
12.9: Reducción de Ruthian para Sistemas Rotativos
- Page ID
- 126961
La técnica de reducción rutina, que se introdujo en el capítulo\(8.6\), es un enfoque variacional híbrido. Fue ideado por Routh para manejar las variables cíclicas y no cíclicas por separado con el fin de explotar simultáneamente las diferentes ventajas de las formulaciones hamiltoniana y lagrangiana. La técnica de reducción Routhian es un método poderoso para manejar sistemas rotativos que van desde galaxias hasta moléculas, o núcleos deformados, así como maquinaria rotativa en ingeniería. Una característica valiosa de la formulación hamiltoniana es que permite la eliminación de variables cíclicas lo que reduce el número de grados de libertad a manejar. Como consecuencia, las variables cíclicas se denominan variables ignorables en la mecánica hamiltoniana. El lagrangiano, el hamiltoniano y el rutiano son todos escalares bajo rotación y por lo tanto son invariantes a la rotación del marco de referencia. Tenga en cuenta que a menudo solo hay dos variables cíclicas para un sistema giratorio, es decir,\(\dot{\theta} = \boldsymbol{\omega}\) y el momento angular total canónico correspondiente\(p_{\theta} = \mathbf{J}\).
Como se mencionó en el capítulo\(8.6\), hay dos posibles ruthianos que son útiles para manejar marcos de rotación de referencia. Para sistemas giratorios, el Routhian cíclico\(R_{cyclic}\) simplifica
\[R_{cyclic}\left(q_{1}, \ldots, q_{n} ; \dot{q}_{1}, \ldots, \dot{q}_{s} ; p_{s+1}, \ldots, p_{n} ; t\right)=H_{cyclic}-L_{noncyclic}=\boldsymbol{\omega} \cdot \mathbf{J}-L \label{12.43}\]
Este rutiano se comporta como un hamiltoniano para las ignorables coordenadas cíclicas\(\omega, \mathbf{J}\). Simultáneamente se comporta como un lagrangiano negativo\(L_{noncyclic}\) para todas las demás coordenadas.
Los\(R_{noncyclic}\) complementos ruthianos no cíclicos\(R_{cyclic}\) en el sentido de que se define como
\[R_{noncyclic}\left(q_{1}, \ldots, q_{n} ; p_{1}, \ldots, p_{s} ; \dot{q}_{s+1}, \ldots, \dot{q}_{n} ; t\right)=H_{noncyclic}-L_{cyclic}=H - \boldsymbol{\omega} \cdot \mathbf{J} \label{12.44}\]
Este ruthiano no cíclico se comporta como un hamiltoniano para todas las variables no cíclicas y se comporta como un lagrangiano negativo para las dos variables cíclicas\(\omega , p_{\omega}\). Dado que las variables cíclicas son constantes de movimiento, entonces\(R_{noncyclic}\) es una constante de movimiento que iguala la energía en el marco giratorio si\(H\) es una constante de movimiento. Sin embargo,\(R_{noncyclic}\) no equivale a la energía total ya que la transformación de coordenadas depende del tiempo, es decir, la rutina\(R_{noncyclic}\) corresponde a la energía de las partes no cíclicas del movimiento.
Por ejemplo, el Routhian\(R_{noncyclic}\) para un sistema que está siendo acodado alrededor del\(\phi\) eje a alguna frecuencia angular fija\(\dot{\phi} = \omega\), con el momento angular total correspondiente\(\mathbf{p}\phi = \mathbf{J}\), puede escribirse como 1
\[\begin{align} R_{noncyclic} & = & H − \boldsymbol{\omega} \cdot \mathbf{J} \label{12.45} \\ & = & \frac{1}{2} m \left[ \mathbf{V} \cdot \mathbf{V} + \mathbf{v}^{\prime\prime} \cdot \mathbf{v}^{\prime\prime}+2\mathbf{V} \cdot \mathbf{v}^{\prime\prime}+2\mathbf{V} \cdot (\boldsymbol{\omega} \times \mathbf{r}^{\prime} )+2v^{\prime\prime} \cdot (\boldsymbol{\omega} \times \mathbf{r}^{\prime} )+(\boldsymbol{\omega} \times \mathbf{r}^{\prime} )^2 \right] − \boldsymbol{\omega} \cdot \mathbf{J} + U(r) \notag \end{align}\]
Tenga en cuenta que\(R_{noncyclic}\) es una constante de movimiento si\(\frac{\partial L}{\partial t} = 0\), que es el caso cuando el sistema está siendo arrancado a una frecuencia angular constante. Sin embargo, el hamiltoniano en el marco giratorio\(H_{rot} = H − \boldsymbol{\omega} \cdot \mathbf{J}\) viene dado por\(R_{noncyclic} = H_{rot} \neq E\) ya que la transformación de coordenadas depende del tiempo. Las ecuaciones canónicas de Hamilton para los términos cuarto y quinto en el paréntesis se pueden identificar con la fuerza de Coriolis\(2m\boldsymbol{\omega} \times \mathbf{v}^{\prime\prime}\), mientras que el último término en el paréntesis se identifica con la fuerza centrífuga. Es decir, definir
\[U_{cf} \equiv - \frac{1}{2} m (\boldsymbol{\omega} \times \mathbf{r}^{\prime} )^2 \label{12.46}\]
donde el gradiente de\(U_{cf}\) da la fuerza centrífuga habitual.
\[\mathbf{F}_{c f}=-\nabla U_{c f}=\frac{m}{2} \nabla\left[\omega^{2} r^{\prime 2}-\left(\boldsymbol{\omega} \cdot \mathbf{r}^{\prime}\right)^{2}\right]=m\left[\omega^{2} \mathbf{r}^{\prime}-\left(\boldsymbol{\omega} \cdot \mathbf{r}^{\prime}\right) \boldsymbol{\omega}\right]=-m \boldsymbol{\omega} \times\left(\boldsymbol{\omega} \times \mathbf{r}^{\prime}\right)\label{12.47}\]
El método de reducción Routhian se utiliza ampliamente en la ciencia y la ingeniería para describir el movimiento rotacional de cuerpos rígidos, moléculas, núcleos deformados y objetos astrofísicos. Las variables cíclicas describen la rotación del marco y así la Routhian\(R_{noncyclic} = H_{rot}\) corresponde a la hamiltoniana para las variables no cíclicas en el marco giratorio.
Ejemplo\(\PageIndex{1}\): Cranked plane pendulum
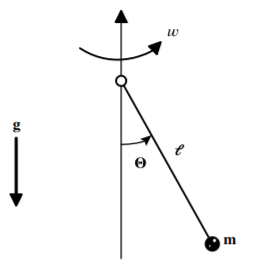
El péndulo plano acodado, que también se llama péndulo plano giratorio, comprende un péndulo plano que se manivela alrededor de un eje vertical a una velocidad\(\dot{\phi} = \omega\) angular constante determinada por algún mecanismo de accionamiento externo. Los parámetros se ilustran en la figura adyacente. El péndulo acodado ilustra muy bien las ventajas de trabajar en un marco giratorio no inercial para un sistema giratorio accionado. Aunque el péndulo plano acodado se parece al péndulo esférico, hay una diferencia muy importante; para el péndulo esférico\(p_{\phi} = ml^2 \sin^2 \theta \dot{\phi}\) es una constante de movimiento y así la velocidad angular varía con\(\theta\), es decir\(\dot{\phi} = \frac{p_{\phi}}{ml^2 \sin^2 \theta}\), mientras que para el péndulo plano acodado, la constante de el movimiento es\(\dot{\phi} = \omega\) y por lo tanto el momento angular varía con\(\theta\), es decir\(p_{\phi} = l \sin^2 \theta \omega\). Para el péndulo plano acodado, la energía debe fluir dentro y fuera del sistema de accionamiento de arranque que proporciona la fuerza de restricción para satisfacer la ecuación de restricción
\[g_{\phi} = \dot{\phi} − \omega = 0 \notag\]
La forma más fácil de resolver las ecuaciones de movimiento para el péndulo plano acodado es usar coordenadas generalizadas para absorber la ecuación de restricción y par de restricción aplicado. Esto se hace incorporando la\(\dot{\phi} = \omega\) restricción explícitamente en el lagrangiano o hamiltoniano y resolviendo por solo\(\theta\) en el marco giratorio.
Suponiendo que\(\dot{\phi} = \omega\), y usando coordenadas generalizadas para absorber las fuerzas de restricción de arranque, entonces el Lagrangiano para el péndulo acodado se puede escribir como.
\[L = \frac{1}{2} ml^2 (\dot{\theta}^2 + \sin^2 \theta \omega^2) + mgl \cos \theta \notag\]
El momento conjugado a\(\theta\) es
\[p_{\theta} = \frac{\partial L}{\partial \dot{\theta}} = ml^2 \dot{\theta} \notag\]
Considera el rutiano\(R_{noncyclic} = p_{\theta} \dot{\theta} − L = H − p_{\phi} \dot{\phi}\) que actúa como hamiltoniano\(H_{rot}\) en el marco giratorio
\[R_{noncyclic} = p_{\theta} \dot{\theta} − L = H - p_{\phi} \dot{\phi} = \frac{p^2_{\theta}}{2ml^2} - \frac{1}{2} ml^2 \omega^2 \sin^2 \theta − mgl \cos \theta \nonumber\]
Tenga en cuenta que si\(\dot{\phi} = \omega\) es constante, entonces\(R_{noncyclic}\) es una constante de movimiento para la rotación alrededor del\(\phi\) eje ya que es independiente de\(\phi\). También\(\frac{dR_{noncyclic}}{dt} = −\frac{\partial L}{\partial t} = 0\) así la energía en el marco giratorio no inercial del péndulo\(R_{noncyclic} = H_{rot} = H − p_{\phi} \dot{\phi}\) es una constante de movimiento, pero no equivale a la energía total ya que la transformación de coordenadas giratorias depende del tiempo. El conductor que manivela el sistema a una constante\(\omega\) proporciona o absorbe la energía a\(dW = dE = \omega dp_{\phi}\) medida que\(\theta\) cambia para mantener una constante\(\omega\).
El Routhian\(R_{noncyclic}\) puede ser utilizado para derivar las ecuaciones de movimiento usando la mecánica hamiltoniana.
\[\dot{\theta} = \frac{\partial R_{noncyclic}}{\partial p_{\theta}} = \frac{p_{\theta}}{ml^2} \notag\]
\[\dot{p}_{\theta} = −\frac{\partial R_{noncyclic}}{\partial \theta} = −mgl \sin \theta \left[ 1 − \frac{l}{g} \cos \theta \omega^2 \right] \nonumber\]
Desde entonces\(\dot{p}_{\theta} = m;^2 \ddot{\theta}\), la ecuación del movimiento es
\[\ddot{\theta} + \frac{g}{l} \sin \theta \left[ 1 − \frac{l}{g} \cos \theta \omega^2 \right] = 0 \label{alpha} \tag{$\alpha$}\]
Suponiendo que\(\sin \theta \approx \theta\), entonces la Ecuación\ ref {alpha} conduce a soluciones de osciladores armónicos lineales alrededor de un mínimo en\(\theta = 0\) si el término entre paréntesis es positivo. Es decir, cuando el corchete\(\left[ 1 − \frac{l}{g} \cos \theta \omega^2 \right] > 0\) entonces la ecuación\(\ref{alpha}\) corresponde a un oscilador armónico con velocidad angular\(\Omega\) dada por
\[\Omega^2 = \frac{g}{l} \sin \theta \left[ 1 − \frac{l}{g} \cos \theta \omega^2 \right] \notag\]
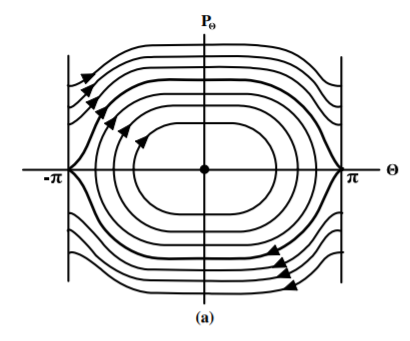
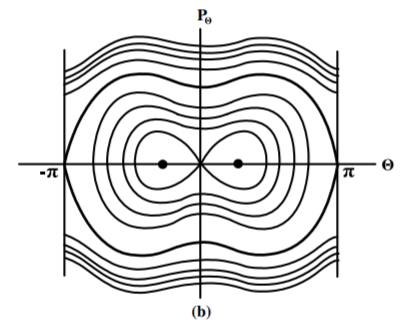
La figura adyacente muestra los diagramas de fase-espacio para un péndulo plano que gira alrededor de un eje vertical a velocidad angular\(\omega\) para (a)\(\omega < \sqrt{\frac{g}{l}}\) y (b)\(\omega > \sqrt{\frac{g}{l}}\). La gráfica de fase superior muestra pequeña\(\omega\) cuando el corchete de la Ecuación\ ref {alpha} es positivo y las trayectorias del espacio de fase son elipses alrededor del punto de equilibrio estable\((0, 0)\). A medida que\(\omega\) aumenta el soporte se vuelve más pequeño y cambia de signo cuando\(\omega^2 \cos \theta = \frac{g}{l}\). Para mayor,\(\omega\) el corchete es negativo, lo que lleva a trayectorias de espacio de fase hiperbólico alrededor del punto de\((\theta , p_{\theta} ) = (0, 0)\) equilibrio, es decir, un punto de equilibrio inestable. Sin embargo, nuevos puntos de equilibrio estables ahora ocurren en ángulos\((\theta , p_{\theta} ) =(\pm \theta_0, 0)\) donde\(\cos \theta_0 = \frac{g}{l \omega^2}\). Es decir, el punto de equilibrio\((0, 0)\) sufre bifurcación como se ilustra en la figura inferior. Estos nuevos puntos de equilibrio son estables como lo ilustran las trayectorias elípticas alrededor de estos puntos. Es interesante que estos nuevos puntos de equilibrio\(\pm \theta_0\) se mueven a ángulos más grandes dados por\(\cos \theta_0 = \frac{g}{l\omega^2}\) más allá del punto de bifurcación en\(\frac{g}{l\omega^2} = 1\). Para baja energía, la masa oscila alrededor del mínimo en\(\theta = \theta_0\) mientras que el movimiento se vuelve más complicado para una mayor energía. La bifurcación corresponde a ruptura de simetría ya que, bajo reflexión espacial, el punto de equilibrio no cambia a bajas frecuencias rotacionales pero se transforma de\(+\theta_0\) a\(−\theta_0\) una vez que la solución se bifurca, es decir, se rompe la simetría. También puede ocurrir caos en la separatriz que separa la bifurcación. Tenga en cuenta que el enfoque multiplicador Lagrange, o el enfoque de fuerza generalizada, se pueden utilizar para determinar el par aplicado requerido para asegurar una constante\(\omega\) para el péndulo acodado.
Ejemplo\(\PageIndex{2}\): Nucleon orbits in deformed nuclei
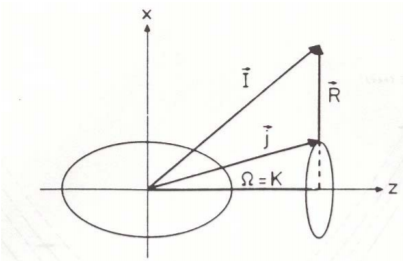
Considerar la rotación del núcleo axialmente simétrico, deformado por prolatos. Muchos núcleos tienen una forma esferoidal prolada, (la forma de una pelota de rugby) y giran perpendiculares al eje de simetría. En el marco fijo al cuerpo no inercial, pares de nucleones, cada uno con momento angular\(j\), se unen en órbitas con la proyección del momento angular a lo largo del eje de simetría conservándose con valor\(\Omega = K\), que es una variable cíclica. Dado que el núcleo es de dimensiones\(10^{−14}\)\(m\), la cuantificación es importante y las energías de unión cuantificadas de los nucleones individuales están separadas por espaciamientos\(\leq 500\)\(keV\).
Los lagrangianos y hamiltonianos son escalares y pueden ser evaluados en cualquier marco de coordenadas de referencia. Es más útil calcular el Hamiltoniano para un cuerpo deformado en el marco de referencia fijo al cuerpo giratorio no inercial. El Hamiltoniano con cuerpo fijo corresponde al rutiano\(R_{noncyclic}\)
\[R_{noncyclic} = H − \boldsymbol{\omega} \cdot \mathbf{J}\notag\]
donde se asume que el núcleo deformado tiene el eje de simetría a lo largo de la\(z\) dirección y gira alrededor del\(x\) eje. Dado que el Routhian es para un marco de referencia giratorio no inercial, no incluye la energía total pero, si la forma es constante en el tiempo, entonces\(R_{noncyclic}\) y el correspondiente Hamiltoniano fijo al cuerpo se conservan y los niveles de energía para los nucleones unidos en el pozo potencial esferoidal pueden ser calculado mediante un modelo mecánico cuántico convencional.
Para un pozo de potencial deformado esferoidal prolado, las órbitas de nucleones que tienen el momento angular casi alineado con el eje de simetría corresponden a trayectorias de nucleones que están restringidas a la parte más estrecha del esferoide, mientras que trayectorias con el vector de momento angular cerca de perpendicular a la los ejes de simetría tienen trayectorias que sondean los radios más grandes del esferoide. El Principio de Incertidumbre de Heisenberg, mencionado en el capítulo\(3.11.3\), describe cómo las órbitas restringidas a la dimensión más pequeña tendrán el impulso lineal más alto, y la correspondiente energía cinética, y viceversa para las órbitas de mayor tamaño. Así, la energía de unión de diferentes trayectorias nucleónicas en el potencial esferoidal depende bien del ángulo entre el vector de momento angular y el eje de simetría del esferoide, así como de la deformación del esferoide. Se resuelve un modelo nuclear quantal hamiltoniano para pozos potenciales de forma esferoidal supuesta. Cada una de las órbitas correspondientes tiene momentos angulares\(\mathbf{j}_i\) para los cuales\(\Omega_i\) se conserva la proyección del momento angular a lo largo del eje de simetría, pero la proyección de\(\mathbf{j}_i\) en el marco de laboratorio no\(j_z\) se conserva ya que el pozo potencial no es esféricamente simétrico. Sin embargo, el hamiltoniano total es esféricamente simétrico en el marco de laboratorio, lo que se satisface al permitir que el potencial esferoidal deformado gire libremente en el marco del laboratorio, y luego\(j^2_i\)\(j_{i,z}\),, y\(\Omega_i\) todas son cantidades conservadas. La atractiva interacción de emparejamiento nucleón-nucleón residual da como resultado que pares de nucleones se unan en órbitas\((j \times j)^0\) invertidas en el tiempo, es decir, con cero de espín total resultante, en este potencial nuclear esferoidal. La excitación de un núcleo par par puede romper un par y luego la proyección total del momento angular a lo largo del eje de simetría es\(K = |\Omega_1 \pm \Omega_2|\), dependiendo de si las proyecciones son paralelas o antiparalelas. Más energía de excitación puede romper varios pares y las proyecciones continúan siendo aditivas. Las energías vinculantes calculadas en el pozo de potencial esferoidal deben agregarse a la energía rotacional\(E_{rot} = \frac{\mathcal{J}}{2} \omega^2\) para obtener la energía total, donde\(\mathcal{J}\) está el momento de inercia. Las mediciones de la estructura nuclear concuerdan con las predicciones de los cálculos de la estructura nuclear que emplean el enfoque rutiano.
1 Para mayor claridad, las secciones\((12.2)\)\((12.8)\) de este capítulo adoptaron una convención de nomenclatura que utiliza coordenadas no cebadas con el subíndice\(fix\) para el marco inercial de referencia, coordenadas cebadas con el subíndice\(mov\) para las coordenadas de traducción, y doble cebado coordina con el subíndice\(rot\) para el marco de traslación más rotación. Por brevedad, la discusión posterior omite los subíndices redundantes\(fix\)\(mov\),\(rot\) ya que los superíndices primos simples y dobles definen completamente los marcos de referencia móviles y giratorios.