[\mathbf{\dot{p}}_{\theta^{\prime\prime}} = \frac{d}{dt} (mr'' ^2 \omega ) = 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega + mr^{\prime\prime 2} \mathbf{\dot{\omega}} \nonumber\]
Sustituyendo la ecuación\ ref {alpha} para\(\dot{\omega}\) en el segundo término da
\[\mathbf{\dot{p}}_{\theta ''} = 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega - 2mr^{\prime\prime} \dot{r}^{\prime\prime} \omega = 0 \nonumber\]
Es decir, los dos términos cancelan. Así se conserva el momento angular para este caso donde la velocidad es radial. Obsérvese que, dado que se supone que\({p_{\theta}}^{''}\) es colineal con\(\omega\), entonces es lo mismo tanto en los marcos estacionarios como rotativos de referencia y así se conserva el momento angular en ambos marcos. Además, en el marco fijo, el momento angular se conserva si no hay pares externos actuando como se supone anteriormente.
Tenga en cuenta que la energía rotacional es
\[E_{rot} = \frac{1}{2} I \omega^2 \nonumber\]
También se conserva el momento angular, es decir
\[\mathbf{p}_{\theta} = I\omega = I \hat{\omega} \nonumber\]
Sustituir\(\omega = \frac{p_{\theta}}{I}\) en la energía rotacional da
\[E_{rot} = \frac{p^{2}_{\theta}}{2I} = \frac{l^2}{2I} \nonumber\]
Por lo tanto, la energía rotacional en realidad aumenta a medida que disminuye el momento de inercia cuando la patinadora sobre hielo tira de sus brazos cerca de su cuerpo. Este incremento en la energía rotacional es proporcionado por el trabajo realizado a medida que la bailarina tira de sus brazos hacia adentro contra la fuerza centrífuga.