
11.7: Estática
- Page ID
- 125978

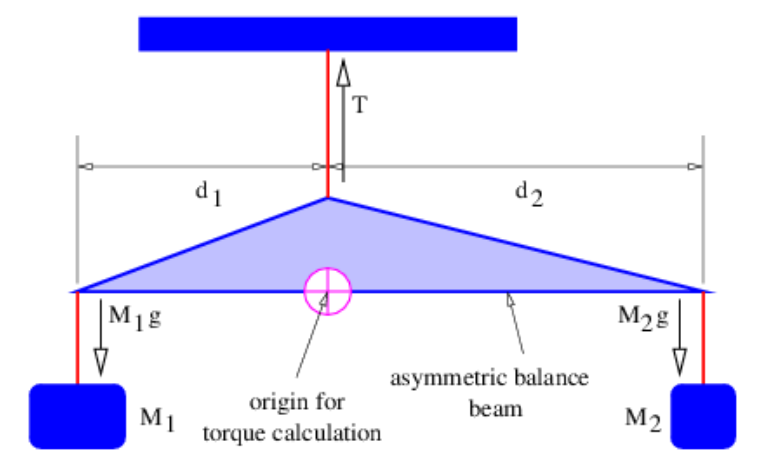
Si un cuerpo rígido está inicialmente en reposo, permanecerá en reposo si y sólo si la suma de todas las fuerzas y la suma de todos los pares que actúan sobre el cuerpo son cero. Como ejemplo, en la figura 11.7 se muestra un balance de masas con brazos de diferente longitud. La barra de equilibrio está sujeta a tres fuerzas que apuntan hacia arriba o hacia abajo, la tensión T en la cuerda de la que se suspende la viga y los pesos\(\mathrm{M}_{1} \mathrm{~g} \text { and } \mathrm{M}_{2} \mathrm{~g}\) ejercidos sobre la viga por las dos masas suspendidas. El parámetro\(g\) es el campo gravitacional local y se supone que el haz de equilibrio en sí tiene una masa insignificante. Tomando hacia arriba como positivo, la condición de fuerza para el equilibrio estático es
\[T-M_{1} g-M_{2} g=0 \quad \text { (zero net force) }\label{11.25}\]
Al definir un par en sentido contrario a las agujas del reloj para que sea positivo, el equilibrio de par calculado alrededor del punto de pivote en la figura 11.
\[\tau=M_{1} g d_{1}-M_{2} g d_{2}=0 \quad \text { (zero torque) }\label{11.26}\]
donde d 1 y d 2 son las longitudes de los brazos de viga.
La primera de las ecuaciones anteriores muestra que la tensión en la cuerda debe ser
\[T=\left(M_{1}+M_{2}\right) g\label{11.27}\]
mientras que el segundo demuestra que
\[\frac{M_{1}}{M_{2}}=\frac{d_{2}}{d_{1}}\label{11.28}\]
Así, la tensión en la cuerda es igual al peso de las masas unidas a la barra de equilibrio, mientras que la relación de las dos masas es igual a la relación inversa de las longitudes de brazo de viga asociadas.