
1.1: Introducción
- Page ID
- 89335

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Ojalá hayas tomado este curso porque ya tienes una idea de lo que es la teledetección, y quieres aprender más al respecto. Pero, ¿qué es exactamente la teledetección?
¿Qué es la teledetección?
Algunas definiciones muy amplias van algo así como 'la teledetección es estudiar algo sin tocarlo'. Si bien es cierto en el sentido más básico de las palabras, tales definiciones no son realmente muy útiles. Sin entrar en discusiones filosóficas sobre lo que significa 'estudiar' y 'tocar' de todos modos, creo que podemos estar de acuerdo en que no estás haciendo teledetección en este momento ya que estás leyendo este documento en la pantalla de una computadora... a pesar de aprender lo que dice este documento sin tocarlo. Más apropiadamente para este curso, podemos definir la teledetección como el uso de un instrumento (el sensor) para recopilar información sobre la superficie de la Tierra (u otras partes de la Tierra, sus océanos o atmósfera, u otros planetas para el caso) en grandes extensiones y a cierta distancia. Los ejemplos típicos incluyen el uso de imágenes satelitales o fotografía aérea, pero la detección acústica (por ejemplo, del fondo marino) y otras tecnologías que no crean datos en forma de “imagen” también forman parte del amplio tema de la teledetección. Este tipo de definición significa que otro término, 'Observación de la Tierra', a menudo se usa indistintamente con 'detección remota'.
Revisión de tecnologías de teledetección
Detección pasiva
Hay muchas maneras de dividir las tecnologías de teledetección existentes en categorías. Algunas tecnologías dependen de la energía ambiental (por ejemplo, la energía que está presente naturalmente en el ambiente, como la luz solar). A estas se les llama tecnologías de detección pasiva.
Detección activa
Otros proporcionan su propia fuente de energía, emitiendo un pulso de energía hacia un área objetivo y registrando la parte de la misma que se refleja de nuevo al sensor (piense en el sonar utilizado en los submarinos). Estas se llaman tecnologías de detección activa.
Detección óptica
Otra forma de categorizar las tecnologías de teledetección es por el tipo de energía que utilizan. Algunas tecnologías se basan en la luz visible (por ejemplo, la fotografía aérea tradicional), mientras que otras tecnologías amplían el rango de longitudes de onda detectadas al ultravioleta y al infrarrojo (que también es el tipo de 'luz' que usa el control remoto de tu televisor). Al medir la luz solar reflejada en estas longitudes de onda, estas se denominan tecnologías de detección óptica pasiva, ópticas porque los instrumentos emplean óptica clásica en su diseño. Las imágenes satelitales vistas en Google Earth, o utilizadas como fondo en pronósticos meteorológicos televisados, son imágenes creadas con teledetección óptica pasiva. Una forma de detección óptica activa se llama lidar, detección de luz y rango. Implica emitir un pulso láser (la parte activa) hacia un objetivo y medir el tiempo que tarda antes de que ese pulso haya golpeado algo y parte de él vuelve a medirse en el sensor. Normalmente también se mide la intensidad del pulso de retorno.
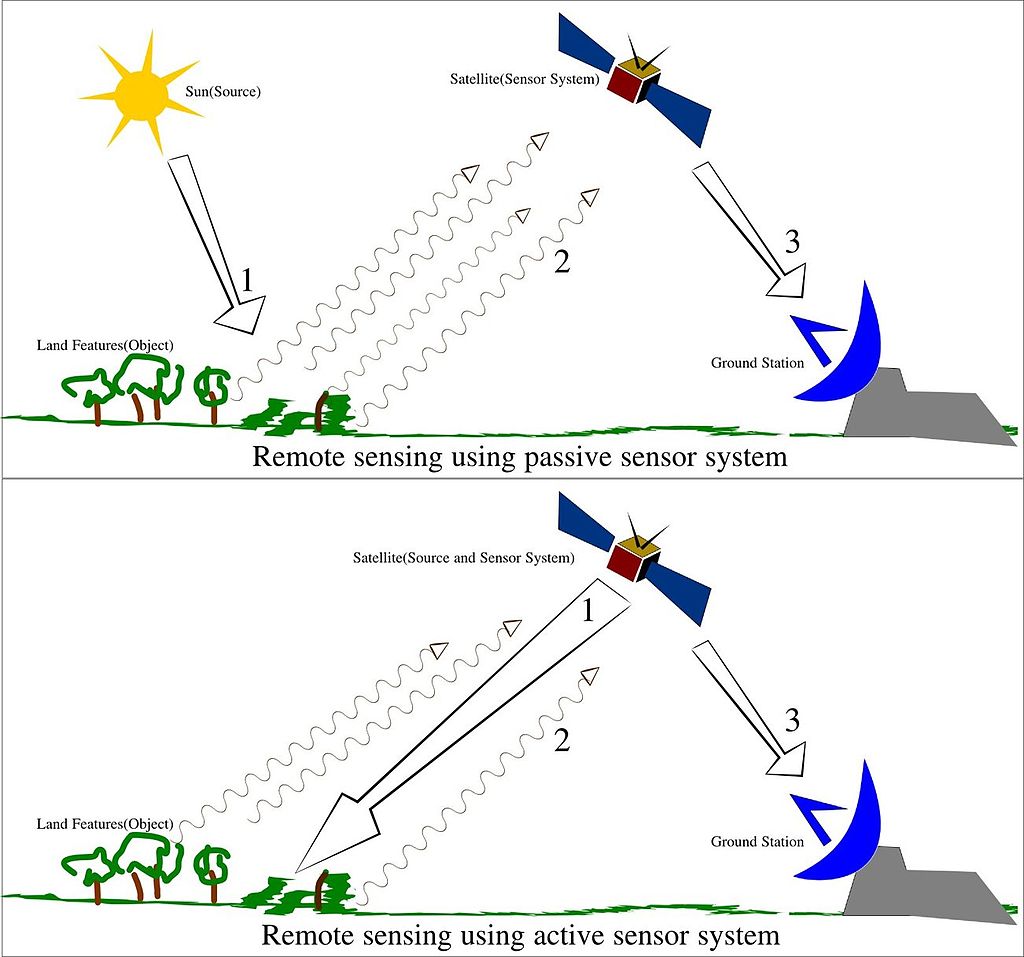
1: La diferencia entre los sistemas de teledetección pasiva y activa. Fuente: Ilustración de teledetección por Arkarjun, Wikimedia Commons, CC BY-SA 3.0.

2: Satélite de la NASA captura el huracán Earl el 1 de septiembre de 2010 por NASA Goddard Photo and Video, Flickr, CC BY 2.0.

3: Diagrama conceptual para LIDAR aerotransportado. La ubicación y orientación del instrumento es proporcionada por los instrumentos GPS e IMU en la aeronave. Con este conocimiento, las distancias medidas entre el instrumento y los objetos en el suelo se pueden convertir para encontrar las ubicaciones de esos objetos, proporcionando juntos una imagen 3D de la superficie de la Tierra. fis01335 por NOAA Fototeca, Flickr, CC BY 2.0.
Detección térmica
La detección térmica es similar a la detección óptica pasiva, excepto que la energía medida por el sensor está en la 'región térmica' del espectro de longitud de onda. Este es el tipo de detección térmica pasiva que haces tú mismo al poner las manos cerca de la fogata para sentir su calor, así podemos sentir radiación térmica pero no podemos verla con nuestros ojos como si pudiéramos ver la luz solar. El Sol produce mucha más radiación térmica que la Tierra (hace mucho más calor, después de todo), pero el Sol también está muy lejos, así que si construyes un sensor térmico y lo pones en un avión o en un satélite y lo apuntas hacia la Tierra, la radiación térmica emitida por la Tierra abruma las pequeñas cantidades de radiación térmica que ha llegado a la Tierra desde el Sol y que ha sido reflejada por la superficie de la Tierra hacia el sensor. Como resultado, la teledetección térmica es útil para medir la temperatura de la superficie de la Tierra.

4: Este mapa muestra la distribución de la Temperatura de la Superficie del Mar por un día en 2010. La Temperatura de la Superficie del Mar es medida rutinariamente por varios satélites, incluyendo MODIS Terra que produjo los datos que se muestran aquí. Mapa de Temperatura de la Superficie del Mar (NASA, Sport, 23/04/10) por el Centro de Vuelo Espacial Marshall de la NASA, Flickr, CC BY-NC 2.0.
Detección de microondas
Al entrar en los tipos de radiación que no podemos ver ni sentirnos, la detección por microondas es una parte importante de la teledetección. La Tierra emite constantemente pequeñas cantidades de radiación de microondas, y la detección pasiva por microondas puede ser útil de una manera algo análoga a la teledetección térmica, para medir características sobre la superficie de la Tierra (por ejemplo, donde hay nieve y hielo). La teledetección activa por microondas, también llamada detección remota por radar, utiliza pulsos de radar emitidos al igual que los radares en los barcos y en los aeropuertos. Los radares se montan en aviones o satélites y apuntan hacia la Tierra, se emiten pulsos de radar y se mide la parte reflejada de cada pulso para proporcionar información sobre aspectos de la superficie terrestre, la mayoría de los cuales no se pueden medir con tecnologías ópticas o térmicas. Estos incluyen información sobre el terreno de la Tierra (para hacer modelos digitales de elevación), la humedad del suelo, la densidad y estructura de la vegetación, y la presencia de hielo marino y barcos. La teledetección por radar tiene la ventaja de que la radiación de microondas se mueve a través de la atmósfera más o menos sin obstáculos, y debido a que es una tecnología activa se puede utilizar así en cualquier lugar y en cualquier momento, incluso durante la noche y con mal tiempo.

5: Una aplicación increíble de la teledetección por radar es una técnica llamada radar interferométrico de apertura sintética, o InSAR. Cuando un instrumento de radar pasa por la misma área durante dos órbitas diferentes, los cambios en la forma de la superficie de la Tierra pueden mapearse con precisión milimétrica. Por ejemplo, cuando ocurren los sismos se puede mapear el cambio en la superficie de la Tierra, como se muestra aquí para el terremoto de 2010 en Dinar, Turquía. Los cambios más pequeños que resultan de, por ejemplo, edificios que se hunden en el sustrato o puentes que se expanden y contraen en climas cálidos y fríos, también se pueden mapear con InSAR. Interferograma del dinar, Turquía sismo de 1995 por Gareth Funning, GeoDeSy Tools for Societal Issues (GETSI), CC BY-NC-SA 3.0.
Detección gravimétrica
Otro tipo de instrumento que se ha puesto en satélites con gran éxito midió el campo gravitatorio de la Tierra y cómo cambia espacialmente. La atracción gravitacional de la Tierra percibida por un satélite en órbita es más fuerte cuando el satélite pasa sobre un área con masa relativamente grande (por ejemplo, el Himalaya), a diferencia de un área con menos masa (por ejemplo, océanos profundos). Estas diferencias pueden medirse con mucha precisión y utilizarse no sólo para mapear la forma general del campo de gravedad de la Tierra, sino también para medir los cambios en él a través del tiempo. Dichos cambios son causados por las mareas (más agua equivale a más masa equivale a más gravedad), el derretimiento de los glaciares e incluso la disminución de las capas freáticas por el uso insostenible de las aguas subterráneas

6: Tierra conformada y coloreada según la atracción gravitacional medida por el satélite GOCE de la Agencia Espacial Europea. Ondulación geoide escala 10k por el Centro Internacional de Modelos Globales de la Tierra, Wikimedia Commons, CC BY 4.0.
Detección acústica
La detección acústica es fundamentalmente diferente de las tecnologías enumeradas anteriormente porque utiliza ondas acústicas (es decir, ondas que se forman como resultado de la compresión y expansión de las masas de agua) mientras que todas las demás utilizan radiación electromagnética (es decir, ondas que tienen un componente eléctrico y puede propagarse a través del espacio vacío). Si bien hay muchos usos de la detección acústica, principalmente mapeando la profundidad del agua, el fondo marino e incluso la estructura del subfondo marino, los instrumentos y su base física son suficientemente diferentes de las tecnologías enumeradas anteriormente que no los veremos más a fondo en este curso.

7: Los sensores acústicos pueden proporcionar información sobre la profundidad del agua y la composición del sustrato en grandes áreas, y proporcionar información detallada sobre la estructura del fondo marino en áreas específicas más pequeñas. Aquí se ve una reconstrucción 3D, basada en datos acústicos, de un avión de la Segunda Guerra Mundial ubicado frente a la costa del Reino Unido. Aviones en el fondo marino de Wessex Archaeology, Flickr, CC BY-NC-SA 2.0.
Sensores terrestres
Todas las tecnologías de teledetección se desarrollan y prueban inicialmente en laboratorios terrestres, donde se realiza la ciencia fundamental, se producen y prueban prototipos, se analizan los datos iniciales y se madura la tecnología. Si bien algunas son finalmente reconstruidas para su uso en una aeronave o en un satélite, estas tecnologías suelen retener su uso en tierra. Ejemplos bien conocidos incluyen las cámaras que están en los teléfonos inteligentes, las cámaras térmicas que utilizan los inspectores eléctricos para buscar circuitos defectuosos, los radares que usa la policía para comprobar qué tan rápido estás manejando, y los mentirosos que algunos autos autónomos usan para la conciencia situacional. Si bien los sensores terrestres son útiles para recopilar información muy precisa de un área u objeto pequeño, no son útiles para obtener los tipos de datos necesarios para el mapeo. Sin embargo, los datos producidos por instrumentos terrestres suelen ser útiles en el proceso de teledetección (por ejemplo, comparando lo que ve en una imagen de satélite con lo que midió en el suelo).
Sensores aerotransportados
Eventualmente, alguien tomará una tecnología terrestre y se preguntará '¿qué pasaría si tomara ese instrumento, lo metía en una aeronave, lo apuntara hacia abajo y lo encendiera?'. El advenimiento de la fotografía aérea siguió rápidamente después del desarrollo de la cámara cuando alguien decidió subir una cámara a un globo aerostático, y los sistemas de radar y lidar aerotransportados también siguieron el desarrollo de sus respectivas tecnologías sin mucha demora. Hay al menos dos desafíos que deben superarse al tomar un instrumento de teledetección en el aire. 1) El instrumento debe ser capaz de recopilar muchos datos rápidamente y almacenar estos datos para su uso posterior (o transmitirlos directamente a un dispositivo de almacenamiento en otro lugar), y 2) cada punto de datos recopilados debe ser típicamente georreferenciado — en otras palabras, un par de coordenadas geográficas (por ejemplo, latitud y longitud) debe estar asociado con cada punto de datos. Estos no son de ninguna manera desafíos insuperables hoy en día, cuando un teléfono inteligente típico puede actuar como almacenamiento de datos y GPS, y poner sensores en plataformas aerotransportadas se ha convertido recientemente en un área en crecimiento explosivo porque los drones baratos y fáciles de volar ahora pueden reemplazar a los aviones tripulados como la plataforma que lleva el instrumento.
Sensores espaciales
Después de que un instrumento haya demostrado ser útil cuando se monta en una aeronave, eventualmente alguien sugerirá que 'debemos tomar esto totalmente y ponerlo en un satélite, para que podamos recopilar datos continuamente durante años sin tener que aterrizar, repostar, presentar planes de vuelo y así sucesivamente'. De hecho, (que yo sepa) todos los satélites de observación de la Tierra llevan instrumentos cuyos prototipos fueron probados en aviones, porque esto no solo ayuda a afinar el hardware del instrumento antes de lanzarlo al espacio, también brinda a los científicos de teledetección una vista previa de cuáles serán los datos del instrumento como, para que puedan comenzar a escribir programas que procesen los datos del instrumento y convertirlos en información útil sobre la Tierra. Existen importantes ventajas y desventajas en el uso de satélites en comparación con los drones y los aviones tripulados. La gran ventaja es que los satélites suelen durar muchos años y pueden recopilar datos de forma continua durante ese periodo. Por lo tanto, son increíblemente rentables. ¡Imagínense lo que costaría proporcionar información actualizada diariamente sobre la cubierta de hielo marino en el Ártico (y en la Antártida para el caso) sin satélites! Sin embargo, los satélites tienen combustible limitado, y el espacio es un ambiente áspero por lo que los instrumentos a bordo se degradan con el tiempo y pueden finalmente fallar por completo. Por ejemplo, en 2012 el multimillonario satélite europeo ENVISAT dejó de comunicarse con su centro de mando, y a pesar de los mejores esfuerzos de la Agencia Espacial Europea para reanudar la comunicación el satélite con todos sus instrumentos fue declarado 'muerto' dos semanas después. Landsat 6, un satélite estadounidense de observación terrestre de propósito general, no logró alcanzar su órbita después del lanzamiento, y nunca produjo ningún dato en absoluto. Un problema importante con los satélites es que cuando suceden estas cosas, no pueden aterrizar y ser arreglados, como podría hacerse si se desarrollara un problema con un instrumento sentado en una aeronave.
Si bien la gran mayoría de los sensores basados en el espacio están ubicados en satélites, otras naves espaciales también han llevado algunos instrumentos importantes de teledetección. Un sistema de radar se colocó en un transbordador espacial en el año 2000 y se utilizó para producir un modelo de elevación digital casi global a una resolución espacial de 30 metros durante sus 11 días de operación. Recientemente, una compañía canadiense llamada UrtheCast operaba dos sensores ópticos pasivos de la Estación Espacial Internacional —uno era una cámara de video de ultra alta definición que producía video a tres fotogramas por segundo con una resolución espacial de 1.1 metros, el otro es un instrumento de imagen más típico que produjo imágenes en color a una resolución espacial de 5 metros.

8: Hoy en día hay un número notable de satélites de observación de la Tierra en órbita. Esta imagen muestra la constelación de satélites 'A-train' de la NASA, una serie de satélites cuyas órbitas se siguen de cerca entre sí, todos pasando por encima durante la tarde, hora solar local. Las constelaciones brindan la oportunidad de utilizar datos de un satélite para ayudar a la interpretación de datos de otro satélite, mejorando así la calidad de muchos productos satelitales. Atrain-879×485 por Shakibul Hasan Win, Wikimedia Commons, CC BY-SA 4.0.
Radiación electromagnética y sus propiedades
Ahora es el momento de mirar un poco más de cerca cómo funciona la teledetección y cuál es su base física. Eso le proporcionará una mejor comprensión de cómo se crean los datos de teledetección y cómo se pueden usar de manera creativa para extraer exactamente el tipo de información necesaria para un propósito específico.
La energía que es medida por un instrumento de teledetección (que no sean instrumentos acústicos), y que se utiliza para producir una imagen, se llama radiación electromagnética (a menudo abreviada como EMR). Puede ser difícil entender exactamente qué es la radiación electromagnética, pero una manera útil de pensarla es considerar que la luz es un tipo específico de radiación electromagnética, una que nuestros ojos y cerebro son buenos para detectar. Otros tipos de radiación electromagnética incluyen los dañinos rayos ultravioleta (UV) contra los que el protector solar brinda cierta protección, la radiación térmica que sentimos cuando nos movemos cerca de una fogata, y las ondas de radar utilizadas para detectar aviones y barcos (y para mapear algunas propiedades superficiales en la Tierra). Físicamente, la radiación electromagnética se puede visualizar como ondas que se propagan a través del espacio. Las ondas tienen dos componentes, uno eléctrico y otro magnético, que están en ángulos de 90 grados tanto entre sí como con respecto a la dirección de propagación (Figura 9).

9: La radiación electromagnética consiste en una onda transversal con un campo eléctrico (rojo, plano vertical) y un campo magnético (azul, plano horizontal), propagándose (en esta figura) en la dirección horizontal. Onda electromagnética de P.wormer, Wikimedia Commons, CC BY-SA 3.0.
Longitud de onda
Las ondas EMR tienen ciertas propiedades que podemos medir y usar para describirlas. Las ondas EMR se pueden caracterizar por su longitud de onda, que se mide como la distancia física entre un pico de onda y el siguiente, a lo largo de la dirección de propagación. Los ojos humanos son capaces de detectar radiación electromagnética con longitudes de onda aproximadamente en el rango entre 400 y 700 nanómetros (un nanómetro es de 10-9 metros, o una billonésima parte de un metro), que es por lo tanto lo que llamamos luz visible. Las ondas EMR se propagan a la velocidad de la luz, y existe una relación simple y directa entre la longitud de onda y la frecuencia de las ondas EMR, típicamente expresadas como c = νλ, donde c es la velocidad de la luz, v (la letra griega nu) es la frecuencia y λ (la letra griega lambda) es la longitud de onda. La frecuencia se define como el número de picos de onda que pasan un punto fijo por unidad de tiempo (típicamente por segundo). Tenga en cuenta que algunas personas, incluidos ingenieros y físicos que trabajan con radiación, a veces usan el número de onda en lugar de la longitud de onda o la frecuencia. El número de onda () se define como =1/λ. No vamos a utilizar el número de onda en el resto de estas notas, pero es bueno estar al tanto de su uso para estudios posteriores.
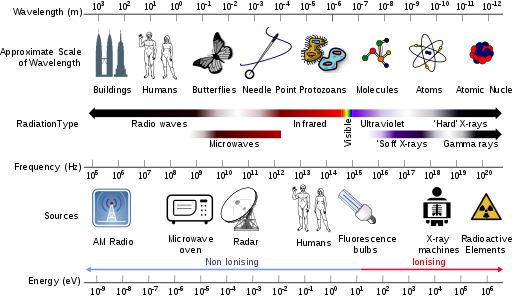
10: Una visión general de diferentes tipos de EMR, sus longitudes de onda, frecuencias y algunas fuentes comunes. Espectro electromagnético con fuentes de Dinksbumf, Inductiveload y NASA, Wikimedia Commons, CC BY-SA 3.0.
Según la teoría cuántica, la EMR también puede considerarse como consistente en una corriente de paquetes de energía individuales llamados fotones. Cada fotón contiene una cantidad de energía que es proporcional a su frecuencia, una relación expresada como e=Hv, donde h es la constante de Planck (aproximadamente 6.6 * 10-34 Js). La relación entre longitud de onda, frecuencia y energía por fotón se muestra en la Figura 10. También se encuentran en la Figura 10 los nombres comunes para EMR de cierta longitud de onda. Se puede ver, por ejemplo, que los rayos X tienen longitudes de onda muy cortas, frecuencias muy altas, y por lo tanto muy alto contenido de energía por fotón, lo cual es una razón importante para limitar su exposición a ellos.
Polarización
Además de la longitud de onda, la EMR se puede caracterizar por su polarización, la cual puede considerarse como la orientación de las oscilaciones del campo eléctrico. Por ejemplo, en la Figura 9, el campo eléctrico oscila exclusivamente en el plano vertical, por lo que se dice que la EMR mostrada en la figura está polarizada verticalmente. Muchas fuentes de EMR, como el Sol, producen ondas electromagnéticas cuya polarización cambia tan rápidamente en el tiempo que, cuando se mide, la combinación de muchas ondas parece no tener una polarización distinta. En otras palabras, la orientación de las oscilaciones del campo eléctrico (y por extensión del campo magnético) es vertical, horizontal, y cualquier cosa intermedia. Tal EMR se llama no polarizada. Otras fuentes de luz, como la creada por la mayoría de los instrumentos, está polarizada, lo que significa que la orientación de las oscilaciones del campo eléctrico no cambia con el tiempo. Un ejemplo familiar de polarización es la luz solar que se refleja en la superficie del agua. Cuando la luz no polarizada del Sol golpea la superficie del agua, las ondas cuyo campo eléctrico está orientado verticalmente son absorbidas o refractadas en el agua con mayor facilidad que aquellas cuyo campo eléctrico está orientado horizontalmente, las cuales tienen más probabilidades de reflejarse en la superficie del agua. Cuando miras una superficie de agua, las partes polarizadas horizontalmente de la luz que ves se han reflejado predominantemente en la superficie del agua, mientras que las partes polarizadas verticalmente de la luz que ves se han reflejado predominantemente desde el interior del agua misma, o desde el fondo si estás mirando aguas poco profundas. Por lo tanto, si usas gafas de sol polarizadas que han sido hechas para eliminar efectivamente la luz polarizada horizontalmente, la luz que llega a tus ojos es predominantemente esa parte del campo de luz que viene del interior del agua misma. Un ejemplo de esto se muestra en la Figura 11, donde se puede observar que el uso de un filtro de polarización permite que más detalle del fondo marino sea visible en la imagen.

11: Un ejemplo de mirar aguas poco profundas, sin (izquierda) o con (derecha) un filtro de polarización. Reflexión Polarizer2, de Amithshs, Wikimedia Commons, dominio público.
Cómo se crea la radiación electromagnética
Ahora que sabemos cuantificar diferentes propiedades de la radiación electromagnética, vamos a echar un breve vistazo a cómo se crea en primer lugar. Los físicos dicen que la EMR se produce cuando se aceleran las partículas cargadas, esto sucede todo el tiempo, por lo que no es útil en el contexto de la teledetección. De mayor uso en la teledetección, podemos observar el resplandor espectral creado por una superficie, es decir, la cantidad de radiación creada y su distribución a través de diferentes longitudes de onda. Esto depende principalmente de la temperatura de la superficie, y se describe cuidadosamente para los cuerpos negros por la Ley de Planck:

En la Ley de Planck, L λ, T es resplandor, con los subíndices indicando que depende de la longitud de onda y temperatura (de la superficie). h es la constante de Planck, c es la velocidad de la luz en un vacío, λ es longitud de onda, k B es la constante de Boltzmann (no debe confundirse con la Stefan- ¡Constante de Boltzmann!) , T es la temperatura superficial en grados Kelvin. Si bien la Ley de Planck inicialmente puede parecer intimidante, tenga en cuenta que h, c y k B son todas constantes, por lo que todo lo que dice es que la luminosidad emitida por una superficie (L λ, T) puede calcularse a partir de la temperatura (T) de esa superficie para una longitud de onda dada (λ).
Para echar un vistazo al resultado de la Ley de Planck, puedes imaginar un objeto con cierta temperatura superficial, como el Sol cuya temperatura es aproximadamente 5800K, y calcular el resplandor que emite a, digamos, 400nm, simplemente enchufando la temperatura y la longitud de onda en la ecuación. Luego puede repetir para 401nm, 402nm, y así sucesivamente, para producir lo que se llama una curva de Planck. Un ejemplo de varias curvas de Planck se proporciona en la Figura 12. Tenga en cuenta que se produce muy poca radiación a longitudes de onda muy cortas (por ejemplo, 0-200 nm), y cada curva tiene un pico distinto que muestra la longitud de onda a la que se emite la cantidad máxima de energía. La ubicación de este pico se puede calcular utilizando la Ley de Viena, que se basa en la Ley de Planck, y que dice que la longitud de onda de emisión máxima (λ max) se puede calcular como λ max =bT, donde b es la constante de desplazamiento de Wien: 2,897,767 nm K. Para el Sol, esto llega a aproximadamente 500 nm, lo que es luz azulado-verdosa.
Una nota importante sobre la Ley de Planck es que se aplica a los cuerpos negros, que son entidades imaginarias que se definen como absorbentes perfectos y emisores perfectos. Si bien los objetos del mundo real, como el Sol y la Tierra, no son cuerpos negros, se acercan lo suficiente a ser cuerpos negros la mayor parte del tiempo para que la Ley de Planck sea una aproximación útil que pueda usarse para cuantificar su emisión de radiación electromagnética. Qué tan cerca o lejos está una superficie de ser un cuerpo negro se define por su emisividad, que es la cantidad de luminosidad producida a una longitud de onda dada en comparación con la que produciría un cuerpo negro. Los materiales naturales tienden a tener altos valores de emisividad, en el rango de 0.98-0.99 (agua), 0.97 (hielo) y 0.95-0.98 (vegetación). Sin embargo, algunos materiales naturales pueden tener baja emisividad, como la nieve seca (aproximadamente 0.8) o la arena seca (0.7-0.8). Lo que esto significa, por ejemplo, es que la nieve seca a una temperatura dada sólo produce 80% del resplandor que debería según la Ley de Planck. Otra complicación se debe a que la emisividad cambia con la longitud de onda, pero eso es un puente para cruzar en otro momento.
La Ley de Planck puede ser utilizada para determinar la temperatura de una superficie cuyo resplandor espectral se mide. Esto se hace simplemente invirtiendo la ecuación para aislar la temperatura:

Si bien la determinación real de la temperatura superficial de la Tierra a partir de la medición espacial de la radiancia (espectral) es un poco más complicada porque es necesario tener en cuenta tanto la emisividad como la influencia de la atmósfera, la inversión de la Ley de Planck tal como se esbozó anteriormente es el principio básico sobre que tal mapeo descansa.

12: Ejemplo de tres curvas de Planck, para superficies a 3000-5000 grados Kelvin. Cuerpo negro de Darth Kule, Wikimedia Commons, dominio público.