
9.5: Sintonización PID vía Optimización
- Page ID
- 85583

Introducción
Afinar un controlador es un método utilizado para modificar el efecto que un cambio de proceso tendrá en la pieza del equipo que se está controlando. El objetivo de afinar un sistema es construir el proceso más robusto posible. El método elegido para afinar un sistema varía dependiendo del parámetro que se mide, la sensibilidad de los materiales, la escala del proceso y muchas otras variables únicas de cada proceso. En este capítulo se discuten los conceptos básicos de afinar un controlador mediante métodos predictivos. Para obtener más información sobre el uso de un método basado en efectos, consulte la sección Afinación Clásica.
Optimización
Al sintonizar un controlador PID\(K_{c}\), las constantes\(T_i\), y\(T_d\) necesitan ser optimizadas. Esto se puede lograr usando la siguiente ecuación de la sección Afinación Clásica:
\[M V=K_{c}\left(e(t)+\frac{1}{T_{i}} \int_{0}^{t} e(\tau) d \tau+T_{d} \frac{d e(t)}{d t}\right) \label{1} \]
donde
- \(MV\)es la variable manipulada (es decir, posición de la válvula) que cambiará el controlador
- \(K_c\)cuenta de la ganancia del sistema
- \(T_i\)cuenta de error integrado del sistema
- \(T_d\)contabiliza el error derivado del sistema
El ajuste por optimización utiliza programas de modelado por computadora, como Microsoft Excel, para encontrar los valores óptimos para los coeficientes\(K_c\)\(T_i\), y\(T_d\) para producir el error mínimo (la función Solver en Excel se puede usar en esta situación). Para obtener más información sobre el uso de estos parámetros y sus efectos generales en el sistema de control, consulte la sección de control P, I, D, PI, PD y PID.
Modelado Excel
Para obtener instrucciones sobre cómo instalar Solver en Excel, consulte la sección Agregar en la aplicación Solver en Excel 2007. Para obtener instrucciones sobre cómo usar Solver en Excel, consulte la sección Herramienta Solver de Excel. La ecuación\ ref {1} se puede usar en Excel para optimizar los valores de K c, T i y T d. Los siguientes son los pasos para optimizar estas constantes:
- Elija un punto de ajuste. Los ejemplos de puntos de ajuste incluyen la temperatura a la que se espera que permanezca una reacción y el caudal de una corriente de enfriamiento.
- Hacer una columna por error. Cree una función en cada celda para que el error sea igual al punto de ajuste menos el valor real.
- Hacer una columna que calculará la Ecuación 1.
- Al final de la columna de error, utilice la función sum para sumar todos los errores en la columna.
- Haga tres celdas para K c, T i y T d e inserte los valores iniciales.
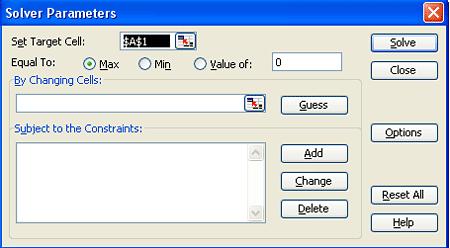
- Abra la función Solver en Excel.
- En Solver, establezca la celda de destino en la celda de errores sumados. Establezca la celda de destino igual al valor mínimo posible. Establezca las celdas cambiantes en K c, T i y T d.
- Haga clic en 'Resolver' para minimizar la suma del error y, por lo tanto, optimizar las constantes K c, T i y T d.
Consejos para usar Excel Solver para optimizar los parámetros del controlador PID:
- Al elegir valores iniciales para sus parámetros, intente comenzar con K c =1, T i =1000 y T d =1. Dado que Solver solo realiza un número limitado de iteraciones (generalmente establecidas en 100), puede establecerse en una respuesta incorrecta.
- Cambie los valores de K c manualmente y optimice con Solver hasta obtener el valor más bajo en la celda de destino. Este es el más eficiente ya que K c suele tener el mayor efecto en un controlador PID.
- Asegúrese de establecer restricciones en sus parámetros en el cuadro 'Sujeto a las restricciones: 'en Solver (por ejemplo, K c > 0).
- Asegúrese de incorporar cualquier limitación física (por ejemplo, la temperatura máxima del calentador) en su modelo Excel. Aunque su sistema puede no estar cerca del límite inicialmente, Solver puede intentar superar ese límite si no está programado en su modelo.
Aplicación Industrial
Los parámetros (K c, T i, T d) encontrados a través de la optimización no necesariamente darán el mejor control. Para afinar de manera óptima un controlador, un técnico debe ajustar el equipo para afinar el proceso. Entonces, ¿por qué es necesario afinar por optimización? Los parámetros encontrados por la optimización dan un punto de partida preciso para el técnico.
Ejemplo de Afinación PID por Optimización
Este ejemplo se basa en el ejemplo de la sección Modelo de intercambio de calor CSTR. El objetivo es optimizar el controlador PID para la temperatura del refrigerante. Siga el ejemplo completamente elaborado en: [Media:Optimal PID.xls Optimal PID]
Como se muestra en el archivo Excel, la temperatura del refrigerante cambia en respuesta a variaciones desde el punto de ajuste por un controlador tipo PID. Cambiar los valores de K c, T i y T d usando Solver, para minimizar el error total, siempre que los valores en el cuadro verde. En la segunda hoja, etiquetada como 'perturbaciones', se puede observar que una vez optimizados, los parámetros deben ajustarse al sistema, independientemente de los cambios en las condiciones de operación.
Es importante tener en cuenta que los valores iniciales que elija para los parámetros PID afectarán en gran medida sus resultados finales al usar un solucionador excel. Por lo que siempre debes usar tu intuición para juzgar si tus valores iniciales son razonables o no. Según ExperTune, los ajustes de inicio de PID para los bucles de control PID comunes son:
- Tipo de bucle: Flujo; P = 50 a 100; I = 0.005 a 0.05; D = ninguno;
- Tipo de Bucle: Presión de Líquido; P = 50 a 100; I = 0.005 a 0.05; D = ninguno
- Tipo de bucle: Presión de gas; P = 1 a 50; I = 0.005 a 0.05; D = 0.02 a 0.1;
- Tipo de Bucle: Nivel de Líquido; P = 1 a 50; I = 1 a 100; D = 0.01 a 0.05;
- Tipo de bucle: Temperatura; P = 2 a 100; I = 0.2 a 50; D = 0.1 a 20;
Los valores anteriores son aproximados, suponen un diseño de bucle de control adecuado, algoritmo ideal o serie y no se aplican a todos los controladores. Esta información solo debe ser utilizada como una posible consideración y no debe tomarse como un valor inicial absoluto para todos los controles PID. Para más información sobre los valores anteriores por favor visite www.expertune.com/tutor.html
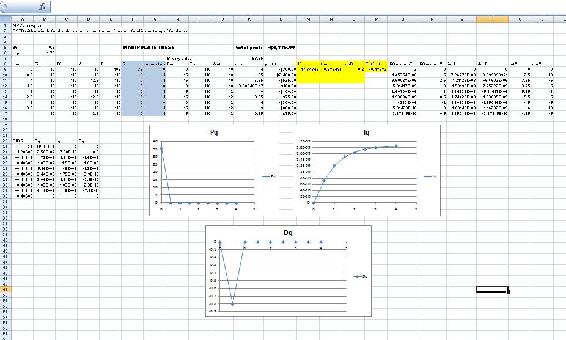
Como se mencionó anteriormente, para optimizar los parámetros en un sistema controlado por PID se puede utilizar la función solver en excel. Sin embargo, la función solver a veces puede encontrarse con sus propios problemas debido al proceso que utiliza para resolver estos valores “óptimos”. Para asegurar que solver te brinde los valores óptimos correctos, se necesita alguna “optimización” manual. Usando su hoja de Excel, el controlador del sistema se puede separar en sus diferentes componentes P, I y D. El comportamiento de cada componente se puede monitorear ya que los parámetros se cambian manualmente. Teóricamente elegiría valores que hagan que cada componente alcance el estado estacionario a lo largo del tiempo. El solucionador excel puede ser utilizado como una herramienta de precisión. Si tus valores ya están más cerca de los valores óptimos, entonces solucionador no debería tener problemas para hacerlos más precisos. Se recomienda que las gráficas de los componentes se verifiquen después de usar solver con sus conjeturas iniciales. Puede que no tengas que pasar por este largo y la mayor parte del tiempo doloroso proceso. Este es un ejemplo de cómo las gráficas P, I y D cambian con diferentes parámetros. Tenga en cuenta que la gráfica PID combinada también alcanzará el estado estacionario si cada uno de los componentes alcanza el estado estacionario.
(Los parámetros no están optimizados)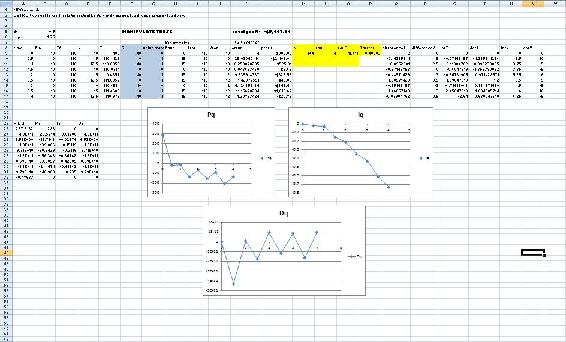
(Parámetros optimizados)
Ejemplo: Optimización de un Intercambiador de Calor
Este ejemplo se basa en el Modelado ODE en Excel del Modelo de Intercambio de Calor.
Encuentra los mejores valores de K c, T i y T d en la hoja de cálculo dada media:PID_HeatExchange.xls.
Tenga en cuenta las tres pestañas diferentes:
- la primera pestaña muestra el problema a resolver
- el segundo es un método paso a paso para crear esta hoja por su cuenta
- el tercero es la respuesta al problema
Después de usar Solver:
- Haga clic en las celdas de una fila para determinar qué parámetros se ven afectados por los cambios de MV
- Cambiar los valores de K c, T i y T d para ver cómo afectarán el perfil de temperatura general. ¿Qué parámetro tiene el mayor efecto? Con base en la ecuación, ¿tiene sentido esto?
Ejercicio\(\PageIndex{1}\)
¿Qué desea minimizar al optimizar las constantes K c, T i y T d?
- Contestar
-
tiempo
Referencias
- Svrcek, William Y., Mahoney, Donald P., Young, Brent R. “Un enfoque en tiempo real para el control de procesos”, 2a Edición. John Wiley & Sons, Ltd.
Colaborador
- Autores: Andrew MacMillan, David Preston, Jessica Wolfe, Sandy Yu
- Administradores: YoonA Choi, Yuan Ma, Larry Mo, Julie Wesely