
19.4: Apéndice - Sistemas de coordenadas ortogonales
- Page ID
- 126606
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Los métodos de análisis vectorial proporcionan una representación conveniente de las leyes físicas. Sin embargo, la manipulación de los campos escalar y vectoriales se ve muy facilitada por el uso de componentes con respecto a un sistema de coordenadas ortogonales como el siguiente.
Coordenadas cartesianas\((x, y, z)\)
Las coordenadas cartesianas (rectangulares) proporcionan el sistema de coordenadas rectangulares ortogonales más simple. Los vectores unitarios que especifican la dirección a lo largo de los tres ejes ortogonales se toman como\((\mathbf{\hat{i}},\mathbf{\hat{j}}, \mathbf{\hat{k}})\). En las coordenadas cartesianas, las funciones escalares y vectoriales se escriben como
\[\phi = \phi (x, y, z) \label{C.1}\]
\[\mathbf{r} = x\mathbf{\hat{i}}+y\mathbf{\hat{j}}+z\mathbf{\hat{k}} \label{C.2}\]
El cálculo de las derivadas de tiempo del vector de posición es especialmente simple usando coordenadas cartesianas porque los vectores unitarios\((\mathbf{\hat{i}},\mathbf{\hat{j}}, \mathbf{\hat{k}})\) son constantes e independientes en el tiempo. Es decir;
\[\frac{d\mathbf{\hat{i}}}{ dt} = \frac{d\mathbf{\hat{j}}}{ dt} = \frac{d\mathbf{\hat{k}}}{ dt} = 0 \nonumber\]
Dado que las derivadas de tiempo de los vectores unitarios son todas cero, entonces la velocidad se\(\mathbf{\dot{r}} = \frac{d\mathbf{r}}{ dt}\) reduce a las derivadas de tiempo parcial de\(x\),\(y\), y\(z\). Es decir,
\[\mathbf{\dot{r}} = \dot{x} \mathbf{\hat{i}} + \dot{y} \mathbf{\hat{j}} + \dot{z} \mathbf{\hat{k}} \label{C.3}\]
Del mismo modo la aceleración viene dada por
\[\mathbf{\ddot{r}} = \ddot{x} \mathbf{\hat{i}} + \ddot{y} \mathbf{\hat{j}} + \ddot{z} \mathbf{\hat{k}} \label{C.4}\]
Sistemas de coordenadas curvilíneas
Hay muchos ejemplos en física donde la simetría del problema hace que sea más conveniente resolver el movimiento en un punto\(P(x, y, z)\) usando sistemas de coordenadas curvilíneas no cartesianas. Por ejemplo, los problemas que tienen simetría esférica se manejan más convenientemente usando un sistema de coordenadas esféricas\((r, \theta , \phi )\) con el origen en el centro de la simetría esférica. Tales problemas ocurren frecuentemente en electrostáticos y gravitación; por ejemplo, soluciones del átomo, o sistemas planetarios. Tenga en cuenta que todavía se requiere un sistema de coordenadas cartesianas para definir el origen más los ángulos polar y azimutal\(\theta , \phi \). El uso de coordenadas esféricas para un sistema de simetría esférica permite que el problema sea factorizado en una parte angular cíclica, la solución que involucra armónicos esféricos que son comunes a todos esos problemas esféricamente simétricos, más una parte radial unidimensional que contiene los detalles del particular Potencial esféricamente simétrico. Del mismo modo, para problemas que involucran simetría cilíndrica, es mucho más conveniente usar un sistema de coordenadas cilíndricas\((\rho , \phi , z)\). Nuevamente es necesario utilizar un sistema de coordenadas cartesianas para definir el origen y el ángulo\(\phi \). El movimiento en un plano se puede manejar usando coordenadas polares bidimensionales.
Los sistemas de coordenadas curvilíneas introducen una complicación en el sentido de que los vectores unitarios dependen del tiempo en contraste con el sistema de coordenadas cartesianas donde los vectores unitarios\((\mathbf{\hat{i}},\mathbf{\hat{j}}, \mathbf{\hat{k}})\) son independientes y constantes en el tiempo. La introducción de esta dependencia temporal amerita una mayor discusión.
Cada uno de los tres ejes\(q_i\) en los sistemas de coordenadas curvilíneas se puede expresar en coordenadas cartesianas\((x, y, z)\) como superficies de constante\(q_i\) dada por la función
\[q_i = f_i (x, y, z) \label{C.5}\]
donde\(i = 1\),\(2\), o\(3\). Un elemento de longitud\(ds_i\) perpendicular a la superficie\(q_i\) es la distancia entre las superficies\(q_i\) y\(q_i + dq_i\) que puede expresarse como
\[ds_i = h_idq_i \label{C.6}\]
donde\(h_i\) es una función de\((q_1, q_2, q_3)\). En coordenadas cartesianas\(h_1\),\(h_2\), y\(h_3\) son todos unidad. Los vectores de longitud unitaria\(\hat{q}_1\),\(\hat{q}_2\),\(\hat{q}_3\), son perpendiculares a las respectivas\(q_1\),\(q_2\),\(q_3\) superficies, y están orientados para tener índices crecientes tales que\(\mathbf{\hat{q}}_1 \times \mathbf{\hat{q}}_2 = \mathbf{\hat{q}}_3\). La correspondencia de las coordenadas curvilíneas, vectores unitarios y coeficientes de transformación con coordenadas cartesianas, polares, cilíndricas y esféricas se da en la Tabla\(\PageIndex{1}\).
| Curvilíneo | \(q_1\) | \(q_2\) | \(q_3\) | \(\mathbf{\hat{q}}_1\) | \(\mathbf{\hat{q}}_2\) | \(\mathbf{\hat{q}}_3\) | \(h_1\) | \(h_2\) | \(h_3\) |
|---|---|---|---|---|---|---|---|---|---|
| Cartesiano | \(x\) | \(y\) | \(z\) | \(\hat{i}\) | \(\hat{j}\) | \(\mathbf{\hat{k}}\) | 1 | 1 | 1 |
| Polar | \(r\) | \(\theta\) | \(\mathbf{\hat{r}}\) | \(\boldsymbol{\hat{\theta}}\) | 1 | \(r\) | |||
| cilíndrico | \(\rho\) | \(\varphi\) | \(z\) | \(\boldsymbol{\hat{\rho}}\) | \(\boldsymbol{\hat{\varphi}}\) | \(\mathbf{\hat{z}}\) | 1 | \(\rho\) | 1 |
| Esférico | \(r\) | \(\theta\) | \(\varphi\) | \(\mathbf{\hat{r}}\) | \(\boldsymbol{\hat{\theta}}\) | \(\boldsymbol{\hat{\varphi}}\) | 1 | \(r\) | \(r\sin\theta\) |
Los elementos diferenciales de distancia y volumen vienen dados por
\[d\mathbf{s} = ds_1\mathbf{\hat{q}}_1 + ds_2\mathbf{\hat{q}}_2 + ds_3\mathbf{\hat{q}}_3 = h_1dq_1\mathbf{\hat{q}}_1 + h_2dq_2\mathbf{\hat{q}}_2 + h_3dq_3\mathbf{\hat{q}}_3 \label{C.7}\]
\[d \tau = ds_1ds_2ds_3 = h_1h_2h_3(dq_1dq_2dq_3) \label{C.8}\]
Estos se evalúan a continuación para las coordenadas polares, cilíndricas y esféricas.
Coordenadas polares bidimensionales\((r, \theta )\)
La complicación e implicaciones de los vectores unitarios dependientes del tiempo se ilustran mejor considerando coordenadas polares bidimensionales, que es el sistema de coordenadas curvilíneas más simple. Las coordenadas polares son un caso especial de coordenadas cilíndricas, cuando\(z\) se mantiene fijo, o un caso especial de sistema de coordenadas esféricas, cuando\(\phi\) se mantiene fijo.
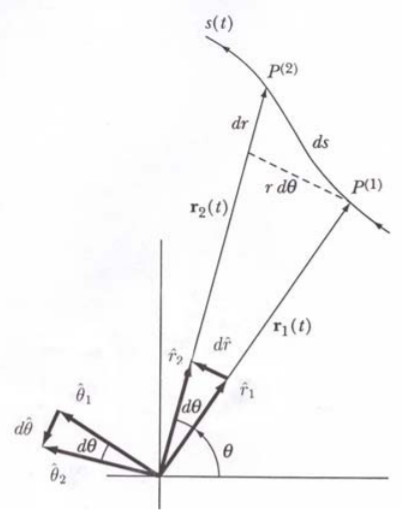
Considere el movimiento de un punto a\(P\) medida que se mueve a lo largo de una curva\(\mathbf{s}(t)\) tal que en el intervalo de tiempo\(dt\) se mueve de\(P^{(1)}\) a\(P^{(2)}\) como se muestra en la Figura\(\PageIndex{1}\). Las coordenadas polares bidimensionales tienen vectores unitarios\(\mathbf{\hat{r}}, \boldsymbol{\hat{\theta}}\), que son ortogonales y cambian de\(\mathbf{\hat{r}}_1, \boldsymbol{\hat{\theta}}_1\), a\(\mathbf{\hat{r}}_2, \boldsymbol{\hat{\theta}}_2\), en el tiempo\(dt\). Tenga en cuenta que para estas coordenadas polares el vector de unidad angular\(\boldsymbol{\hat{\theta}}\) se toma como tangencial a la rotación ya que esta es la dirección de movimiento de un punto en la circunferencia en el radio\(r\).
Los cambios netos que se muestran en la figura de la Tabla\(\PageIndex{2}\) son
\[d\mathbf{\hat{r}} = \mathbf{\hat{r}}_2 − \mathbf{\hat{r}}_1 = d\mathbf{\hat{r}} = |\mathbf{\hat{r}}| d\theta \boldsymbol{\hat{\theta}} =d\theta \boldsymbol{\hat{\theta}} \label{C.9}\]
ya que el vector unitario\(\mathbf{\hat{r}}\) es una constante con\(|\mathbf{\hat{r}}| = 1\). Obsérvese que el infinitossimal\(d\mathbf{\hat{r}}\) es perpendicular al vector\(\mathbf{\hat{r}}\) unitario, es decir,\(d\mathbf{\hat{r}}\) apunta en la dirección tangencial\(\boldsymbol{\hat{\theta}}\).
Del mismo modo, el infinitossimal
\[d\boldsymbol{\hat{\theta}} = \boldsymbol{\hat{\theta}}_2 − \boldsymbol{\hat{\theta}}_1 = d\boldsymbol{\hat{\theta}} = −d\theta \mathbf{\hat{r}} \label{C.10}\]
que es perpendicular al vector\(\boldsymbol{\hat{\theta}}\) unitario tangencial y por lo tanto apunta en la dirección\(−\mathbf{\hat{r}} \). El signo menos hace\(−d\theta \mathbf{\hat{r}}\) que se dirija en la dirección opuesta a\(\mathbf{\hat{r}}\).
El elemento de distancia neta\(d\mathbf{s}\) viene dado por
\[d\mathbf{s} =dr\mathbf{\hat{r}} + rd\mathbf{\hat{r}} =dr\mathbf{\hat{r}} + rd\theta \boldsymbol{\hat{\theta}} \label{C.11}\]
Esto concuerda con la predicción obtenida usando Tabla\(\PageIndex{1}\).
Las derivadas de tiempo de los vectores unitarios vienen dadas por las ecuaciones\ ref {C.9} y\ ref {C.10} para ser,
\[\frac{d\mathbf{\hat{r}}}{ dt} = \frac{d\theta}{ dt} \boldsymbol{\hat{\theta}} \label{C.12}\]
\[\frac{d\boldsymbol{\hat{\theta}}}{ dt} = −\frac{d\theta}{ dt} \mathbf{\hat{r}} \label{C.13}\]
Obsérvese que las derivadas de tiempo de los vectores unitarios son perpendiculares al vector unitario correspondiente, y los vectores unitarios están acoplados.
Considera que la velocidad\(\mathbf{v}\) se expresa como
\[\mathbf{v} = \frac{d\mathbf{r}}{ dt} = \frac{d}{ dt}(r\mathbf{\hat{r}}) = \frac{dr}{ dt}\mathbf{\hat{r}} + r \frac{d\mathbf{\hat{r}} }{dt} = \dot{r}\mathbf{\hat{r}} + r \dot{\theta} \boldsymbol{\hat{\theta}} \label{C.14}\]
La velocidad se resuelve en una componente radial\(\dot{r}\) y una componente angular, transversal\(r \dot{\theta} \).
Del mismo modo la aceleración viene dada por
\[\mathbf{a} = \frac{d\mathbf{v}}{ dt} = \frac{d\dot{r} }{dt} \mathbf{\hat{r}}+\dot{r} \frac{d\mathbf{\hat{r}}}{ dt} + \frac{dr}{ dt} \dot{\theta} \boldsymbol{\hat{\theta}}+ r \frac{d\dot{\theta} }{dt} \boldsymbol{\hat{\theta}}+r \dot{\theta} \frac{d\boldsymbol{\hat{\theta}}}{ dt} \\ = \left( \ddot{r}− r \dot{\theta}^2\right) \mathbf{\hat{r}} + \left( \ddot{r}\theta + 2\dot{r} \dot{\theta} \right) \boldsymbol{\hat{\theta}} \label{C.15}\]
donde el\(r \dot{\theta}^2 \mathbf{\hat{r}}\) término es la aceleración centrípeta efectiva mientras que el\(2\dot{r} \dot{\theta} \boldsymbol{\hat{\theta}}\) término se denomina término Coriolis. Para el caso cuando\(\dot{r} = \ddot{r} = 0\), entonces el primer corchete en\ ref {C.15} es la aceleración centrípeta mientras que el segundo corchete es la aceleración tangencial.
Esta discusión ha demostrado que en contraste con la independencia de tiempo de los vectores de base de unidad cartesiana, los vectores de base unitaria para coordenadas curvilíneas dependen del tiempo, lo que conduce a componentes de la velocidad y aceleración que involucran coordenadas acopladas.
| Coordenadas | \(r, \theta\) |
| Elemento de distancia | \(d\mathbf{s} = dr\mathbf{\hat{r}} + rd\theta \boldsymbol{\hat{\theta}}\) |
| Elemento de área | \(da = r dr d\theta\) |
| Vectores unitarios |
\(\mathbf{\hat{r}} = \hat{i} \cos \theta + \hat{j} \sin \theta\) \(\boldsymbol{\hat{\theta}} = -\hat{i} \sin \theta + \hat{j} \cos \theta\) |
| Derivadas de tiempo de vectores unitarios |
\(\frac{d\mathbf{\hat{r}}}{dt} = \dot{\theta} \boldsymbol{\hat{\theta}}\) \(\frac{d\boldsymbol{\hat{\theta}}}{dt} = -\dot{\theta} \mathbf{\hat{r}} \) |
| Velocity | \(\mathbf{v} = \dot{r}\mathbf{\hat{r}} + r\dot{\theta} \boldsymbol{\hat{\theta}}\) |
| Energía cinética | \(\frac{m}{2} \left(\dot{r}^2 + r^2 \dot{\theta}^2\right)\) |
| Aceleración | \(\mathbf{a} = \left(\ddot{r} - r \dot{\theta}^2\right)\mathbf{\hat{r}} + \left(r\ddot{\theta} + 2\dot{r}\dot{\theta}\right) \boldsymbol{\hat{\theta}}\) |
Coordenadas cilíndricas\((\rho , \phi , z)\)
\((\rho , \phi , z)\)Las coordenadas cilíndricas tridimensionales se obtienen agregando el movimiento a lo largo del eje de simetría\(\mathbf{\hat{z}}\) al caso para coordenadas polares. Los vectores de base unitaria se muestran en la Tabla\(\PageIndex{3}\) donde el vector de unidad angular\(\boldsymbol{\hat{\phi}}\) se toma como tangencial correspondiente a la dirección que se movería un punto en la circunferencia. Los elementos de distancia y volumen, los componentes de coordenadas cartesianas de los vectores de base unitarios cilíndricos y las derivadas de tiempo del vector unitario se muestran en la Tabla\(\PageIndex{3}\). La dependencia del tiempo de los vectores unitarios se utiliza para derivar la aceleración. En cuanto a las coordenadas polares bidimensionales, los componentes\(\boldsymbol{\hat{\rho}}\) y de\(\boldsymbol{\hat{\theta}}\) dirección de la aceleración para coordenadas cilíndricas son funciones acopladas de\(\rho \)\(\dot{\rho}\),\(\ddot{\rho} \),\(\dot{\phi}\), y\(\ddot{\phi}\).
| Coordenadas | \(\rho, \phi, \theta\) |
| Elemento de distancia | \(d\mathbf{s} = d \rho \boldsymbol{\hat{\rho}} + \rho d\phi \boldsymbol{\hat{\phi}} + dz\mathbf{\hat{z}}\) |
| Elemento de volumen | \(dv = \rho d\rho d\phi dz\) |
| Vectores unitarios |
\(\boldsymbol{\hat{\rho}} = \hat{i} \cos \phi + \hat{j} \sin \phi\) \(\boldsymbol{\hat{\phi}} = -\hat{i} \sin \phi + \hat{j} \cos \phi\) \(\mathbf{\hat{z}} = \mathbf{\hat{k}}\) |
| Derivadas de tiempo de vectores unitarios |
\(\frac{d\boldsymbol{\hat{\rho}}}{dt} = \dot{\phi} \boldsymbol{\hat{\phi}} \) \(\frac{d\boldsymbol{\hat{\phi}}}{dt} = -\dot{\phi} \boldsymbol{\hat{\rho}} \) \(\frac{d\mathbf{\hat{z}}}{dt} = 0\) |
| Velocity | \(\mathbf{v} = \dot{\rho} \boldsymbol{\hat{\rho}} + \rho \dot{\phi} \boldsymbol{\hat{\phi}} + \dot{z} \mathbf{\hat{z}}\) |
| Energía cinética | \(\frac{m}{2} \left(\dot{\rho}^2 + \rho^2 \dot{\phi}^2 + \dot{z}^2 \right)\) |
| Aceleración | \(\mathbf{a} = \left(\ddot{\rho} - \rho \dot{\phi}^2\right)\boldsymbol{\hat{\rho}} + \left(\rho\ddot{\phi} + 2\dot{\rho}\dot{\phi}\right) \boldsymbol{\hat{\phi}} + \ddot{z}\mathbf{\hat{z}}\) |

Coordenadas esféricas\((r, \theta , \phi )\)
Las coordenadas esféricas tridimensionales, se pueden tratar de la misma manera que para las coordenadas cilíndricas. Los vectores de base unitaria se muestran en la Tabla\(\PageIndex{4}\) donde los vectores unitarios angulares\(\boldsymbol{\hat{\theta}}\) y se\(\boldsymbol{\hat{\phi}}\) toman como tangenciales correspondientes a la dirección que un punto en la circunferencia se mueve para un ángulo de rotación positivo.
| Coordenadas | \(r, \theta, \phi \) |
| Elemento de distancia | \(ds = dr\mathbf{\hat{r}} + rd\theta \boldsymbol{\hat{\theta}} + r \sin \theta d \phi \boldsymbol{\hat{\phi}}\) |
| Elemento de volumen | \(dv = r^2 \sin \theta drd\theta d\phi\) |
| Vectores unitarios |
\(\mathbf{\hat{r}} = \hat{i} \sin \theta \cos \phi + \hat{j} \sin \theta \cos \phi + \mathbf{\hat{k}} \cos \theta\) \(\boldsymbol{\hat{\theta}} = \hat{i} \cos \theta \cos \phi + \hat{j} \cos \theta \sin \phi - \mathbf{\hat{k}} \sin \theta\) \(\boldsymbol{\hat{\phi}} = -\hat{i} \sin \phi + \hat{j} \cos \phi\) |
| Derivadas de tiempo de vectores unitarios |
\(\frac{d\mathbf{\hat{r}}}{dt} = \boldsymbol{\hat{\theta}} \dot{\theta} + \boldsymbol{\hat{\phi}} \dot{\phi} \sin \theta \) \(\frac{d\boldsymbol{\hat{\theta}}}{dt} = -\mathbf{\hat{r}} \dot{\theta} + \boldsymbol{\hat{\phi}} \dot{\phi} \cos \theta \) \(\frac{d\boldsymbol{\hat{\phi}}}{dt} = -\mathbf{\hat{r}}\dot{\phi}\sin \theta - \boldsymbol{\hat{\theta}} \dot{\phi} \cos \theta \) |
| Velocity | \(\mathbf{v} = \dot{r}\mathbf{\hat{r}} + r\dot{\theta} \boldsymbol{\hat{\theta}} + r \dot{\phi} \sin \theta \boldsymbol{\hat{\phi}}\) |
| Energía cinética | \(\frac{m}{2} \left(\dot{r}^2 + r^2 \dot{\theta}^2 + r^2\sin^2 \theta \dot{\phi}^2 \right)\) |
| Aceleración |
\(\mathbf{a} = \left(\ddot{r} - r \dot{\theta}^2 - r\dot{\phi}^2 \sin^2 \theta \right)\mathbf{\hat{r}} + \left(r\ddot{\theta} + 2\dot{r}\dot{\theta} - r\dot{\phi}^2 \sin \theta \cos \theta \right) \boldsymbol{\hat{\theta}} + \left(r \ddot{\phi} \sin \theta + 2\dot{r}\dot{\phi} \sin \theta + 2r\dot{\theta}\dot{\phi} \cos \theta \right) \boldsymbol{\hat{\phi}} \) |

Los elementos de distancia y volumen, los componentes de coordenadas cartesianas de los vectores de base de unidad esférica y las derivadas de tiempo de vector unitario se muestran en la tabla dada en la Figura\(\PageIndex{3}\). La dependencia del tiempo de los vectores unitarios se utiliza para derivar la aceleración. En cuanto al caso de las coordenadas cilíndricas\(\mathbf{\hat{r}}\)\(\boldsymbol{\hat{\theta}}\), los\(\boldsymbol{\hat{\phi}}\) componentes y componentes de la aceleración implican el acoplamiento de las coordenadas y sus derivadas de tiempo.
Es importante señalar que los vectores de unidad angular\(\boldsymbol{\hat{\theta}}\) y\(\boldsymbol{\hat{\phi}}\) se toman para ser tangenciales a los círculos de rotación. Sin embargo, para la discusión de la velocidad angular del momento angular es más conveniente utilizar los ejes de rotación definidos por\(\mathbf{\hat{r}} \times \boldsymbol{\hat{\theta}}\) y\(\mathbf{\hat{r}} \times \boldsymbol{\hat{\phi}}\) para especificar las propiedades del vector que es perpendicular a los vectores unitarios\(\boldsymbol{\hat{\theta}}\) y\(\boldsymbol{\hat{\phi}}\). Tenga cuidado de no confundir los vectores unitarios\(\boldsymbol{\hat{\theta}}\) y\(\boldsymbol{\hat{\phi}}\) con los utilizados para las velocidades angulares\(\dot{\theta}\) y\(\dot{\phi}\).
Coordenadas de Frenet-Serret
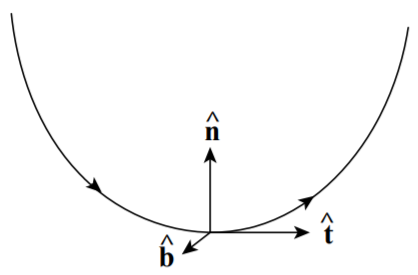
Los sistemas de coordenadas curvilíneas cartesianas, polares, cilíndricas o esféricas, todos son sistemas de coordenadas ortogonales que se fijan en el espacio. Hay situaciones en las que es más conveniente utilizar las coordenadas Frenet-Serret que comprenden un sistema de coordenadas ortogonales que se fija a la partícula que se mueve a lo largo de una trayectoria continua, diferenciable, en el espacio euclidiano tridimensional. Let\(s(t)\) representa una longitud de arco monótonamente creciente a lo largo de la trayectoria del movimiento de la partícula en función del tiempo\(t\). Las coordenadas Frenet-Serret, mostradas en la Figura\(\PageIndex{4}\), son los tres vectores unitarios ortogonales instantáneos\(\mathbf{\hat{t}}\)\(\mathbf{\hat{n}}\), y\(\mathbf{\hat{b}}\) donde el vector unitario tangente\(\mathbf{\hat{t}}\) es la tangente instantánea a la curva, el vector unitario normal\(\mathbf{\hat{n}}\) se encuentra en el plano de curvatura del trayectoria que apunta hacia el centro del radio de curvatura instantáneo y es perpendicular al vector unitario tangente\(\mathbf{\hat{t}}\), mientras que el vector unitario binormal es el\(\mathbf{\hat{b}} =\mathbf{\hat{t}} \times \mathbf{\hat{n}}\) que es la perpendicular al plano de curvatura y es mutuamente perpendicular a los otros dos vectores unitarios Francés-Serrat . Los vectores unitarios Frenet-Serret están definidos por las relaciones
\[\frac{d\mathbf{\hat{t}}}{ ds} = \kappa \mathbf{\hat{n}} \label{C.16}\]
\[\frac{d\mathbf{\hat{b}}}{ ds} = − \tau \mathbf{\hat{n}} \label{C.17}\]
\[\frac{d\mathbf{\hat{n}}}{ ds} = −\kappa \mathbf{\hat{t}}+ \tau \mathbf{\hat{b}} \label{C.18}\]
La curvatura\(\kappa = \frac{1}{ \rho}\) donde\(\rho\) es el radio de curvatura y\(\tau\) es la torsión que puede ser positiva o negativa. Para aumentar\(s\), una curvatura distinta de cero\(\kappa\) implica que la tríada de vectores unitarios rotan en un sentido diestro alrededor\(\mathbf{\hat{b}}\). Si la torsión\(\tau\) es positiva (negativa) la tríada de vectores unitarios gira en sentido derecho (izquierdo) alrededor\(\mathbf{\hat{t}}\).
| Elemento de distancia | \(d\mathbf{s}(t) = \mathbf{\hat{t}} \left| \frac{d\mathbf{r}(t)}{dt} \right| dt = \mathbf{\hat{t}} v(t) dt\) |
| Vectores unitarios |
\(\mathbf{\hat{t}}(t) = \frac{\mathbf{v}(t)}{ \left| v(t) \right|}\) \(\mathbf{\hat{n}}(t) = \frac{d\mathbf{\hat{t}}/dt}{\left| \mathbf{d\hat{t}}/dt \right|}\) \(\mathbf{\hat{b}} (t) = \mathbf{\hat{t}} \times \mathbf{\hat{n}}\) |
| Derivadas de tiempo de vectores unitarios | \ (\ frac {d} {d t}\ begin {pmatrix} \ mathbf {\ hat {t}}\ \ mathbf {\ hat {n}}\ \ mathbf {\ hat {b}} \ end {pmatrix} =|v|\ begin {pmatrix} 0 &\ kappa & 0\\ -\ kappa & 0 &\ tau\\ 0 & -\ tau & 0 \ end {pmatrix}\ begin {pmatrix} \ mathbf {\ hat {t}}\ \\ mathbf {\ hat {n}}\ \ mathbf {\ hat {b}} \ end { pmatrix}\) |
| Velocity | \(\mathbf{v} (t) = \frac{d\mathbf{r}(t)}{dt}\) |
| Aceleración | \(\mathbf{a}(t) = \frac{dv}{dt} \mathbf{\hat{t}} + \kappa v^2 \mathbf{\hat{n}}\) |
Las ecuaciones anteriores también se pueden reescribir en la forma usando un nuevo vector de rotación unitaria\(\boldsymbol{\omega}\) donde
\[\boldsymbol{\omega}= \tau \mathbf{\hat{t}}+\kappa \mathbf{\hat{b}} \label{C.19}\]
Entonces las ecuaciones\ ref {C.16} −\ ref {C.18} se transforman en
\[\frac{d\mathbf{\hat{t}}}{ ds} = \boldsymbol{\omega} \times \mathbf{\hat{t}} \label{C.20}\]
\[\frac{d\mathbf{\hat{n}}}{ ds} = \boldsymbol{\omega} \times \mathbf{\hat{n}} \label{C.21}\]
\[\frac{d\mathbf{\hat{b}}}{ ds} = \boldsymbol{\omega} \times \mathbf{\hat{b}} \label{C.22}\]
En general, los vectores unitarios Frenet-Serret dependen del tiempo. Si la curvatura\(\kappa = 0\) entonces la curva es una línea recta y\(\mathbf{\hat{n}}\) y no\(\mathbf{\hat{b}}\) están bien definidas. Si la torsión es cero entonces la trayectoria se encuentra en un plano. Tenga en cuenta que una hélice tiene curvatura constante y torsión constante.
La tasa de cambio de un campo vectorial general\(\mathbf{E}\) a lo largo de la trayectoria se puede escribir como
\[\frac{d\mathbf{E}}{ds} = \left( \frac{dE_t}{ ds} \mathbf{\hat{t}} + \frac{dE_n }{ds} \mathbf{\hat{n}}+ \frac{dE_b }{ds} \mathbf{\hat{b}} \right) + \boldsymbol{\omega} \times \mathbf{E} \label{C.23}\]
Las coordenadas Frenet-Serret se utilizan en las ciencias de la vida para describir el movimiento de un organismo en movimiento en un medio viscoso. Las coordenadas Frenet-Serret también tienen aplicaciones a la Relatividad General.
Problemas
1. El objetivo de este problema es ayudarte a entender el origen de las ecuaciones que relacionan dos sistemas de coordenadas diferentes. Consulte diagramas para coordenadas cilíndricas y esféricas mientras su asistente de enseñanza explica cómo llegar a expresiones para\(x_1\)\(x_2\), y\(x_3\) en términos de\(\rho \)\(\phi \),\(z\) y cómo derivar expresiones para los vectores de velocidad y aceleración en cilíndrico coordenadas. Ahora trata de relacionar sistemas de coordenadas esféricas y rectangulares. Su grupo debe derivar expresiones que relacionen las coordenadas de los dos sistemas, expresiones que relacionan los vectores unitarios y sus derivadas de tiempo de los dos sistemas, y finalmente, expresiones para la velocidad y aceleración en coordenadas esféricas.