
4.4: Funciones propias orbitales en 3-D
- Page ID
- 126864

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Los operadores de momento angular en coordenadas polares esféricas
El operador de momento angular
\[\vec{L}=\vec{r}\times\vec{p}=-i\hbar\vec{r}\times\vec{\nabla}.\]
En coordenadas polares esféricas,
\[ \begin{matrix} x=r\sin\theta\cos\phi \\ y=r\sin\theta\sin\phi \\ z=r\cos\theta \\ ds^2=dr^2+r^2d\theta^2+r^2\sin^2\theta d\phi^2 \end{matrix}\label{4.4.1}\]
el operador de gradiente es
\[ \vec{\nabla}=\hat{r}\dfrac{\partial}{\partial r}+\hat{\theta}\dfrac{1}{r}\dfrac{\partial}{\partial \theta}+\hat{\phi}\dfrac{1}{r\sin\theta}\dfrac{\partial}{\partial \phi} \label{4.4.2}\]
donde ahora los sombreritos denotan vectores unitarios:\(\hat{r}\) es radialmente hacia afuera,\(\hat{\theta}\) apunta a lo largo de una línea de longitud alejada del polo norte (y por lo tanto en la dirección del aumento\(\theta\)) y\(\hat{\phi}\) apunta a lo largo de una línea de latitud en un sentido antihorario dirección como se ve mirando hacia abajo en el polo norte (es decir, en la dirección de aumentar\(\phi\)).
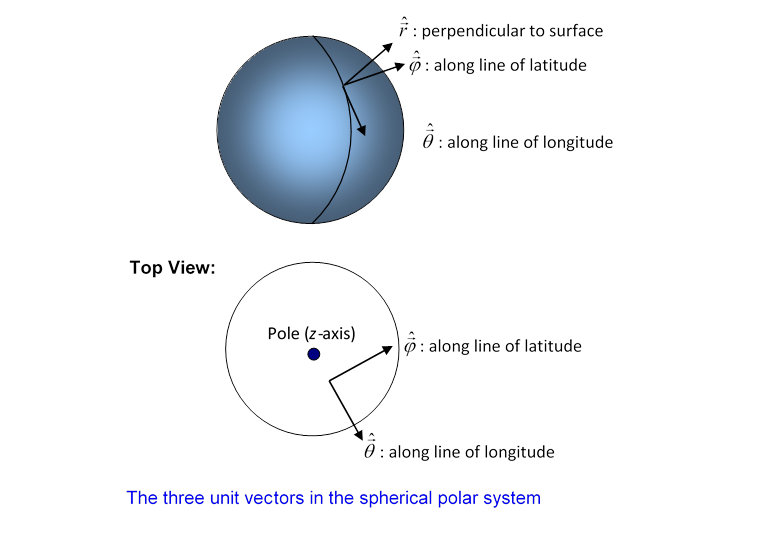
Aquí\(\hat{r},\hat{\theta},\hat{\phi}\) forman una base local ortonormal, y
\[ \hat{r}\times\hat{\theta}=\hat{\phi}, \;\; \hat{r}\times\hat{\phi}=-\hat{\theta} \label{4.4.3}\]
como debe quedar claro en el diagrama.
Entonces
\[ \vec{r}\times\vec{\nabla}=\hat{\phi}\dfrac{\partial}{\partial \theta}-\hat{\theta}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial \phi} \label{4.4.4}\]
(De manera explícita,\(\hat{\phi}=(-\sin\phi,\cos\phi,0)\) y\(\hat{\theta}=(\cos\theta\cos\phi, \cos\theta\sin\phi,-\sin\theta)\).)
El vector\(\hat{\phi}\) tiene componente cero en la dirección z, el vector\(\hat{\theta}\) tiene componente\(-\sin\theta\) en la dirección z, por lo que podemos concluir inmediatamente que
\[ L_z=(\vec{r}\times\vec{p})_z=-(i\hbar\vec{r}\times\vec{\nabla})_z=-i\hbar\dfrac{\partial}{\partial \phi} \label{4.4.5}\]
al igual que en el caso bidimensional.
El operador\[ L^2=-\hbar^2\left( \hat{\phi}\dfrac{\partial}{\partial \theta}-\hat{\theta}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial \phi} \right) \cdot \left( \hat{\phi}\dfrac{\partial}{\partial \theta}-\hat{\theta}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial \phi} \right). \label{4.4.6}\]
Para evaluar esta expresión, usamos\(\hat{\phi^2}=1,\; \hat{\theta^2}=1,\; \hat{\phi}\cdot\hat{\theta}=0\) pero también debemos verificar los efectos de los operadores diferenciales en la primera expresión sobre las variables en la segunda, incluyendo los vectores unitarios.
A partir de las expresiones de coordenadas explícitas para los vectores unitarios, o mirando el diagrama, debería poder establecer lo siguiente:\(\partial\hat{\phi}/\partial\theta=0, \; \partial\hat{\theta}/\partial\theta\) está en la dirección r,\(\partial\hat{\phi}/\partial\phi\) es un vector unitario horizontal apuntando hacia adentro perpendicular a\(\hat{\phi}\), y teniendo componente\(-\cos\theta\) en la\(\hat{\theta}\) -dirección,\(\partial\hat{\theta}/\partial\phi=\hat{\phi}\cos\theta\).
Por lo tanto, el único término “diferenciación de un vector unitario” al que contribuye\(L^2\) es
\[ \hbar^2\hat{\theta}\dfrac{1}{\sin\theta}\cdot\dfrac{\partial\hat{\phi}}{\partial \phi}\dfrac{\partial}{\partial \theta}=-\hbar^2\cot\theta\dfrac{\partial}{\partial \theta}. \label{4.4.7}\]
El\(\hat{\phi}\dfrac{\partial}{\partial \theta}\) actuar sobre el\(\sin\theta\) in no\(-\hat{\theta}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial\phi}\) aporta nada porque\(\hat{\phi}\cdot\hat{\theta}=0\).
De ahí
\[ \begin{matrix} L^2=-\hbar^2\left( \dfrac{\partial^2}{\partial\theta^2}+\cot\theta\dfrac{\partial}{\partial\theta}+\dfrac{1}{\sin^2\theta}\dfrac{\partial^2}{\partial\phi^2} \right) \\ =-\hbar^2\left( \dfrac{1}{\sin\theta}\dfrac{\partial}{\partial\theta}\sin\theta\dfrac{\partial}{\partial\theta}+\dfrac{1}{\sin^2\theta}\dfrac{\partial^2}{\partial\phi^2} \right) \end{matrix} \label{4.4.8}\]
Ahora bien, lo sabemos\(L^2\) y\(L_z\) tenemos un conjunto común de eigenkets (ya que se desplazan) y ya hemos establecido que los de\(L_z\) son\(\Phi_m(\phi)=e^{im\phi}/\sqrt{2\pi}\), con\(m\) un entero, entonces los eigenkets de\(L^2\) deben tener esta misma\(f\) dependencia, por lo que deben ser de la forma\(\Theta^m_l(\theta)\Phi(\phi)\), donde\(\Theta^m_l(\theta)\) es una solución (normalizada adecuadamente) de la ecuación
\[ \dfrac{1}{\sin\theta}\dfrac{d}{d\theta}\sin\theta\dfrac{d\Theta^m_l(\theta)}{d\theta}-\dfrac{m^2}{\sin^2\theta}\Theta^m_l(\theta)=-l(l+1)\Theta^m_l(\theta) \label{4.4.9}\]
escrito más convenientemente\[ \sin\theta\dfrac{d}{d\theta}\sin\theta\dfrac{d\Theta^m_l(\theta)}{d\theta}+(l(l+1)\sin^2\theta-m^2)\Theta^m_l(\theta)=0. \label{4.4.10}\]
Para resumir: las soluciones a esta ecuación diferencial, con entero\(l,\; m,\; |m|\le l,\) darán (junto con\(\Phi_m(\phi)\)) el conjunto completo de autoestados de\(L^2\),\(L_z\) en la representación de coordenadas.
Encontrar el m = l Eigenket de\(L^2\), \(L_z\)
Recordemos ahora que para el oscilador armónico simple, la función de onda más fácil de encontrar fue la del estado fundamental, la solución de la ecuación lineal simple\(\hat{a}\Psi_0=0\) (además de ser una solución de la ecuación cuadrática de Schrödinger, por supuesto). Las otras funciones de onda de estado podrían entonces ser encontradas aplicando el operador de creación en forma diferencial el número necesario de veces.
Aquí funciona una estrategia similar: podemos encontrar fácilmente el estado más alto en la\(l\) escalera\(m = l\),, el estado\(|l,l\rangle\), ya que satisface la ecuación lineal\(L_+|l,l\rangle=0\), donde\(L_+=L_x+iL_y\). Solo necesitamos lanzar esta ecuación en forma de coordenadas. En coordenadas cartesianas\(L_+=-i\hbar(\hat{r}\times\vec{\nabla})_+\),, y ya hemos demostrado que
\[ \vec{r}\times\vec{\nabla}=\hat{\phi}\dfrac{\partial}{\partial \theta}-\hat{\theta}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial \phi}. \label{4.4.10B}\]
Por lo tanto\[ (\vec{r}\times\vec{\nabla})_+=\hat{\phi_+}\dfrac{\partial}{\partial \theta}-\hat{\theta_+}\dfrac{1}{\sin\theta}\dfrac{\partial}{\partial \phi}, \label{4.4.11}\]
y usando\(\hat{\phi}=(-\sin\phi,\cos\phi,0)\),\(\hat{\theta}=(\cos\theta\cos\phi, \cos\theta\sin\phi,-\sin\theta\) vemos que\(\hat{\theta_+}\), el componente de\(\hat{\theta}\) en la dirección +, es\(\phi_+=\phi_x+i\phi_y=ie^{i\phi}\), y de manera similar\(\hat{\theta_+}=\cos\theta e^{i\phi}\).
Entonces\[ \begin{matrix} L_+=\hbar e^{i\phi}\left( \dfrac{\partial}{\partial\theta}+i\cot\theta\dfrac{\partial}{\partial\phi}\right) \\ L_-=-\hbar e^{-i\phi}\left( \dfrac{\partial}{\partial\theta}-i\cot\theta\dfrac{\partial}{\partial\phi}\right) \end{matrix}\label{4.4.12}\]
y\(L_+|l,l\rangle=0\) se convierte\[ \left( \dfrac{\partial}{\partial\theta}+i\cot\theta\dfrac{\partial}{\partial\phi}\right) \Theta^l_l(\theta)e^{il\phi}=0 \label{4.4.13}\]
Es decir,\[ \left( \dfrac{d}{d\theta}-l\cot\theta\right) \Theta^l_l(\theta)=0 \label{4.4.14}\]
La solución a esta ecuación es\[ \Theta^l_l(\theta)=N(\sin\theta)^l \label{4.4.15}\]
donde\(N\) está la constante de normalización. Las funciones de\(m\neq l\) onda se generan aplicando el operador de bajada\(L_-\).
Normalizando el m = l Eigenket
La notación estándar para los eigenkets normalizados\(|l,m\rangle\) es\(Y^m_l(\theta,\phi)=\Theta^m_l(\theta)\Phi_m(\phi)\). Estas funciones, al ser eigenkets de operadores hermitianos con diferentes valores propios, deben satisfacer\[ \int^{\pi}_{\theta=0}\int^{2\pi}_{\phi=0} Y^{m'^{*}}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)\sin\theta d\theta d\phi=\int Y^{m'^*}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)d\Omega=\delta_{l'l}\delta_{m'm} \; . \label{4.4.16}\]
Entonces, nuestro primer trabajo es normalizar\(\Theta^l_l(\theta)=N(\sin\theta)^l\) (tomando\(\Phi_l(\phi)=e^{il\phi}/\sqrt{2\pi}\) ya normalizado)\[ |N|^2\int^{\pi}_0 (\sin\theta)^{2l+1}d\theta=1 \label{4.4.17}\]
La integral se puede evaluar usando la sustitución\(\mu=\cos\theta\) para dar\(\int^1_{-1}(1-\mu^2)^l d\mu\), luego haciendo la sustitución adicional\(u=\dfrac{1}{2}(1-\mu)\) para dar\(2^{2l+1}\int^1_0 u^l(1-u)^l du\), que se puede integrar por partes para dar\[ |N|^2 2^{2l+1}(l!)^2/(2l+1)!=1. \label{4.4.18}\]
Por lo tanto\[ Y^l_l(\theta,\phi)=(-1)^l \left( \dfrac{(2l+1)!}{4\pi}\right)^{1/2}\dfrac{1}{2^l l!}(\sin\theta)^l e^{il\phi}=c_l(\sin\theta)^l e^{il\phi} \label{4.4.19}\]
donde hemos fijado el signo de acuerdo con la convención estándar, y vamos a denotar la constante de normalización bastante engorrosa por\(c_l\).
Observe que para valores grandes de\(l\), esta función está fuertemente ponderada alrededor del ecuador, como esperaríamos — para un momento angular total dado se obtiene un componente máximo en la dirección z cuando el movimiento se concentra en el plano x, y. Esto parece una órbita de Bohr.
Encontrar el resto de los Eigenkets: los detalles
Ahora que\(|l,l\rangle\) está normalizado, podemos producir automáticamente normalizados\(|l,m\rangle\) correctamente, ya que conocemos el elemento matriz del operador de bajada entre estados normalizados. No tenemos que hacer más integrales.
Por ejemplo,\(L_-|l,l\rangle=\hbar\sqrt{2l}|l,l-1\rangle\), equivalentemente (los\(\hbar\)'s por supuesto cancelan)\[ Y^{l-1}_l(\theta,\phi)=\dfrac{(-1)}{\sqrt{2l}}e^{-i\phi}\left( \dfrac{\partial}{\partial\theta}-i\cot\theta\dfrac{\partial}{\partial\phi}\right) Y^l_l . \label{4.4.20}\]
Es decir,\[ \begin{matrix} Y^{l-1}_l(\theta,\phi)=c_l e^{-i\phi}\left( \dfrac{\partial}{\partial\theta}-i\cot\theta\dfrac{\partial}{\partial\phi}\right) \sin^l\theta\cdot e^{il\phi} \\ =-c_l e^{i(l-1)\phi}\sqrt{2l}\sin^{l-1}\theta\cos\theta \end{matrix}\label{4.4.21}\]
(ambos términos dando contribuciones iguales).
Tenga en cuenta que esta función es en realidad cero en el ecuador, pero para grandes\(l\) alcanza su punto máximo cerca del ecuador (en ambos lados).
En principio, podemos volver a aplicar este operador diferencial una y otra vez para generar todos los\(|l,m\rangle\) estados, pero esto se vuelve muy desordenado. Sin embargo, hay un teorema ordenado sobre el operador de descenso que lo hace todo sencillo:\[ L_-e^{im\phi}f(\theta)=e^{i(m-1)\phi}\left( \sin^{1-m}\theta\dfrac{d}{d(\cos\theta)}\sin^m\theta \right) f(\theta) \label{4.4.22}\]
Ejercicio: probarlo.
Entonces\[ L_-e^{il\phi}\sin^l\theta=e^{i(l-1)\phi}\left( \sin^{1-l}\theta\dfrac{d}{d(\cos\theta)}\sin^l\theta \right) \sin^l(\theta) \label{4.4.23}\]
y aplicar de nuevo al operador,\[ \begin{matrix} (L_-)^2e^{il\phi}\sin^l\theta=L_-e^{i(l-1)\phi}\left( \sin^{1-l}\theta\dfrac{d}{d(\cos\theta)}\sin^l\theta \right) \sin^l(\theta) \\ =e^{i(l-2)\phi}\left( \sin^{2-l}\theta\dfrac{d}{d(\cos\theta)}\sin^{l-1}\theta \right) \cdot\left( \sin^{1-l}\theta\dfrac{d}{d(\cos\theta)}\sin^l\theta \right) \sin^l(\theta) \\ =e^{i(l-2)\phi}\left( \sin^{2-l}\theta\dfrac{d^2}{d^2(\cos\theta)}\sin^l\theta \right) \sin^l(\theta). \end{matrix} \label{4.4.23}\]
Entonces, el punto de introducir esta representación de aspecto impar del operador bajante es que el\(\sin^{1-l}\theta\) término en el medio se cancela exactamente cuando el operador se aplica dos veces, y cancelaciones similares ocurren al repetir la operación, dando la representación (relativamente) simple: \[ Y^m_l(\theta,\phi)=c_l\sqrt{\dfrac{(l+m)!}{(2l)!(l-m)!}}e^{im\phi}\sin^{-m}\theta\dfrac{d^{l-m}}{d(\cos\theta)^{l-m}}\sin^{2l}\theta \label{4.4.24}\]
(¿De dónde salieron todas esas factoriales? Son el producto de todos los factores de raíz cuadrada inversa en\[ |l,m-1\rangle=\dfrac{1}{\sqrt{(l+m)(l-m+1)}}L_-|l,m\rangle \label{4.4.25}\]
para el número de bajadas necesarias.)
Tenga en cuenta que para\(m = 0\) la función es\[ Y^0_l(\theta,\phi)=c_l\sqrt{\dfrac{1}{(2l)!}}\dfrac{d^l}{d(\cos\theta)^l}\sin^{2l}\theta, \label{4.4.26}\]
y de hecho no es una función de\(\phi\) en absoluto. Esto no es sorprendente, ya que tiene un momento angular cero sobre la dirección z, lo apropiado\(\Phi(\phi)\) es simplemente constante.
Porque\(m=-l\), la diferenciación se vuelve trivial, porque, la escritura\(\cos\theta=\mu\), la diferenciación se vuelve\(\dfrac{d^{2l}}{d\mu^{2l}}(1-\mu^2)^l\) y sólo el\(\mu^{2l}\) término sobrevive, dando\[ Y^{-l}_l(\theta,\phi)=(-1)^l c_l e^{-il\phi} \sin^l\theta . \label{4.4.27}\]
Por supuesto, esto también podría haberse encontrado a partir de la ecuación lineal\(L_-|l,-l\rangle=0\), y podríamos haber generado por igual todos los estados aplicando\(L_+\) a este estado. De hecho, esto da una expresión diferente —pero por supuesto equivalente— para\(Y^m_l(\theta,\phi)\):\[ Y^m_l(\theta,\phi)=(-1)^m c_l \sqrt{\dfrac{(l-m)!}{(2l)!(l+m)!}}e^{im\phi}\sin^{m}\theta\dfrac{d^{l+m}}{d(\cos\theta)^{l+m}}\sin^{2l}\theta \label{4.4.28}\]
(de Mesías, página 522).
Relacionar las Y l m's con las Funciones de Legendre
Los polinomios de Legendre\(P_n(\cos\theta)\) se definen por:\[ \begin{matrix} P_n(\cos\theta)=\dfrac{1}{2^n n!}\dfrac{d^n}{d(\cos\theta)^n}\sin^{2n}\theta, \; or\; \\ P_n(\mu)=\dfrac{1}{2^n n!}\dfrac{d^n}{d\mu^n}(1-\mu^2)^n \end{matrix}\label{4.4.29}\]
donde\(\mu=\cos\theta\), entonces\(d\mu=-\sin\theta d\theta\). A partir de esta forma, es fácil demostrar que\(P_n(1)=1\) (todas\(n\) las diferenciaciones deben sacar un\((1-\mu^2)\) factor para dar una contribución distinta de cero), y\(P_n(\mu)\) deben tener\(n\) ceros en el intervalo (-1, 1). \(P_n(\mu)\)alterna entre una función par y una función impar.
La normalización de los\(P_n(\mu)\)'s es\[ \begin{matrix} \int^1_{-1} (P_n(\mu))^2 d\mu=\left( \dfrac{1}{2^n n!}\right)^2 \int^1_{-1} \dfrac{d^n}{d\mu^n}(\mu^2-1)^n\dfrac{d^n}{d\mu^n}(\mu^2-1)^n d\mu \\ =(-1)^n\left( \dfrac{1}{2^n n!}\right)^2 \int^1_{-1} (\mu^2-1)^n\dfrac{d^{2n}}{d\mu^{2n}}(\mu^2-1)^n d\mu \\ =(2n)! \left( \dfrac{1}{2^n n!}\right)^2 \int^1_{-1} (\mu^2-1)^n d\mu \\ =\dfrac{2}{2n+1} \end{matrix} \label{4.4.30}\]
donde en esa última línea se utilizó el resultado para la integral obtenida anteriormente en esta conferencia para la normalización\(Y^l_l\).
Hacer la misma integración repetida por partes para dos polinomios de Legendre diferentes demuestra que son ortogonales,\[ \int^1_{-1} P_m(\mu)P_n(\mu)d\mu=0, \; m\neq n \label{4.4.31}\]
Las funciones asociadas de Legendre se definen (para n y m cero o enteros positivos,\(n\ge m\)![]() ) por:\[ \begin{matrix} P^m_n(\mu)=(1-\mu^2)^{m/2}\dfrac{d^m}{d\mu^m}P_n(\mu) \\ =(-1)^n \dfrac{(1-\mu^2)^{m/2}}{2^n n!}\dfrac{d^{n+m}}{d\mu^{n+m}}(1-\mu^2)^n . \end{matrix} \label{4.4.32}\]
) por:\[ \begin{matrix} P^m_n(\mu)=(1-\mu^2)^{m/2}\dfrac{d^m}{d\mu^m}P_n(\mu) \\ =(-1)^n \dfrac{(1-\mu^2)^{m/2}}{2^n n!}\dfrac{d^{n+m}}{d\mu^{n+m}}(1-\mu^2)^n . \end{matrix} \label{4.4.32}\]
Siguiendo al Mesías en exigir\(Y^0_l(0,0)\) ser real y positivo, encontramos\[ Y^0_l(\theta,\phi)=\sqrt{\dfrac{2l+1}{4\pi}}P_l(\cos\theta) \label{4.4.33}\]
donde el coeficiente sólo refleja las diferentes convenciones de normalización. Del mismo modo, los armónicos esféricos con m distinto de cero son proporcionales a las funciones asociadas de Legendre (los impares no son polinomios en\(\cos\theta\), a pesar de Shankar p. 337, ya que incluyen potencias impares de\(\sin\theta\)),\[ Y^m_l(\theta,\phi)=\sqrt{\dfrac{(2l+1)(l-m)!}{4\pi(l+m)!}}(-1)^m e^{im\phi} P^m_l(\cos\theta). \label{4.4.34}\]
Los armónicos esféricos como base
Hemos encontrado expresiones explícitas para los armónicos esféricos: un conjunto ortonormal de funciones propias\(L^2\) y\(L_z\) definidas en la superficie de una esfera,\[ \int^{\pi}_{\theta=0}\int^{2\pi}_{\phi=0} Y^{m'^{*}}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)\sin\theta d\theta d\phi=\int Y^{m'^*}_{l'}(\theta,\phi)Y^m_l(\theta,\phi)d\Omega=\delta_{l'l}\delta_{m'm} \; . \label{4.4.16}\]
Forman un conjunto completo:\[ \sum^{\infty}_{l=0}\sum^{l}_{m=-l} |l,m\rangle \langle l,m|=I \label{4.4.35}\]
o\[ \sum^{\infty}_{l=0}\sum^{l}_{m=-l} Y^{m^*}_l(\theta,\phi)Y^{m}_l(\theta',\phi')=\delta(\cos\theta-\cos\theta')\delta(\phi-\phi')=\delta(\Omega-\Omega') \label{4.4.36}\]
en la notación de Mesías, donde W se refiere a un punto en la superficie esférica.
(La prueba formal de la integridad se da en Byron y Fuller, Matemáticas de Física Clásica y Cuántica.)
La ecuación anterior también podría escribirse\[ \sum^{\infty}_{l=0}\sum^{l}_{m=-l} \langle\theta,\phi|l,m\rangle\langle l,m|\theta',\phi'\rangle=\langle\theta,\phi|\theta',\phi'\rangle=\delta(\cos\theta-\cos\theta')\delta(\phi-\phi') \label{4.4.37}\]
donde el ket\(|\theta',\phi'\rangle\) debe entenderse como un ket localizado, la versión esférico-superficial de\(|x\rangle\), normalizada por su función delta producto interno con el sujetador\(\langle\theta,\phi|\), exactamente análoga a\(\langle x|x'\rangle=\delta(x-x')\), teniendo en cuenta que el elemento de área infinitesimal es\(-d(\cos\theta)d\phi\), (una cantidad positiva en el intervalo relevante, 0 a\(\pi\)).
Esta completitud significa que cualquier función razonable sobre la superficie de la esfera puede expresarse como una suma sobre armónicos esféricos con coeficientes apropiados, es decir, la generalización esférica de una serie de Fourier.
De hecho,\(L^2\) es equivalente a\(\nabla^2\) sobre la superficie esférica, por lo que las\(Y^m_l\) son las funciones propias del operador\(\nabla^2\). Así como en una dimensión las funciones propias de\(d^2/dx^2\) tienen la dependencia espacial de los modos propios de una cuerda vibrante, los armónicos esféricos tienen la dependencia espacial de los modos propios de un globo esférico vibrante. Por supuesto, para describir el desplazamiento de la piel del globo (¡que debe ser real!) con estas funciones propias, ya no podemos usar las funciones propias del componente z del momento angular, ya que son complejas excepto en el caso trivial cero. Debemos reorganizar las funciones propias de\(L^2\), por ejemplo reemplazando el par\(e^{i\phi},\; e^{-i\phi}\) con\(\cos\phi,\sin\phi\). Estas soluciones reales, esencialmente\[ \dfrac{1}{\sqrt{2}}(|l,l\rangle\pm|l,-l\rangle) \label{4.4.38}\]
, tienen líneas\(l\) nodales (ceros) de longitud. Bajando una muesca en\(|m|\), el estado (real) con\(|m|=l-1\) tiene nodos\(l-1\) longitudinales, pero ha agregado un nodo latitudinal: el ecuador. Luego\(|m|=l-2\) tiene nodos\(l-2\) longitudinales, 2 líneas nodales latitudinales — siempre hay líneas\(l\) nodales totales.
Algunos de estos modos de vibración se han observado en el sol después de una tormenta de manchas solares. Los armónicos esféricos también se utilizan en el análisis de la radiación cósmica de fondo.
Algunos armónicos esféricos de orden bajo
Veamos con más detalle los armónicos esféricos de orden más bajo. Para los primeros, la normalización del estado más alto\(|l,l\rangle\) es bastante fácil de hacer desde cero: factorizar la\(\phi\) dependencia como antes\(Y^m_l(\theta,\phi)=\Theta^m_l(\theta)\Phi_m(\phi)\), y tomando la normalizada\(\Phi_m(\phi)=e^{im\phi}/\sqrt{2\pi}\), la\(\theta\) normalización para\(|l,l\rangle\) es solo
\[ |N|^2\int^{\pi}_0 (\sin\theta)^{2l+1}d\theta=1 \label{4.4.17}\]
Esto se logra fácilmente para\(l=0,1,2\).
Todo lo que necesitamos es\[ L_{\pm}=\pm\hbar e^{\pm i\phi}\left( \dfrac{\partial}{\partial\theta}\pm i\cot\theta\dfrac{\partial}{\partial\phi}\right) \label{4.4.39}\]
,\[ L_-|l,m\rangle=\hbar\sqrt{l(l+1)-m(m-1)}|l,m-1\rangle \label{4.4.40}\]
, y finalmente la convención de signos que\(Y^0_l(0,0)\) sean reales y positivos.
Con unos pasos elementales, se puede establecer que:\[ \begin{matrix} Y^0_0=\dfrac{1}{\sqrt{4\pi}} \\ Y^1_1=-\sqrt{\dfrac{3}{8\pi}}\sin\theta e^{i\phi} \\ Y^0_1=\sqrt{\dfrac{3}{4\pi}}\cos\theta \\ Y^{-1}_1=\sqrt{\dfrac{3}{8\pi}}\sin\theta e^{-i\phi} \end{matrix} \label{4.4.41}\]
\[ \begin{matrix} Y^2_2=\sqrt{\dfrac{15}{32\pi}}\sin^2\theta e^{2i\phi},\; Y^1_2=-\sqrt{\dfrac{15}{8\pi}}\sin\theta\cos\theta e^{i\phi},\; Y^0_2=\sqrt{\dfrac{5}{16\pi}}(3\cos^2\theta-1) \\ Y^{-2}_2=\sqrt{\dfrac{15}{32\pi}}\sin^2\theta e^{-2i\phi},\; Y^{-1}_2=\sqrt{\dfrac{15}{8\pi}}\sin\theta\cos\theta e^{-i\phi},\; \end{matrix} \label{4.4.42}\]
<
A menudo es útil escribir el\(Y^m_l\) en términos de coordenadas cartesianas,\[ (x,y,z)=(r\sin\theta\cos\phi,\; r\sin\theta\sin\phi,\; r\cos\theta) \label{4.4.43}\]
por lo\[ Y^1_1(x,y,z)=-\sqrt{\dfrac{3}{8\pi}}\cdot \dfrac{x+iy}{r},\; Y^0_1(x,y,z)=\sqrt{\dfrac{3}{4\pi}}\cdot \dfrac{z}{r},\; Y^{-1}_1(x,y,z)=\sqrt{\dfrac{3}{8\pi}}\cdot \dfrac{x-iy}{r} \label{4.4.44}\]
y\[ Y^2_2=\sqrt{\dfrac{15}{32\pi}} \dfrac{(x+iy)^2}{r^2},\; Y^1_2=-\sqrt{\dfrac{15}{8\pi}}\dfrac{(x+iy)z}{r^2},\; Y^0_2=\sqrt{\dfrac{5}{16\pi}}\dfrac{(3z^2-1)}{r^2},\; etc. \label{4.4.45}\]
El Y 1 m como Base del Subespacio l = 1
Los\(Y^m_1\) son los\(l = 1\) autoestados de\(L^2\) y\(L_z\). Pero, ¿y si hubiéramos elegido buscar los autoestados comunes de\(L^2\) y\(L_x\) en su lugar? ¿Qué\(l = 1\) estado tiene componente de momento angular cero en la dirección del eje x? Claramente será\[ \sqrt{\dfrac{3}{4\pi}}\cdot\dfrac{x}{r} \label{4.4.46}\]
, es decir, el anterior\(Y^0_1\) con z reemplazado por x, porque después de todo, nuestro etiquetado de ejes fue arbitrario.
Ahora,\[ \sqrt{\dfrac{3}{4\pi}}\cdot\dfrac{x}{r} \; is \; just\; (1/\sqrt{2})(-Y^1_1+Y^{-1}_1). \label{4.4.47}\]
De hecho, cualquier\(l = 1\) estado, con un componente especificado en cualquier dirección, puede escribirse como\[ \alpha_1|1,1\rangle+\alpha_0|1,0\rangle+\alpha_{-1}|1,-1\rangle=\sum \alpha_m|1,m\rangle. \label{4.4.48}\]
Esto puede verse de la siguiente manera: un\(l = 1\) estado tiene que ser lineal en\(x/r,\; y/r,\; z/r\) (cualquier término cuadrático daría lugar a\(e^{2i\phi}\) alrededor de un eje apropiado, llamarlo el eje z, así\(m = 2\) y\(l\) debe ser 2 o mayor), y cualquier estado de este tipo puede escribirse como un lineal combinación de\[ (x+iy)/\sqrt{2}r,\; (x-iy)/\sqrt{2}r,\; z/r \label{4.4.49}\]
La conclusión, entonces, es que el\(Y^m_1\) do de hecho proporcionan una base completa para el\(l = 1\) espacio de los autoestados de\(L^2\).
Representación del operador de rotación dentro del subespacio l = 1
Recordemos que originalmente introdujimos el operador de momento angular\(\vec{J}\) definiéndolo como el generador de rotaciones infinitesimales al actuar sobre cualquier función de onda, incluidas las funciones de onda multicomponente. Se encontró, utilizando las propiedades de conmutatividad de las rotaciones ordinarias, que los componentes vectoriales de\(\vec{J}\) tenían que satisfacer\([J_x,J_y]=i\hbar J_z\), etc., y de eso dedujimos los posibles conjuntos de valores propios del par de operadores de desplazamiento\(\vec{J}^2\),\(J_z\) fueron\(j(j+1)\hbar^2\) para\(\vec{J}^2\), con\(j\) un entero de la mitad de un entero impar, y para cada uno\(j\) de ellos los valores propios permitidos de\(J_z\) fueron
\[ m\hbar,\; m=-j,-j+1,\dots,+j. \label{4.4.50}\]
Volver a las funciones de onda\(l = 1\) angular: hemos establecido que cualquier función de este tipo puede ser escrita
\[ \alpha_1|1,1\rangle+\alpha_0|1,0\rangle+\alpha_{-1}|1,-1\rangle=\sum \alpha_m|1,m\rangle. \label{4.4.48b}\]
y así es un vector en un espacio tridimensional abarcado por el conjunto\(|1,m\rangle,\; m=1,0,-1\). En otras palabras, la función de onda es un objeto de tres componentes. Por lo tanto, el operador de momento angular debe ser un operador de matriz en este espacio tridimensional, de tal manera que, por definición, el efecto de una rotación infinitesimal sobre la función de onda multicomponente sea:
\[ R(\delta\vec{\theta})\Psi_{l=1}(\theta,\phi)=e^{-\dfrac{i}{\hbar}\delta\vec{\theta}\cdot\hat{\vec{J}}} \begin{pmatrix} \alpha_1 \\ \alpha_0 \\ \alpha_{-1} \end{pmatrix}=\begin{pmatrix} \alpha_1' \\ \alpha_0' \\ \alpha_{-1}' \end{pmatrix} \label{4.4.51}\]
El operador de rotación unitaria que actúa en el\(l = 1\) subespacio,
\[ U(R(\vec{\theta}))=e^{-\dfrac{i\vec{\theta}\cdot\vec{J}}{\hbar}} \label{4.4.52}\]
, tiene que ser una\(3\times3\) matriz. La notación estándar para sus elementos de matriz es:
\[ D^{(1)}_{m'm}(R(\vec{\theta}))=\langle 1,m'|e^{-\dfrac{i\vec{\theta}\cdot\vec{J}}{\hbar}}|1,m\rangle \label{4.4.53}\]
por lo que el ket girado es
\[ \alpha_{m'}'=\sum_{m',m}D^{(1)}_{m'm}\alpha_m,\;\; or\; \alpha'=D\alpha \label{4.4.54}\]
Para evaluar esta matriz de manera explícita, debemos ampliar lo exponencial y necesitamos los elementos matriciales de\(J_z\)\(J_+\),,\(J_-\) entre los estados\(|1,m\rangle\) —que ya conocemos.
Ahora bien, la base del espacio tridimensional son solo los propios bienes comunes de\(\vec{J}^2\),\(J_z\), en este caso idénticos a\(\vec{L}^2\),\(L_z\). Conocemos los elementos matriciales de\(J_z\)\(J_+\),,\(J_-\) entre estados\(|j,m\rangle\) de la conferencia anterior, por lo que es sencillo encontrar las representaciones matriciales de los componentes de\(J\) en este espacio:
\[ J^{(1)}_x=\dfrac{\hbar}{\sqrt{2}}\begin{pmatrix} 0&1&0 \\ 1&0&1 \\ 0&1&0 \end{pmatrix},\;\; J^{(1)}_y=\dfrac{i\hbar}{\sqrt{2}}\begin{pmatrix} 0&-1&0 \\ 1&0&-1 \\ 0&1&0 \end{pmatrix},\;\; J^{(1)}_z=\hbar\begin{pmatrix} 1&0&0 \\ 0&0&0 \\ 0&0&-1 \end{pmatrix}. \label{4.4.55}\]
Hemos agregado el superíndice (1) porque esta representación de los operadores de rotación infinitesimal es específica de\(j = 1\) (representaciones para valores generales de\(j\) son como\((2j+1)\times(2j+1)\) matrices, reflejando la dimensionalidad del espacio abarcado por los\(2j + 1\) distintos\(m\) valores).
Expandir lo exponencial no es difícil, ya que por inspección\((J^{(1)}_z/\hbar)^3=(J^{(1)}_z/\hbar)\), por lo que a partir de la simetría esférica\((\hat{\vec{n}}\cdot\vec{J}^{(1)}/\hbar)^3=(\hat{\vec{n}}\vec{J}^{(1)}/\hbar)\) para un vector unitario en cualquier dirección. El resultado es:
\[ D^{(1)}(R(\vec{\theta}))=e^{-\dfrac{i\theta\hat{\vec{n}}\cdot\vec{J}}{\hbar}}=I+(\cos\theta-1)\left( \dfrac{\hat{\vec{n}}\cdot\vec{J}}{\hbar}\right)^2-i\sin\theta\left( \dfrac{\hat{\vec{n}}\cdot\vec{J}}{\hbar}\right). \label{4.4.56}\]
Otro punto debemos señalar: al final de la conferencia de álgebra lineal, discutimos las rotaciones sobre el eje z en el espacio ordinario (x, y, z). Obviamente, si etiquetamos un punto en el plano (x, y) usando el número complejo\(x + iy\), una rotación por un ángulo\(\theta\) alrededor del eje z moverá el punto de tal manera que la nueva etiqueta sea\(e^{i\theta}(x+iy)\). El ángulo en este caso tiene el signo opuesto al dado por el operador anterior: la razón es que cuando escribimos el estado propio como\[ -\sqrt{\dfrac{3}{8\pi}}\cdot \dfrac{x+iy}{r} \label{4.4.57}\]
esto es una función de posición en el plano, no un punto en el plano, así que por las razones discutidas al inicio de la primera conferencia Momentum Angular, el signo es opuesto.