
5.4: Velocidad de giro y ancho de banda de potencia
- Page ID
- 87938

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Como se señaló en la sección anterior, los amplificadores operacionales de propósito general contienen un condensador de compensación que se utiliza para controlar la respuesta de frecuencia de bucle abierto. La señal desarrollada a través de este condensador se amplificará para crear la señal de salida final. En esencia, este condensador sirve como carga para la etapa anterior dentro del amplificador operacional. Como todas las etapas, esta tiene una capacidad de salida de corriente finita. Debido a esto, el condensador de compensación se puede cargar no más rápido que una tasa determinada por la ecuación de carga del condensador estándar:
\[ i = C \frac{dv}{dt} \nonumber \]
\[ \frac{dv}{dt} = \frac{i}{C} \nonumber \]
La tasa de cambio de voltaje versus tiempo es\(dv/dt\). Por definición, este parámetro se llama tasa de respuesta (SR). La unidad base para la velocidad de giro es voltios por segundo, sin embargo, dada la velocidad de los dispositivos típicos, la velocidad de rotación normalmente se especifica en voltios por microsegundo. La velocidad de respuesta es muy importante ya que ayuda a determinar si un circuito puede amplificar con precisión formas de onda de alta frecuencia o de tipo pulso. Para crear un amplificador operacional rápido, la corriente de carga\(i\) debe ser grande o el condensador de compensación\(C\) debe ser muy pequeño. Debido a que\(C\) también juega un papel en la determinación del producto de ancho de banda de ganancia, hay un límite inferior para su tamaño. Un amplificador operacional típico podría usar un condensador de compensación de 30 pF, y la etapa de accionamiento puede producir efectivamente una corriente de carga de 100\(\mu\) A. La tasa de respuesta resultante sería:
\[ SR = \frac{dv}{dt} = \frac{i}{C} \nonumber \]
\[ SR = \frac{100 \mu A}{30 pF} \nonumber \]
\[ SR = 3.33 \text{ Megavolts/second} \nonumber \]
\[SR = 3.33 V/ \mu s \nonumber \]
Esto significa que la salida del amplificador operacional puede cambiar no más rápido que 3.33 V en el transcurso de un microsegundo. Le tomaría a este amplificador operacional unos 3 microsegundos para que su señal de salida cambie un total de 10 V. No puede ir más rápido que esto. El amplificador operacional ideal tendría una tasa de respuesta infinita. Si bien esto es una imposibilidad práctica, es posible encontrar dispositivos especiales de alta velocidad que exhiban velocidades de giro en el rango de varios miles de voltios por microsegundo. Las tasas de respuesta comparativas para algunos dispositivos seleccionados se encuentran en la Tabla\(\PageIndex{1}\).
| Dispositivo | Tasa de giro |
| UA741 | 0.5 V/\(\mu\) s |
| LF411 | 15 V/\(\mu\) s |
| OPA134 | 20 V/\(\mu\) s |
| LM318 | 70 V/\(\mu\) s |
| LM6364 | 300 V/\(\mu\) s |
| LT1363 | 1000 V/\(\mu\) s |
Mesa\(\PageIndex{1}\)
La tasa de respuesta siempre es referida a la salida. De esta manera, no es necesario tomar en cuenta la ganancia del circuito. La tasa de respuesta es normalmente la misma independientemente de si la señal es positiva o negativa. Hay algunos dispositivos que exhiben una tasa de respuesta asimétrica. Un ejemplo es el 3900. Tiene una tasa de respuesta de 0.5 V/\(\mu\) s para oscilaciones positivas, pero muestra 20 V/\(\mu\) s para oscilaciones negativas.
5.4.1: El efecto de la frecuencia de giro en las señales de pulso
Una forma de onda de pulso ideal cambiará de un nivel a otro instantáneamente, como se muestra en la Figura\(\PageIndex{1}\).
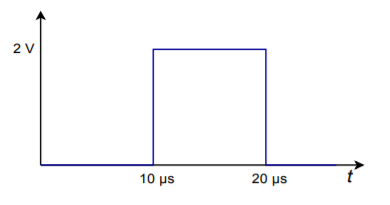
Figura\(\PageIndex{1}\): Salida ideal.
En realidad, los bordes ascendentes y descendentes están limitados por la tasa de giro. Si esta señal se alimenta a un amplificador operacional 741, el pulso de salida sería decididamente trapezoidal, como se muestra en la Figura\(\PageIndex{2}\). El 741 tiene una velocidad de giro de 0.5 V/\(\mu\) s. Debido a que el cambio de voltaje es de 2 V, tarda los 741 4\(\mu\) s en atravesar de bajo a alto, o de alto a bajo. Sin embargo, la forma de onda resultante es aún reconocible como un pulso.
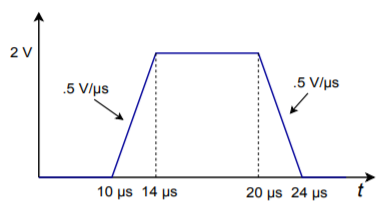
Figura\(\PageIndex{2}\): Salida girada del 741.
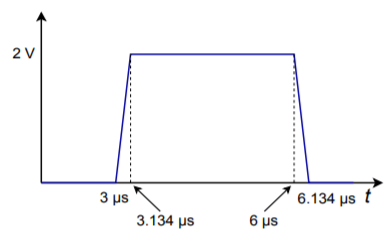
La distorsión bruta del pulso se produce si se disminuye la anchura del pulso, como en la Figura\(\PageIndex{3}\). Aquí, el ancho de pulso es de solo 3 microsegundos, por lo que el 741 ni siquiera tiene tiempo suficiente para alcanzar el nivel alto. En 3 microsegundos, el 741 solo puede cambiar 1.5 V. Para cuando el 741 llegue a 1.5 V, la señal de entrada ya está balanceando bajo, por lo que el 741 intenta rastrearlo. El resultado es una forma de onda triangular de amplitud reducida como se muestra en la Figura\(\PageIndex{4}\). Este mismo efecto puede ocurrir si se incrementa la amplitud del pulso. Obviamente, entonces, los pulsos que son rápidos y grandes requieren dispositivos de alta tasa de respuesta. Tenga en cuenta que un amplificador 411 op produciría una buena salida en este ejemplo. Debido a que su velocidad de respuesta es de 15 V/\(\mu\) s, solo requiere 0.134 microsegundos para el swing de salida de 2 V. Su forma de onda de salida se muestra en la Figura\(\PageIndex{5}\).
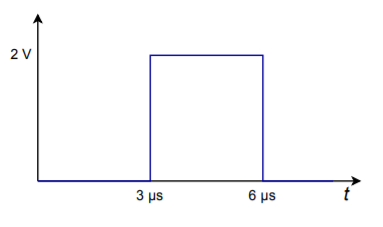
Figura\(\PageIndex{3}\): Salida ideal.
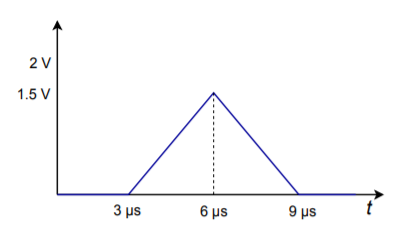
Figura\(\PageIndex{4}\): Salida girada del 741.
Figura\(\PageIndex{5}\): Salida girada del 411.
5.4.2: El efecto de la velocidad de giro en las señales sinusoidales y el ancho de banda de potencia
La limitación de la velocidad de giro produce un efecto obvio en las señales de pulso. La limitación de la velocidad de giro también puede afectar a las señales sinusoidales. Todo lo que se requiere para que tenga lugar el giro es que la señal cambie más rápido que la velocidad de giro del dispositivo. Si la velocidad de cambio de la señal nunca es mayor que la velocidad de giro, nunca ocurrirá el giro. Para saber qué tan rápido cambia una onda sinusoidal dada, necesitamos encontrar la primera derivada con respecto al tiempo. Supongamos que la onda sinusoidal de entrada tiene una frecuencia\(f\) y una amplitud pico\(K\).
\[ v(t) = K \sin 2\pi f t \nonumber \]
\[ \frac{dv}{dt} = 2\pi f K \cos 2 \pi f t \nonumber \]
La tasa de cambio de la señal con respecto al tiempo es\(dv/dt\). La tasa máxima de cambio ocurrirá cuando la onda sinusoidal pase por cero (es decir, a t = 0). Para encontrar este valor máximo, sustituya 0 in por t, y resuelva la ecuación.
\[ \frac{dv}{dt} =2\pi f K \label{5.10} \]
Entonces, la tasa de cambio de la señal es directamente proporcional a la frecuencia de la señal (\(f\)), y su amplitud (\(K\)). A partir de esto, es evidente que las señales de alta amplitud y alta frecuencia requieren amplificadores operacionales de alta tasa de giro para evitar la rotación. Podemos reescribir nuestra Ecuación de una forma más conveniente:
\[ \text{ Slew Rate required }=2 \pi V_p f_{max} \label{5.11} \]
donde\(V_p\) se requiere la oscilación de voltaje pico y\(f_{max}\) es la onda sinusoidal de frecuencia más alta reproducida. A menudo, es deseable saber qué tan “rápido” es un amplificador operacional dado. Una nueva reorganización de los rendimientos
\[ f_{max} = \frac{\text{Slew Rate}}{2 \pi V_p} \nonumber \]
En este caso,\(f_{max}\) representa la onda sinusoidal de mayor frecuencia que el amplificador operacional puede reproducir sin producir distorsión inducida por giro (SID). Esta frecuencia se conoce comúnmente como el ancho de banda de potencia. Para estar en el lado conservador,\(V_p\) establezca el nivel de recorte del amplificador operacional. Tenga en cuenta que los cálculos de velocidad de respuesta no dependen ni de la ganancia del circuito ni del ancho de banda de señal pequeña. El ancho de banda eléctrico y el ancho de banda de señal pequeña (\(f_2\)) no son lo mismo. ¡Este es un punto muy importante!
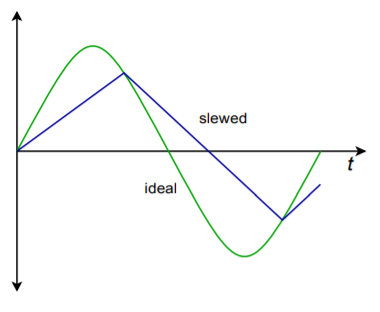
Figura\(\PageIndex{6}\): Onda sinusoidal distorsionada por giro pesado.
Los efectos de la matanza pueden ser sutiles o dramáticos. Pequeñas cantidades de SID son muy difíciles de ver directamente en un osciloscopio y requieren el uso de un analizador de distorsión o un analizador de espectro para su verificación. El giro pesado convertirá una onda sinusoidal en una onda triangular. Un ejemplo de esto se muestra en la Figura\(\PageIndex{6}\).
Ejemplo\(\PageIndex{1}\)
Un 741 se utiliza como parte de un sistema de control de motor. Si la frecuencia reproducible más alta es de 3 kHz y el nivel de salida máximo es de 12 V pico, ¿alguna vez ocurre la rotación?
Otra forma de afirmar el problema es preguntar “¿Es el ancho de banda de potencia del 741 al menos 3 kHz?”
\[ f_{max} = \frac{Slew Rate}{2\pi V_p} \nonumber \]
\[ f_{max} = \frac{0.5V/\mu s}{2 \pi \times 12 V} \nonumber \]
\[ f_{max} = \frac{0.5 MV/s}{\pi \times 24 V} \nonumber \]
\[ f_{max} = 6631 Hz \nonumber \]
Para esta aplicación, el 741 es el doble de rápido de lo necesario. Anote en el cálculo cómo se transfiere la tasa de respuesta de V/\(\mu\) s a V/s, y cómo las unidades de voltios cancelan entre denominador y numerador. Esto deja unidades de “1/segundos”, que es otra forma de decir “Hertz”. Si el cálculo produjo un valor menor, digamos 2 kHz, entonces el giro es una posibilidad para ciertas señales.
Ejemplo\(\PageIndex{2}\)
Un preamplificador de audio necesita reproducir señales de hasta 20 kHz. La oscilación de salida máxima es de 10 V pico. ¿Cuál es la tasa de respuesta mínima aceptable para el amplificador operacional utilizado?
\[ \text{Slew Rate }= 2\pi V_p f_{max} \nonumber \]
\[ \text{Slew Rate } = 2\pi \times 10 V\times 20 kHz \nonumber \]
\[ \text{Slew Rate } = 1.257 MV/s \nonumber \]
\[ \text{Slew Rate } = 1.257 V/\mu s \nonumber \]
Para este diseño, un 741 no sería lo suficientemente rápido. El mencionado 411 al 318 sería sin duda satisfactorio, mientras que el 1363 probablemente sería excesivo.
Simulación por Computadora
Para verificar los resultados del Ejemplo\(\PageIndex{2}\), se puede usar un amplificador de voltaje no inversor simple con diferentes modelos de amplificador operacional. La simulación se muestra Figura\(\PageIndex{7}\) usando Multisim.
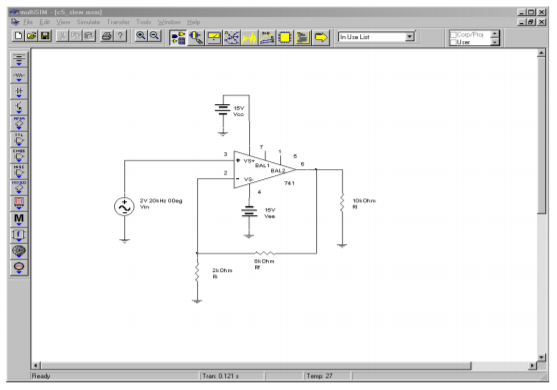
Figura\(\PageIndex{7a}\): Esquema Multisim para simulación de giro.
El circuito está configurado con una entrada de 2 voltios a 20 kHz y una ganancia de 5. Esto producirá la salida en el peor caso de 10 voltios a 20 kHz. Para el primer Análisis Transitorio se utiliza un 741. Observe cómo la forma de onda de salida es esencialmente triangular. También se encuentra por debajo del nivel de salida pico esperado. Claramente, esta forma de onda está severamente girada, y da como resultado una distorsión no deseada y una reducción en la calidad de audio.
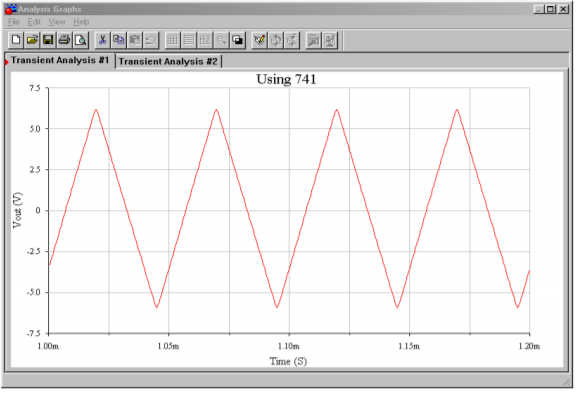
Figura\(\PageIndex{7b}\): Salida con 741.
La segunda simulación se realiza utilizando el LF411 más rápido. En este caso, la simulación muestra una salida máxima completa de 10 voltios sin distorsión discernible. El LF411 ciertamente cumpliría con los requisitos del circuito.

Figura\(\PageIndex{7c}\): Salida con LF411.
5.4.3: Pista de diseño
Existe una manera conveniente de determinar gráficamente si la salida de un amplificador operacional se distorsionará. Implica graficar los niveles de salida versus frecuencia. Las dos causas principales de distorsión son el recorte y el giro. Comenzamos con una red que mide la frecuencia en el eje horizontal, y el voltaje de salida en el eje vertical. El primer paso consiste en trazar el límite de nivel de salida impuesto por el recorte. El recorte depende de la fuente de alimentación del circuito y es independiente de la frecuencia. Por lo tanto, se dibuja una línea horizontal a través de la gráfica a nivel de recorte (ver Figura\(\PageIndex{8}\)). Si asumimos una fuente de alimentación estándar de\(\pm\) 15 V, este nivel será alrededor de\(\pm\) 13 V. El nivel de salida no puede oscilar por encima de esta línea porque el recorte será el resultado. Todo por debajo de esta línea representa señales desrecortadas. El segundo paso es trazar la línea de giro. Para ello, se necesita calcular un punto para\(f_{max}\). En el Ejemplo se utilizó\(\PageIndex{1}\) un 741 y 12 V produjo un fmax de 6631 Hz. Trazar este punto en la gráfica. Ahora, como la tasa de respuesta es directamente proporcional a\(f_{max}\) y\(V_p\), se deduce que duplicar\(f_{max}\) mientras se reduce a la mitad\(V_p\) da como resultado la misma tasa de respuesta. Este nuevo punto permite determinar gráficamente la pendiente de la línea limitadora de giro. Trace este nuevo punto y conecte los dos puntos con una línea recta (ver Figura\(\PageIndex{9}\)). Todo por encima de esta línea representa señales giradas, y todo lo que está por debajo de esta línea representa señales no giradas. Siempre que la señal de salida deseada caiga dentro del área de intersección inferior de las dos líneas, la señal no experimentará giro ni recorte. Un rápido vistazo a la gráfica le permite decir qué formas de distorsión pueden afectar a una señal determinada.
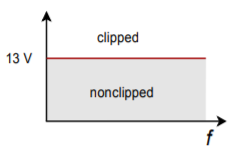
Figura\(\PageIndex{8}\): Límite debido al recorte.
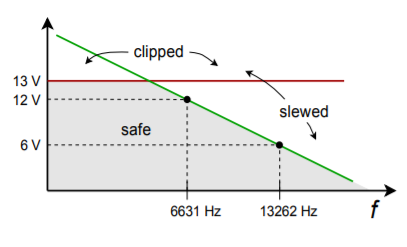
Figura\(\PageIndex{9}\): Límites por recorte y giro.
5.4.4: Tasa de giro y múltiples etapas
Considere el circuito de tres etapas que se muestra en la Figura\(\PageIndex{10}\). Las tasas de respuesta para cada dispositivo se encuentran en la Tabla\(\PageIndex{1}\). ¿Cuál es la tasa de respuesta efectiva del sistema? Se podría pensar que lo establece el dispositivo más lento (741 a 0.5 V/\(\mu\) s), o quizás por el dispositivo final (318 a 70 V/\(\mu\) s). El caso es que la tasa de giro del sistema podría ser establecida por cualquiera de los dispositivos, y depende de las ganancias de las etapas.
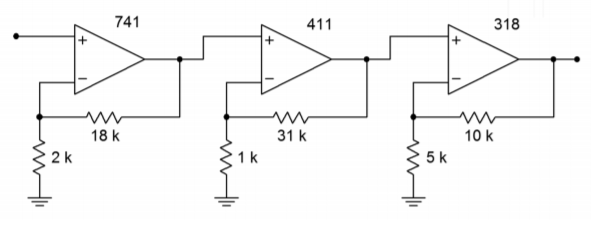
Figura\(\PageIndex{10}\): Circuito multietapa que incorpora los 741, 411 y 318.
Lo único que puedes decir de inmediato es que la tasa de rotación del sistema nunca será más rápida que la del dispositivo final. En este ejemplo, la tasa de rotación no puede ser mayor a 70 V/\(\mu\) s. Sin embargo, puede ser menor que esta. El truco para encontrar la tasa de respuesta efectiva del sistema es comenzar en la salida de la primera etapa, y luego determinar la tasa máxima de cambio para las siguientes etapas en secuencia. Al observar la etapa 1, su tasa de salida máxima es de 0.5 V/\(\mu\) s. Esta es la tasa máxima de cambio que entra en la etapa 2. Debido a que la etapa 2 tiene una ganancia de 32, intentará aumentar esta tasa a 16 V/\(\mu\) s. Esto no puede suceder, sin embargo, porque el 411 tiene una tasa de respuesta de solo 15 V/\(\mu\) s. Por lo tanto, el 411 es el factor limitante en este punto. La tasa máxima de cambio fuera de la etapa 2 es de 15 V/\(\mu\) s. Esta señal se aplica entonces a la etapa 3, que tiene una ganancia de 3. Entonces, el 318 triplica su señal de entrada a 45 V/\(\mu\) s. Debido a que el 318 es capaz de cambiar tan rápido como 70 V/\(\mu\) s, 45 V/\(\mu\) s se convierte en el factor de salida limitante. La tasa de rotación del sistema es de 45 V/\(\mu\) s. Este es el valor utilizado para calcular el ancho de banda de potencia del sistema, si es necesario. El primer amplificador operacional que se activa en este circuito es el 411, aunque es aproximadamente 30 veces más rápido que el 741 utilizado en la etapa 1. La razón de esto es que debe manejar señales 32 veces más grandes. Obsérvese que si la etapa final tuviera una ganancia mayor, digamos 5, el 318 se convertiría en el factor limitante. Lo importante a recordar es que las etapas frontales de un sistema no necesitan ser tan rápidas como las etapas finales, ya que manejan señales más pequeñas.
5.4.5: Dispositivos no compensados
Como se discutió en el Capítulo Tres, todos los amplificadores operacionales necesitan algún tipo de compensación de frecuencia para garantizar que su respuesta de bucle cerrado sea estable. La forma más sencilla de hacerlo es agregar un condensador de compensación, que obliga a un vuelco de 20 dB/década a\(f_{unity}\). De esta manera, no importa qué ganancia elijas, el circuito será estable. Aunque esto es muy conveniente, no es la forma de compensación más eficiente para cada circuito. Los circuitos de alta ganancia necesitan menos capacitancia de compensación que un circuito de baja ganancia. La ventaja de usar un condensador de compensación más pequeño es que se incrementa la velocidad de giro. Además, se incrementa la ganancia de bucle disponible a frecuencias más altas. Esto permite que el circuito resultante tenga un ancho de banda de señal pequeña más amplio (el efecto es como si\(f_{unity}\) aumentara). Por lo tanto, si está diseñando un circuito de alta ganancia, no está produciendo la velocidad máxima de respuesta y el ancho de banda de señal pequeña que podría. El condensador de compensación es lo suficientemente grande como para lograr estabilidad de ganancia unitaria, pero su circuito es un diseño de alta ganancia. La conclusión es que estás “pagando” por la estabilidad de ganancia de unidad con velocidad de giro y ancho de banda.
Para sortear esto, los fabricantes ofrecen amplificadores operacionales no compensados. No se utiliza ningún condensador interno. En su lugar, las conexiones se llevan al paquete IC para que pueda agregar su propio condensador. De esta manera, el amplificador operacional se puede adaptar a su aplicación. No hay una forma establecida de determinar los valores para el circuito de compensación externo (puede ser más complejo que un solo condensador). Los detalles de compensación se dan en las hojas de datos del fabricante. Un ejemplo de un amplificador operacional no compensado es el 301. Se puede pensar en un 301 como un 741 sin condensador de compensación. Si se usa un condensador de compensación de 33 pF, el 301 será estable de ganancia unitaria y producirá una velocidad\(f_{unity}\) de 1 MHz y una velocidad de giro de 0.5 V/\(\mu\) s. Para mayores ganancias, se puede usar un condensador más pequeño. Una unidad de 10 pF producirá una efectividad\(f_{unity}\) de 3 MHz y una tasa de giro de 1.5 V/\(\mu\) s. Las gráficas de ganancia de Bode comparativas se muestran en la Figura\(\PageIndex{11}\) para el 301.
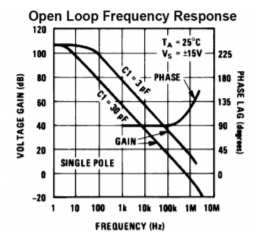
Figura\(\PageIndex{11}\): Gráficas de ganancia de Bode para el 301. Reimpreso cortesía de Texas Instrutments
5.4.6: Compensación Feedforward
Además de la forma ordinaria de compensación, los dispositivos no compensados como el 301 pueden utilizar otros métodos que pueden hacerlos aún más rápidos, como la compensación de avance. El concepto de feedforward está en contraste directo con la retroalimentación. Como su nombre indica, feedforward implica agregar una porción de la señal de entrada a la salida, evitando así ciertas secciones del sistema. En comparación con la retroalimentación ordinaria, la alimentación directa rara vez se usa como parte del diseño de un amplificador 1.
Normalmente, un condensador de compensación debe ser lo suficientemente grande como para mantener suficiente ganancia y margen de fase para la etapa más lenta dentro de un amplificador operacional. Muy a menudo, la etapa más lenta en un amplificador operacional es una de las primeras etapas, como un desplazador de nivel. Aquí es donde entra en juego el feedforward. Si el contenido de alta frecuencia de la señal de entrada se puede derivar alrededor de esta etapa lenta, el ancho de banda efectivo y la velocidad del amplificador operacional pueden aumentarse. Esta es la clave detrás de la técnica de compensación feedforward. Normalmente, los fabricantes proporcionarán detalles de realizaciones específicas de feedforward para sus amplificadores operacionales. (Sería muy difícil crear diseños de feedforward exitosos sin un conocimiento detallado del diseño interno del amplificador operacional específico que se está utilizando). No todos los amplificadores operacionales se prestan a técnicas de feedforward.
En resumen, los amplificadores operacionales no compensados requieren un poco más de trabajo para configurar que los dispositivos completamente compensados, pero ofrecen un mayor rendimiento. Esto significa velocidades de respuesta más rápidas y frecuencias de ruptura superiores más altas.
5.4.7: Dispositivos descompensados
A caballo entre los mundos de los amplificadores operacionales compensados y no compensados se encuentra el dispositivo descompensado. Los dispositivos descompensados también se conocen como dispositivos parcialmente compensados. Incluyen alguna capacitancia de compensación, pero no suficiente para que sean estables la ganancia de unidad. Por lo general, estos dispositivos son estables para ganancias superiores a 3 a 5. Debido a que la mayoría de las aplicaciones requieren ganancias en esta área o superiores, los dispositivos descompensados ofrecen la facilidad de uso de los dispositivos compensados y el mayor rendimiento de las unidades personalizadas no compensadas. Si es necesario, generalmente se puede agregar capacitancia adicional para que la ganancia de la unidad del circuito sea estable. Un ejemplo de este tipo es el 5534. Su gráfica Bode de ganancia se muestra en la Figura\(\PageIndex{12}\). Observe cómo la adición de un extra de 22 pF reduce la ganancia de bucle abierto. Este 22 pF es suficiente para que la ganancia de unidad del dispositivo sea estable. También tiene un efecto dramático en la tasa de respuesta, como se ve en la hoja de especificaciones del 5534. Sin el condensador de 22 pF, la velocidad de giro es de 13 V/\(\mu\) s, pero con él, la velocidad de giro cae a 6 V/\(\mu\) s. El rendimiento que renuncias para lograr la estabilidad de ganancia unitaria es obvio aquí.
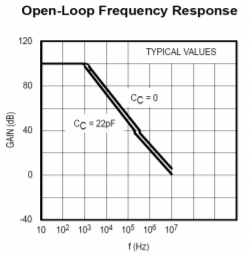
Figura\(\PageIndex{12}\): Gráfica de ganancia de Bode para el 5534. Reimpreso cortesía de Philips Semiconductors
Hay un ítem más interesante a anotar sobre el 5534. Una mirada cercana a la curva de ganancia de Bode muestra una joroba en la región de vuelco. Algunos otros dispositivos, como el 318, también exhiben esta joroba. Este es un buen extra. En esencia, el fabricante ha podido lograr una ganancia de bucle abierto ligeramente mayor de lo que permitiría un dispositivo normal. Esto significa que sus circuitos tendrán mayores ganancias de bucle, y por lo tanto, los buenos efectos de la retroalimentación negativa permanecerán activos a frecuencias más altas. Esto también significa que los circuitos de ganancia muy alta podrán lograr una ganancia\(f_2\) mayor de lo previsto por el cálculo de ancho de banda de ganancia.
Referencias
1 Sin embargo, puede ofrecer ventajas similares, como una reducción en la distorsión. Además, las técnicas de feedforward y feedback pueden combinarse para lograr aumentos complementarios en el rendimiento. Para un ejemplo, véase M.J.Hawksford, “Reducción de la distorsión dependiente de impedancia de pendiente de transistor en amplificadores de señal grandes”, Journal of the Audio Engineering Society, Vol.36 No.4 (1988): 213—222