
9.1: Reflexión y Transmisión
- Page ID
- 124802

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Oscilación forzada
Considera el problema de la oscilación forzada en una cuerda estirada semiinfinita que va de\(x = 0\) a\(x = \infty\). Supongamos que\[\psi(0, t)=A \cos \omega t\]
Entonces, ¿qué es\(\psi(x,t)\)? Este no es un problema bien planteado, porque solo tenemos una condición de límite en un lado. Además,\(\psi(\infty, t)\) no tiene un valor definido. Sólo podemos hablar del valor de una función al infinito si la función pasa a un valor constante. Aquí, esperamos\(\psi(x,t)\) seguir oscilando como\(x \rightarrow \infty\), por lo que no podemos especificarlo. En su lugar, podemos especificar ya sea las ondas entrantes (viajando hacia el límite\(x = 0\) en la\(- x\) dirección) o las salientes (que se alejan de\(x = 0\) en la\(+ x\) dirección) que viajan en el sistema. Esto se llama una “condición límite en\(\infty\).”
Por ejemplo, podríamos tomar nuestra condición de límite en el infinito para ser que no aparezcan ondas viajeras entrantes en la cuerda. Físicamente, esto corresponde a la situación en la que el movimiento de la cuerda en\(x = 0\) está produciendo las olas. En general, podemos escribir una solución con frecuencia angular\(\omega\) como una suma de cuatro ondas viajeras reales\ [\ begin {alineadas}
&\ psi (x, t) =a\ cos (k x-\ omega t) +b\ sin (k x-\ omega t)\\
&+c\ cos (k x+\ omega t) +d\ sin (k x+\ omega t).
\ end {alineado}\]
Entonces (9.1) implica\[a+c=A, \quad b-d=0 ,\]
y la condición límite en\(\infty\) implica\[c=d=0 .\]
Así\[\psi(x, t)=A \cos (k x-\omega t) .\]
Sistemas Infinitos
Consideremos ahora dos cuerdas semi-infinitas con la misma tensión pero diferentes densidades que se atan juntas en\(x = 0\), como se muestra en la Figura\( 9.1\). Supongamos que en la\(x \leq 0\) región (Región\(I\)), hay una onda viajera entrante con amplitud\(A\) y frecuencia angular\(\omega\), y en la\(x \geq 0\) región (Región\(II\)), no hay onda viajera entrante. Esto describe una situación física en la que la onda entrante\(I\) se dispersa por el límite de manera que las otras ondas son una onda transmitida en\(II\) y una onda reflejada en\(I\), ambas salientes.
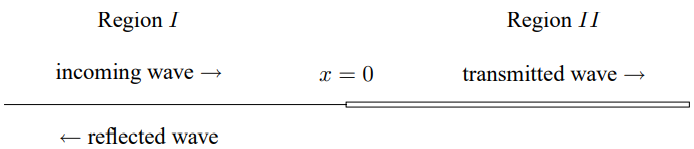
Figura\( 9.1\): Dos cuerdas semi-infinitas atadas juntas en\(x = 0\).
La clave de este problema es pensarlo como un problema de oscilación forzada. La onda viajera entrante en la región\(I\) es lo que está “causando” todas las oscilaciones. Hemos puesto la palabra entre comillas, porque la forma armónica\(e^{-i \omega t}\),, para la oscilación implica que ha estado ocurriendo desde siempre, para que un filósofo pueda cuestionar este uso de causa y efecto. No obstante, nos ayudará a pensarlo de esta manera. Si las ondas reflejadas y transmitidas son producidas por la onda entrante, sus amplitudes también serán proporcionales a\(e^{-i \omega t}\). Como en un problema de oscilación forzada convencional, podríamos agregar cualquier oscilación libre del sistema. No obstante, si hay alguna fricción, éstas morirán con el tiempo, y nos quedaremos solo con la oscilación producida por la onda viajera entrante, proporcional a\(e^{-i \omega t}\). Lo importante es que la frecuencia sea la misma en ambas regiones, pues como en un problema de oscilación forzada, la frecuencia es impuesta al sistema por una agencia externa, en este caso, lo que sea que haya producido la onda viajera entrante.
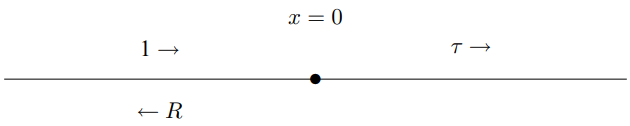
En nuestra compleja notación exponencial en la que todo tiene la dependencia irreducible del tiempo,\(e^{-i \omega t}\). Las ondas en movimiento derecho son\(\propto e^{i k x} e^{-i \omega t}\) y las ondas móviles a la izquierda son\(\propto e^{-i k x} e^{-i \omega t}\). En este caso, las condiciones de contorno en\(\pm \infty\) requieren que\[\psi(x, t)=e^{i k x} A e^{-i \omega t}+R A e^{-i k x} e^{-i \omega t}\]
para\(x \leq 0\) en la región\(I\), y\[\psi(x, t)=\tau A e^{i k^{\prime} x} e^{-i \omega t}\]
para\(x \geq 0\) en Región\(II\). Los\(k\) y\(k^{\prime}\) son\[k=\omega \sqrt{\rho_{I} / T}, \quad k^{\prime}=\omega \sqrt{\rho_{I I} / T} ,\]
y\(R\) y\(\tau\) son (en general) números complejos que determinan las ondas reflejadas y transmitidas. A veces se les llama el “coeficiente de reflexión” y “coeficiente de transmisión”, o las “amplitudes” para la transmisión y la reflexión. Observe que hemos definido los coeficientes de reflexión y transmisión sacando un factor de la amplitud,\(A\), de la onda entrante. La amplitud,\(A\), luego cae fuera de todas las condiciones límite, y los coeficientes adimensionales\(R\) y\(\tau\) son independientes de\(A\). Esto debe ser así por la linealidad del sistema. Sabemos que una vez que hemos encontrado la solución\(\psi(x, t)\),, para una amplitud entrante\(A\),, podemos encontrar la solución para una amplitud entrante\(B\),, multiplicando nuestra solución por\(B / A\). Mantendremos el parámetro,\(A\), en nuestras expresiones for\(\psi(x, t)\), mayormente con el fin de mantener las unidades correctas. \(A\)tiene unidades de longitud en este ejemplo, pero en general, la amplitud de la onda entrante tendrá unidades de desplazamiento generalizado (como en (1.107) y (1.108)).
Para determinar\(R\) y\(\tau\), necesitamos una condición límite en\(x = 0\) donde (9.6) y (9.7) se encuentran. Claramente\(\psi(x, t)\) debe ser continuo en\(x = 0\), por lo tanto\[1+R=\tau .\]
Hemos cancelado el factor común de\(A e^{-i \omega t}\) desde ambos lados. La\(x\) derivada también debe ser continua (para un nudo sin masa) porque las fuerzas verticales sobre el nudo deben equilibrarse, por lo tanto\[i k(1-R)=i k^{\prime} \tau .\]
Resolviendo\(R\) y\(\tau\) da\[\tau=\frac{2}{1+k^{\prime} / k}, \quad R=\frac{1-k^{\prime} / k}{1+k^{\prime} / k} .\]
Coincidencia de impedancia
Tenga en cuenta que podríamos reemplazar la cadena en Region\(II\) por un dashpot con la misma impedancia,\(Z_{II}\). Esto debe ser cierto debido a la naturaleza local de las interacciones. Lo único para lo que la cuerda\(x < 0\) sabe de la cuerda\(x > 0\) es que ejerce una fuerza\(x = 0\) igual a\[-Z_{I I} \frac{\partial}{\partial t} \psi(0, t) .\]
Así también aprendimos lo que sucede cuando una onda entrante se encuentra con un dashpot con la impedancia incorrecta. La amplitud de la onda reflejada viene dada por\(R\) in (9.11).
La onda reflejada en (9.11) desaparece si\(k = k^{\prime}\). Si\(k = k^{\prime}\), entonces\(\rho_{I} = \rho_{II}\) (de (9.8)), y la impedancia en la región\(I\) es la misma que la impedancia en la región\(II\). Este es un ejemplo simple del importante principio de “adaptación de impedancia”. No hay reflexión si la impedancia del sistema en región\(II\) es la misma que la impedancia del sistema en región\(I\). El argumento es el mismo que para el dashpot en el párrafo anterior. Lo que importa en el cálculo del coeficiente de reflexión son las fuerzas que actúan sobre la cuerda en\(x = 0\). Esas fuerzas están determinadas por las impedancias en las dos regiones. Nada más importa. Consideremos, por ejemplo, el sistema mostrado en la Figura\( 9.2\) de dos cuerdas semi-infinitas conectadas\(x = 0\) a un anillo sin masa el cual es libre de deslizarse en dirección vertical sobre una varilla sin fricción. La varilla puede ejercer una fuerza horizontal sobre el anillo, por lo que las tensiones en las dos cuerdas no necesitan ser las mismas. En tal sistema, podemos cambiar tanto la densidad como la tensión en la cuerda de una región\(I\) a otra\(II\). No habrá reflexión siempre y cuando el producto de la densidad de masa lineal y la tensión (y así la impedancia, desde (8.22)) sea el mismo en ambas regiones,\[Z_{I}=\sqrt{\rho_{I} T_{I}}=\sqrt{\rho_{I I} T_{I I}}=Z_{I I} .\]

Figura\( 9.2\): Un sistema en el que se pueden igualar impedancias.
Es instructivo resolver completamente el problema de dispersión para el caso más general que se muestra en la Figura\( 9.2\). Esto nos dará una sensación por el significado de la impedancia. La forma de la solución, (9.6) y (9.7) no cambia, pero ahora los números de onda angular satisfacen\[k=\omega \sqrt{\rho_{I} / T_{I}}, \quad k^{\prime}=\omega \sqrt{\rho_{I I} / T_{I I}} .\]
La condición de contorno al\(x = 0\) surgir de la continuidad de la cadena, (9.9), permanece sin cambios. No obstante, (9.10) surgió del hecho de que las fuerzas sobre el nudo sin masa deben sumar a cero por lo que la aceleración no es infinita. En este caso, a partir de (8.21), la contribución de cada componente de la onda a la fuerza total es proporcional a más o menos la impedancia en la región relevante dependiendo de si se está moviendo en la\(- x\) dirección\(+ x\) o la. Por lo tanto, la condición límite es\[Z_{I}(1-R)=Z_{I I} \tau .\]
Entonces los coeficientes de reflexión y transmisión son\[\tau=\frac{2 Z_{I}}{Z_{I}+Z_{I I}}, \quad R=\frac{Z_{I}-Z_{I I}}{Z_{I}+Z_{I I}} .\]
Ya hemos discutido el caso en el que las impedancias coinciden y el coeficiente de reflexión desaparece. También es interesante mirar los límites en los que\(R=\pm 1\). Primero consideremos el límite en el que la impedancia en la región\(II\) va al infinito,\[\lim _{Z_{I I} \rightarrow \infty} R=-1 .\]
Esta es una situación en la que se necesita una fuerza infinita para producir una ola en la región\(II\). Por lo tanto, la cadena en la región\(II\) no se mueve en absoluto, y en particular, el punto bien\(x = 0\) podría ser un extremo fijo. La solución, (9.17) asegura que la cadena no se mueva a\(x = 0\), y por lo tanto que la solución en región\(I\) es\(\psi(x, t) \propto \sin k x\). Esta solución es una onda estacionaria infinita con una condición de límite final fijo.
En el límite opuesto, en el que la impedancia en región\(II\) es cero, obtenemos\[\lim _{Z_{I I} \rightarrow 0} R=1 .\]
Esta vez, no se necesita fuerza alguna para producir una ola en la región\(II\). Por lo tanto, el extremo de la región\(I\) en no\(x = 0\) siente fuerza transversal. Actúa como un extremo libre. La solución, (9.18) asegura que\(\psi(x, t) \propto \cos k x\) en región\(I\), por lo que la pendiente de la cuerda se desvanece en\(x = 0\). Esta solución es una onda estacionaria infinita con una condición de límite de extremo libre.
Mirando las ondas reflejadas
9-1
En esta sección, discutimos cómo es el desplazamiento en la Región I. Encontraremos un diagnóstico útil para la presencia de reflexión. También concluiremos que las olas estacionarias son muy especiales.
Mira una ola de la forma\[A \cos (k x-\omega t)+R A \cos (k x+\omega t) .\]
Esto describe una onda viajera entrante con alguna onda reflejada de amplitud\(R\) (podríamos poner en una fase arbitraria para la onda reflejada pero complicaría el álgebra sin cambiar la física).
Porque\(R=\pm 1\), esto es una onda estacionaria. Porque\(R = 0\), es una ola viajera. Para ver cómo interpola el sistema entre estos dos extremos, considera el movimiento de la cresta de la onda, un máximo de (9.19).
Para encontrar el máximo, diferenciamos con respecto\(x\) y establecemos el resultado a cero. Eliminando el factor irrelevante de\(A\), obtenemos\[\sin (k x-\omega t)+R \sin (k x+\omega t)=0 ,\]
o\[(1+R) \sin k x \cos \omega t=(1-R) \cos k x \sin \omega t ,\]
o\[\tan k x=\frac{1-R}{1+R} \tan \omega t .\]
(9.22) describe (implícitamente — podríamos resolver para\(x\) en función de\(t\) si nos apeteciéramos) el movimiento del máximo en función del tiempo. Podemos diferenciarlo para obtener la velocidad:\[k\left(1+\tan ^{2} k x\right) \frac{\partial x}{\partial t}=\frac{1-R}{1+R} \frac{\omega}{\cos ^{2} \omega t} .\]
Hemos dejado\(\left(1+\tan ^{2} k x\right)\) en (9.23) para que podamos eliminarlo usando (9.22). Así\ [\ comenzar {alineado}
&\ frac {\ parcial x} {\ parcial t} =\ frac {1-R} {1+R}\ frac {\ omega} {k}\ frac {1} {\ izquierda (1+\ tan ^ {2} k x\ derecha)\ cos ^ {2}\ omega t}\\
=&\ frac {1-R} {1+R}\ frac {\ omega} {k}\ frac {1} {\ izquierda (1+\ izquierda (\ frac {1-R} {1+R}\ derecha) ^ {2}\ tan ^ {2}\ omega t\ derecha)\ cos ^ {2}\ omega t}\\
=& v\ frac {(1+R) (1-R)} {(1+R) ^ {2}\ cos ^ {2}\ omega t+ (1-R) ^ {2}\ sin ^ {2}\ omega t}
\ final {alineado}\]
donde\(v=\omega / k\) esta la velocidad de fase. Cuando\(\sin \omega t\) desaparece, la velocidad del máximo es menor que la velocidad de fase por un factor de\[\frac{1-R}{1+R} ,\]
mientras que cuando\(\cos \omega t\) desaparece, la velocidad es mayor que la\(v\) por el factor inverso,\[\frac{1+R}{1-R} .\]
La ola así parece moverse en ataques y arranca. Puedes ver fácilmente este efecto si miras fijamente un sistema con mucha reflexión. El efecto se ilustra en el programa 9-1.
Podemos sacar una moral más general a partir de esta discusión. El caso general del movimiento de las olas se parece mucho más a una onda viajera que a una onda estacionaria. Genéricamente, a excepción de\(R=\pm 1\), las crestas de ola se mueven con el tiempo. A medida que nos acercamos\(R=\pm 1\), una de las dos velocidades en (9.25) y (9.26) va a cero y la otra va al infinito. Lo que sucede cuando estás cerca\(R=\pm 1\) es entonces que la ola permanece casi quieta la mayor parte del tiempo, y luego se mueve muy rápidamente a la siguiente posición casi estacionaria. Una onda estacionaria es así un caso especial degenerado de una onda viajera en la que este movimiento es inobservable porque, en cierto sentido, es infinitamente rápido.
Poder y Reflexión
Es instructivo considerar la potencia requerida para producir una onda viajera que se refleja parcialmente. Es decir, consideramos la potencia requerida por una fuerza transversal que actúa\(x = 0\) para producir una onda en la región\(x > 0\) que es una combinación lineal de una onda saliente que se mueve en la\(+ x\) dirección y una onda entrante que se mueve en la\(- x\) dirección, tal como podría ser producida por una reflexión a algún gran valor de\(x\). Imaginemos el caso unidimensional más general, en un medio con impedancia Z:\ [\ begin {reunió}
\ psi (x, t) =\ operatorname {Re}\ left (A_ {+} e^ {i (k x-\ omega t)} +A_ {-} e^ {i (-k x-\ omega t)}\ derecha)\\
=R_ {+} cos\ izquierda (k x-\ omega t+\ phi_ {+}\ derecha) +R_ {-}\ cos\ izquierda (-k x-\ omega t+\ phi_ { -}\ derecha)
\ fin {reunidos}\]
donde\(R_{\pm}\) y\(\phi_{\pm}\) son el valor absoluto y la fase de la amplitud\(A_{\pm}\). La velocidad es\[\frac{\partial}{\partial t} \psi(x, t)=\omega R_{+} \sin \left(k x-\omega t+\phi_{+}\right)+\omega R_{-} \sin \left(-k x-\omega t+\phi_{-}\right) .\]
Ahora porque (9.27) implica ondas que viajan tanto en la\(+ x\)\(- x\) dirección como en la dirección, no podemos encontrar la fuerza requerida para producir la onda en el punto\(x\) simplemente multiplicando (9.28) por la impedancia,\(Z\). Sin embargo, podemos usar linealidad. Podemos escribir\(\psi(x, t)=\psi_{+}(x, t)+\psi_{-}(x, t)\), donde\(\psi_{\pm}(x, t)\) se mueve la ola en la\(\pm x\) dirección. Entonces a partir de (8.21), la fuerza requerida para producir\(\psi_{+}\) es\[F_{+}(t)=Z \frac{\partial}{\partial t} \psi_{+}(0, t)\]
mientras que la fuerza requerida para producir\(\psi_{-}\) es\[F_{-}(t)=-Z \frac{\partial}{\partial t} \psi_{-}(0, t) .\]
Entonces la fuerza total requerida para producir\(\psi\) es\ [\ begin {reunió}
F (t) =F_ {+} (t) +F_ {-} (t)\\
=Z\ omega R_ {+}\ sin\ left (-\ omega t+\ phi_ {+}\ right) -Z\ omega R_ {-}\ sin\ left (-\ omega t+\ phi_ {-} derecha\).
\ end {reunido}\]
Así la potencia requerida es\ [\ begin {recopilada}
P (t) =\ izquierda.F (t)\ frac {\ parcial} {\ parcial} {\ t parcial}\ psi (x, t)\ derecha|_ {
x=0}\\ =Z\ omega^ {2} R_ {+} ^ {2}\ sin ^ {2}\ left (-\ omega t+\ phi_ {+}\ derecha) -Z\ omega^ {2} R_ {-} ^ {2}\ sin ^ {2}\ izquierda (-\ omega t+\ phi_ {-}\ derecha).
\ end {reunido}\]
El poder promedio viene dado entonces por\[P_{\text {average }}=\frac{1}{2} Z \omega^{2}\left(R_{+}^{2}-R_{-}^{2}\right)=\frac{1}{2} Z \omega^{2}\left(\left|A_{+}\right|^{2}-\left|A_{-}\right|^{2}\right) .\]
El resultado, (9.32), tiene una interpretación física obvia e importante. Se requiere potencia positiva para producir la onda viajera saliente, mientras que la onda entrante devuelve energía al sistema y, por lo tanto, requiere potencia negativa. La potencia requerida para producir una onda viajera general es así proporcional a la diferencia de los cuadrados de los valores absolutos de las amplitudes de las ondas saliente y entrante.
Obsérvese también que podemos aplicar esta discusión al ejemplo de reflexión en un límite, discutido anteriormente. Podemos comprobar que la energía se conserva en esta dispersión. La potencia promedio requerida para producir la onda en la región\(I\) es, de (9.33)\[Z_{I} \omega^{2}-Z_{I} \omega^{2} R^{2} .\]
La potencia promedio requerida para producir la ola en la región\(II\) es,\[Z_{I I} \omega^{2} \tau^{2} .\]
Usando (9.16), puedes comprobar que estos son iguales.
Masa en una cadena
 9-2
9-2
Figura\( 9.3\): Una masa en una cuerda.
Considerar la transmisión y reflexión de las ondas a partir de una masa\(m\),,\(x = 0\) en una cuerda con densidad de masa lineal\(\rho\) y tensión\(T\), estirada de\(x=-\infty\) a\(x=\infty\), mostrada en la Figura\( 9.3\). Antes de calcular los coeficientes de reflexión y transmisión, adivinemos el resultado en dos límites extremos.
\(m\)pequeño — Aquí esperamos que la reflexión sea pequeña y la transmisión cercana a una, porque en el límite\[m \rightarrow 0 \Rightarrow \tau \rightarrow 1 \text { and } R \rightarrow 0 .\]
\(m\)grande — Aquí esperamos que la transmisión sea pequeña y la reflexión cercana a\(- 1\), porque en el límite\[m \rightarrow \infty \rightarrow \tau \rightarrow 0 \text { and } R \rightarrow-1 .\]
“¿Grande o pequeño en comparación con qué?” usted pregunta! Eso podemos responder por análisis dimensional. Los parámetros dimensionales relevantes son\(m\)\(\omega\),\(k\),\(\rho\) y\(T\). Sin embargo, uno de ellos no es independiente, debido a la relación de dispersión, (6.5). Si usamos (6.5) para eliminar\(T\), entonces\(\omega\) no puede ser relevante para la pregunta, porque es lo único que queda que involucra la unidad de tiempo. La única cantidad adimensional que podemos construir es\[\epsilon=\frac{m k}{\rho}=\frac{m \omega^{2}}{k T} .\]
Ahora que lo hemos adivinado, podemos hacer el cálculo. Se deduce de la invarianza de la traducción y la condición de límite en\(x = \infty\) ese\[\psi(x, t)=A e^{i k x} e^{-i \omega t}+R A e^{-i k x} e^{-i \omega t} \text { for } x \leq 0\]
\[\psi(x, t)=\tau A e^{i k x} e^{-i \omega t} \text { for } x \geq 0\]
donde, como es habitual,\(R\) y\(\tau\) son “amplitudes” para las ondas reflejadas y transmitidas. Las condiciones de contorno son
continuidad — El hecho de que la cadena no se rompa implica que es continua, por lo que se\(\psi(0, t)\) puede computar con (9.39) o (9.40). Esto implica\[1+R=\tau .\]
\(F = ma\)— El componente horizontal de la tensión en la cuerda debe ser igual en los dos lados. Ambos son aproximadamente iguales a\(T\), para pequeños desplazamientos. Sin embargo, si hay una torcedura en la cadena, los componentes verticales no coinciden, como se muestra en la Figura\( 9.4\) (ver también (8.16) - (8.17)). La fuerza sobre la masa es entonces la tensión veces la pendiente para\(x \geq 0\) menos la tensión por los tiempos de la pendiente para\(x \leq 0\), así\(F = ma\) se convierte en\ [\ begin {reunidos}
T\ left (\ left. \ frac {\ parcial} {\ parcial x}\ psi (x, t)\ derecha|_ {x=0^ {+}} -\ izquierda. \ frac {\ parcial} {\ parcial x}\ psi (x, t)\ derecha|_ {x=0^ {-}}\ derecha)\\
= m\ frac {\ parcial^ {2}} {\ parcial t^ {2}}\ psi (0, t)
\ final {reunido}\]
o\[i k T(R-1+\tau)=-m \omega^{2} \tau .\]
Así\[1+R=\tau, \quad 1-R=(1-i \epsilon) \tau ,\]
para que\[\tau=\frac{2}{2-i \epsilon}, \quad R=\frac{i \epsilon}{2-i \epsilon} .\]
Claramente, esto está de acuerdo con nuestra suposición.

Figura\( 9.4\): La fuerza sobre la masa.
Obsérvese que estas amplitudes, a diferencia de las de (9.11), son números complejos. Las ondas transmitidas y reflejadas no tienen la misma fase que la onda entrante en el límite. La diferencia de fase entre la onda transmitida (o reflejada) se denomina “desplazamiento de fase”. Una característica interesante de la solución, (9.45), que no adivinamos es que para grandes\(\epsilon\), la onda transmitida pequeña está\(90^{\circ}\) desfasada con la onda entrante.
Esta dispersión está animada en el programa 9-2. La solución también se descompone en ondas entrantes, transmitidas y reflejadas. Mire fijamente la masa y vea si puede entender cómo se relaciona el torcedura en la cuerda con su aceleración. También se puede hacer que la masa sea cada vez más grande para acercarse a los límites (9.36) y (9.37).