
14.3: Simetrías continuas y generadores infinitesimales
- Page ID
- 81861
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Definición de Generador Infinitesimal
Las transformaciones de simetría pueden describirse como transformaciones de las variables independientes y dependientes. Las transformaciones continuas de simetría pueden describirse como transformaciones de estas variables que dependen de un parámetro, posiblemente infinitesimal, ε.
\[t \rightarrow \tilde t= F(\varepsilon)t \nonumber \]
\[y \rightarrow \tilde y= F(\varepsilon)y \nonumber \]
El operador\(F(\varepsilon)\) describe la transformación. Es una función del parámetro infinitesimal\(\varepsilon\), y también puede depender de\(t\) y\(y\). Además, es un operador, lo que significa que puede implicar operaciones derivadas.
Estamos considerando solo simetrías continuas, por lo que podemos estudiar el comportamiento en el límite como\(\varepsilon \rightarrow 0\). El operador se\(F(\varepsilon)\) puede escribir como una serie Taylor en el parámetro pequeño\(\varepsilon\).
\[F(\varepsilon) = 1 + \varepsilon U + \frac{1}{2!}\varepsilon^2U^2 + \ldots \nonumber \]
El término\(U\) en la expansión anterior se llama generador infinitesimal. Se puede separar en dos componentes.
\[U = \xi \partial_t + \eta \partial_y \nonumber \]
La función\(\xi\) describe la variación infinitesimal en la variable independiente. La función\(\eta\) describe la variación infinitesimal en la variable dependiente, y se introdujo en la Sec. 11.3. Ambos\(\xi\) y\(\eta\) pueden depender tanto de la variable independiente como de la variable dependiente.
\[\xi = \xi (t,y) \nonumber \]
\[\eta = \eta (t,y) \nonumber \]
En el límite de\(\varepsilon \rightarrow 0\), podemos ignorar términos de orden\(\varepsilon^2\) o superiores.
\[F(\varepsilon) \approx 1 + \varepsilon U \nonumber \]
Un generador infinitesimal describe una transformación continua de simetría. Si conocemos un generador infinitesimal para alguna simetría continua, podemos encontrar la transformación correspondiente
\[t \rightarrow e^{\varepsilon U}t \quad \text{ and } \quad y \rightarrow e^{\varepsilon U}y. \label{14.3.8} \]
Para entender de dónde proviene esta relación entre generadores infinitesimales y transformaciones finitas, considere la expansión Taylor de\(e^{\varepsilon U}\) [14, p. 33].
\[e^{\varepsilon U} = 1 + \epsilon U + \frac{1}{2!}(\varepsilon U)^2 + \frac{1}{3!}(\varepsilon U)^3 + \ldots \nonumber \]
En el límite como\(\varepsilon \rightarrow 0\),
\[e^{\varepsilon U} \approx 1 + \varepsilon U. \nonumber \]
Por lo tanto, la correspondiente transformación infinitesimal para\(\varepsilon \rightarrow 0\) viene dada por
\[t \rightarrow t (1+\varepsilon \xi) \nonumber \]
\[y \rightarrow y (1+\varepsilon \eta). \nonumber \]
Generadores Infinitesimales de la Ecuación de Onda
Como ejemplo, considere los generadores infinitesimales de la ecuación de onda
\[\frac{d^2y}{dt^2} + \omega_0^2y = 0 \label{14.3.13} \]
Como se mencionó anteriormente, la ecuación de onda contiene una simetría continua de la forma\(t \rightarrow t + \varepsilon\). Esta transformación continua de simetría tiene la forma
\[t \rightarrow t(1+\varepsilon \xi) \quad \text { and } \quad y \rightarrow y(1+\varepsilon \eta) \nonumber \]
con\(\xi = 1\) y\(\eta = 0\). Puede ser descrito por el generador infinitesimal
\[U = \xi \partial_t + \eta \partial_y = \partial_t. \nonumber \]
De manera más general, los generadores infinitesimales y las transformaciones finitas están relacionadas por la Ecuación\ ref {14.3.8}, por lo que las transformaciones finitas pueden derivarse de generadores infinitesimales.
\[t \rightarrow \left(e^{\varepsilon \partial_t}\right) t = \left(1+\varepsilon \partial_{t}+\frac{1}{2 !} \left(\varepsilon \partial_{t}\right)^{2}+ \ldots \right) t = t+\varepsilon \nonumber \]
\[y \rightarrow \left(e^{\varepsilon \partial_t}\right) y = \left(1+\varepsilon \partial_{t}+\frac{1}{2 !} \left(\varepsilon \partial_{t}\right)^{2}+ \ldots \right) y = y. \nonumber \]
Si bien la transformación de simetría se dio en este ejemplo, a continuación veremos un procedimiento para derivar generadores infinitesimales para una ecuación.

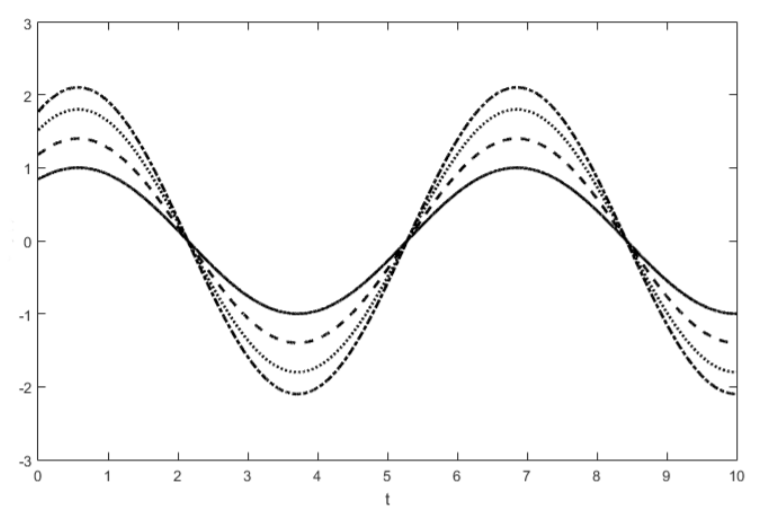
En general, si conocemos una solución a una ecuación y sabemos que una simetría está presente, podemos derivar toda una familia de soluciones relacionadas a la ecuación sin tener que pasar por el trabajo de resolver la ecuación nuevamente. La ecuación de onda, Ecuación\ ref {14.3.13}, tiene soluciones de la forma
\[y(t) = c_0 \cos (\omega_0t) + c_1 \sin (\omega_0t) \label{14.3.18} \]
donde las condiciones de contorno determinan las constantes\(c_0\) y\(c_1\). La simetría descrita por el generador infinitesimal nos\(U = \partial t\) dice que
\[y(t) = c_0 \cos (\omega_0(t+ \varepsilon)) + c_1 \sin (\omega_0 (t+ \varepsilon)) \label{14.3.19} \]
también debe ser una solución. Usando la ecuación\ ref {14.3.18}, hemos encontrado una familia de soluciones relacionadas porque la ecuación\ ref {14.3.19} es una solución para todas las constantes finitas o infinitesimales\(\varepsilon\). La figura\(\PageIndex{1}\) ilustra esta idea. La solución conocida se muestra como una línea continua. Las líneas punteadas y discontinuas ilustran soluciones relacionadas, para diferentes\(\varepsilon\) valores constantes. Encontramos la ecuación de onda en el ejemplo de resorte de masa de la Sección 11.4 y el ejemplo de inductor de condensador de la Sección 11.5, por lo que el análisis de simetría proporciona información sobre ambos procesos de conversión de energía. Nos dice que si ejecutamos el proceso de conversión de energía y encontramos un camino físico\(y(t)\), entonces para condiciones de límite apropiadas, también\(y(t + \varepsilon)\) es un camino físico. Esta simetría está presente en todos los sistemas invariantes de tiempo. Cualitativamente para el ejemplo de primavera masiva, nos dice que si conocemos el camino que toma la masa cuando hoy quitamos la restricción, entonces conocemos el camino que toma la masa cuando repetimos el experimento mañana, y conocemos esta idea a partir del análisis de simetría sin tener que volver a analizar el sistema.
Todas las ecuaciones lineales, incluyendo la ecuación de onda, contienen una transformación continua de simetría descrita por el generador infinitesimal
\[U = y\partial_y \nonumber \]
que corresponde a\(\xi = 0\) y\(\eta = y\). Nuevamente, podemos encontrar la transformación finita correspondiente usando la Ecuación\ ref {14.3.8}.
\[t \rightarrow \left(e^{\varepsilon y \partial_y}\right) t = \left(1+\varepsilon y \partial_{y} +\frac{1}{2 !} \left(\varepsilon y \partial_{y}\right)^{2} + \ldots \right) t = t \nonumber \]
y
\[y \rightarrow \left(e^{\varepsilon y \partial_y}\right) y = \left(1+\varepsilon y \partial_{y} +\frac{1}{2 !} \left(\varepsilon y \partial_{y}\right)^{2}+ \ldots \right) y = y(1+ \varepsilon). \nonumber \]
Para resumir esta transformación,
\[t \rightarrow t \nonumber \]
y
\[y \rightarrow y(1 + \varepsilon) \nonumber \]
La transformación anterior dice que si escalamos cualquier solución de una ecuación lineal\(y(t)\),, por una constante\((1 + \varepsilon)\), el resultado también será una solución de la ecuación. Por definición, una ecuación lineal obedece exactamente a esta propiedad. Al conocer una solución de la ecuación de onda y esta simetría, podemos encontrar toda una familia de soluciones relacionadas, y esta familia de soluciones se ilustra en la Figura\(\PageIndex{2}\).
La ecuación de onda también contiene la transformación de simetría descrita por el generador infinitesimal
\[U = \sin (\omega_0t) \partial_y. \nonumber \]
Los operadores y η pueden ser identificados directamente desde el generador infinitesimal.
\[\xi = 0 \nonumber \]
\[\eta = \sin (\omega_0t) \nonumber \]
Nuevamente podemos encontrar las transformaciones finitas correspondientes usando la Ecuación 14.3.8.
\[t \rightarrow e^{\varepsilon U}t =t \nonumber \]
\[y \rightarrow e^{\varepsilon U} y = \left(1+\varepsilon \sin (\omega_0t) \partial_{y} +\frac{1}{2 !} \left(\varepsilon \sin (\omega_0t) \partial_{y}\right)^{2} + \ldots \right) y \nonumber \]
\[y \rightarrow y + \varepsilon \sin (\omega_0t) \nonumber \]
Si conocemos una solución\(y(t)\) a la ecuación de onda, esta transformación nos dice que también\(y(t) + \varepsilon \sin (\omega_0t)\) es una solución. Dado que\(\varepsilon\) puede ser cualquier constante infinitesimal o finita, hemos encontrado otra familia de soluciones utilizando conceptos de simetría, y estas soluciones se ilustran en la Figura\(\PageIndex{3}\).

En esta sección, hemos discutido tres de las simetrías de la ecuación de onda. La ecuación de onda en realidad contiene ocho transformaciones continuas de simetría. Derivar estas transformaciones se deja como un problema de tarea.
Conceptos de Teoría de Grupos
El estudio de las simetrías de ecuaciones cae bajo una rama de las matemáticas llamada teoría de grupos. Cuando los matemáticos usan la palabra grupo, tienen algo específico en mente. Un grupo es un conjunto de elementos junto con una operación que combina dos elementos. La operación se llama multiplicación grupal, pero puede o no ser la operación de multiplicación familiar desde la aritmética. Para ser un grupo, los elementos y la operación deben obedecer cuatro propiedades adicionales: identidad, inversa, asociatividad y cierre [14, p. 7] [164, p. 14]. Un grupo se denomina grupo Lie si todos los elementos son continuamente dierentiables [164, p. 14].
| Nombre de la propiedad del grupo | Resumen de la propiedad |
|---|---|
| Identidad | \(X_1 \cdot X_{id} = X_1\) |
| Inversa | \(X_1 \cdot X_1^{-1} = X_{id}\) |
| Asociatividad | \((X_1 \cdot X_2) \cdot X_3 = X_1 \cdot (X_2 \cdot X_3)\) |
| Cierre | \(X_1 \cdot X_2\)es un elemento del grupo |
La primera propiedad de los elementos del grupo es la propiedad de identidad que dice que cada grupo debe tener un elemento de identidad,\(X_{id}\). Cuando el elemento de identidad se multiplica por cualquier otro elemento de grupo, el resultado es ese otro elemento. La propiedad inversa dice que cada elemento del grupo debe tener un elemento inverso correspondiente que también está en el grupo. Cuando el elemento original se multiplica por su inverso, el resultado debe ser el elemento de identidad. La propiedad asociativa dice que el producto de los elementos del grupo\((X_1 \cdot X_2) \cdot X_3\) donde los dos primeros elementos se multiplican primero y el producto de los elementos del grupo\(X_1 \cdot (X_2 \cdot X_3)\) donde los dos últimos elementos se multiplican primero deben ser iguales.
\[(X_1 \cdot X_2) \cdot X_3 = X_1 \cdot (X_2 \cdot X_3) \nonumber \]
La propiedad de cierre dice que cuando dos elementos del grupo se multiplican juntos, el resultado es otro elemento del grupo. Tabla\(\PageIndex{1}\) resume estas propiedades donde\(X_1\),\(X_2\), y\(X_3\) son elementos del grupo, y\(X_{id}\) es el elemento de identidad que también es un miembro del grupo. Sin embargo, los grupos pueden tener más o menos de tres elementos.
En general, importa el orden en que se multiplican los elementos del grupo.
\[X_1 \cdot X_2 \neq X_2 \cdot X_1. \nonumber \]
A la cantidad\(X_1 \cdot X_2 \cdot X_1^{-1} \cdot X_2^{-1}\) se le llama a veces el conmutador, y se denota\([X_1, X_2]\). Debido a la propiedad de cierre, se garantiza que el resultado del conmutador sea otro elemento del grupo [14, p. 21,32] [164, p. 39,50].
\[[X_1, X_2] = X_1 \cdot X_2 \cdot X_1^{-1} \cdot X_2^{-1} \label{14.3.33} \]
Las simetrías continuas de ecuaciones son descritas por generadores infinitesimales que forman un grupo Lie. Los elementos del grupo son los generadores infinitesimales escalados por una constante [164, p. 52]. La operación de multiplicación grupal es una multiplicación regular también posiblemente escalada por una constante. De acuerdo con esta definición\(U = \partial_t\),,\(U = 2\partial_t\) y\(U = -10.2\partial_t\) son todos el mismo elemento del grupo porque la constante no afecta al elemento. Si encontramos algunos generadores infinitesimales de un grupo, es posible que podamos usar la Ecuación\ ref {14.3.33} para encontrar más generadores. Un conjunto completo de generadores infinitesimales describen todas las simetrías continuas (geométricas regulares) posibles de la ecuación. Todas las operaciones de simetría continua (geométrica regular) de la ecuación pueden describirse como combinaciones lineales de los generadores infinitesimales.