
9.6: Desventajas y soluciones de PID
- Page ID
- 85584

Introducción
Un controlador proporcional-integral-derivado (PID) es uno de los algoritmos más comunes utilizados para los sistemas de control. Es ampliamente utilizado porque el algoritmo no involucra matemáticas de orden superior, sino que aún contiene muchas variables. La cantidad de variables que se utilizan permite al usuario ajustar fácilmente el sistema a los ajustes deseados. El algoritmo para el PID utiliza un bucle de retroalimentación para corregir la diferencia entre algún valor medido y el punto de ajuste. Esto lo hace calculando y emitiendo alguna acción que corregirá este error en el sistema. Un controlador PID tiene un control proporcional, integral y derivado que maneja el futuro actual, pasado y predicho del error de señal. Para más información sobre PID, por favor refiérase a PID Intro. El controlador PID puede operar sistemas que se ejecutan de manera lineal o no lineal. Los procesos de sintonización se realizan al controlador para abordar el posible sistema no lineal. Las limitaciones surgen dentro del sistema porque la afinación se limita a solo tres parámetros diferentes (controles proporcionales, integrales y derivados). Se puede encontrar información adicional sobre la afinación de PID en [1] o [2]. Las limitaciones más comunes que ocurren dentro del control PID involucran específicamente el control integral. El siguiente artículo aborda algunas de las limitaciones comunes que enfrenta cada tipo de control, con énfasis en el control integral, y algunas soluciones para superar cada una de estas limitaciones.
Control Proporcional
El propósito principal del control proporcional es minimizar las fluctuaciones que ocurren dentro del sistema.
Limitaciones
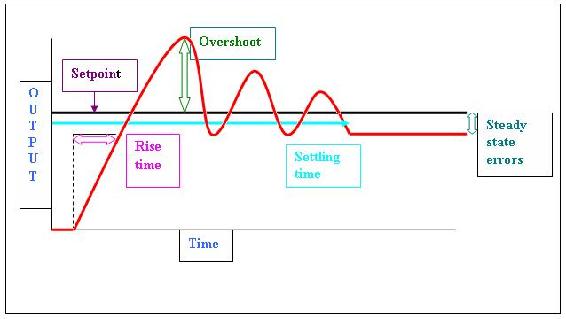
El controlador P suele tener errores de estado estacionario (la diferencia en el punto de ajuste y el resultado real) a menos que la ganancia de control sea grande. A medida que la ganancia de control aumenta, surgen problemas con la estabilidad del bucle de retroalimentación. Por ejemplo, reducir el tiempo de subida implica una ganancia proporcional alta, y reducir el sobreimpulso y las oscilaciones implica una pequeña ganancia proporcional. Esto no es posible lograr en todos los sistemas.
A continuación se muestra un diagrama general de resultados del proceso que muestra la terminología utilizada anteriormente.
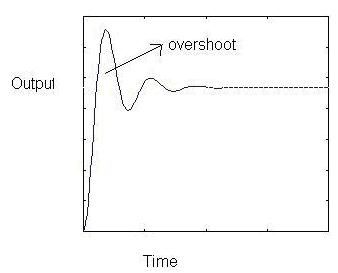
A continuación se muestra un diagrama de muestra de la salida del proceso de control proporcional.
Soluciones
La manera de eliminar estos errores de estado estacionario es mediante la adición de una acción integral. El término integral en la ecuación lleva el error a cero. La constante Integral más alta (1/T t) conduce el error a cero antes, pero también invita a oscilaciones e inestabilidad. Lee en la sección de control integral a continuación para conocer más sobre las limitaciones asociadas a este término integral.
A continuación se muestra un diagrama de salida de proceso de muestra cuando se agrega control integral.
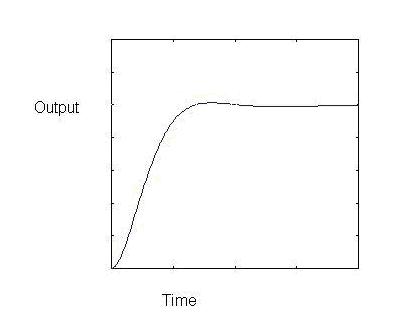
La imagen de arriba muestra la reducción de sobreimpulsos y oscilaciones en comparación con la imagen antes de agregar la acción integral.
Control Integral
La contribución del término integral es proporcional tanto a la magnitud del error como a la duración del error. Sumando el error instantáneo a lo largo del tiempo (integrando el error) da el desplazamiento acumulado que debería haber sido corregido previamente. El error acumulado se multiplica entonces por la ganancia integral y se agrega a la salida del controlador. La magnitud de la contribución del término integral a la acción general de control está determinada por la ganancia integral,\(K_i\).
El término integral viene dado por:
\[D_{\text {out }}=K_{d} \frac{d e}{d t} \nonumber \]
donde
- D out: es la salida Derivada
- K d: es la ganancia derivada, un parámetro de ajuste
- e: es el Error = SP − PV
- t: es el Tiempo o tiempo instantáneo (el presente)
Limitaciones
Windup
Un conocimiento básico del concepto de windup es útil antes de describir un tipo específico. Windup se define como la situación en la que el controlador de retroalimentación supera los límites de saturación (es decir, máximo) del actuador del sistema y no es capaz de responder instantáneamente a los cambios en el error de control. El concepto de la variable de control que alcanza los límites de operación del actuador es razonable considerando la amplia variedad de condiciones de operación que son posibles. Cuando se produce el devanado, el actuador funciona constantemente en su límite de saturación a pesar de cualquier salida que pueda tener el sistema. Esto significa que el sistema ahora se ejecuta con un bucle abierto en lugar de un bucle de retroalimentación constante.
Enrollamiento del integrador
El tipo de devanado más común que ocurre es la windup del integrador. Esto ocurre cuando la entrada en el sistema recibe un comando repentino de paso positivo y causa un error positivo cuando el sistema responde por primera vez al actuador. Si la tasa de integración es mayor que la velocidad real del sistema, la salida del integrador puede exceder el límite de saturación del actuador. El actuador entonces operará en su límite sin importar cuáles sean las salidas del proceso. El error también se seguirá integrando y el integrador crecerá en tamaño o “terminará”. Cuando la salida del sistema finalmente alcanza el valor deseado, el signo del error se invierte (por ejemplo y_ {sp} "src=”/@api /deki/files/18198/image-870.png “>) y hace que el integrador “se relaje” hasta que las cosas vuelvan a la normalidad. A través del viento abajo la señal de control sigue siendo máxima por un largo periodo de tiempo y la respuesta se retrasa. El integrador tarda un largo período de tiempo en recuperarse completamente al rango de operación del actuador. La caída del integrador puede ocurrir por grandes cambios en el punto de ajuste, perturbaciones significativas o mal funcionamiento del equipo.
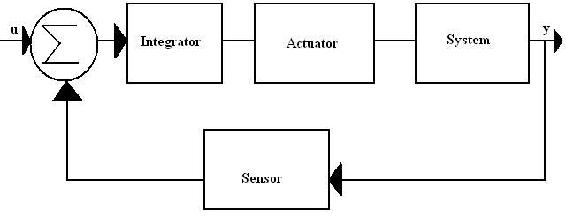
La ilustración es un diagrama de flujo que muestra los pasos específicos que tienen lugar a través del controlador integrador. Muestra la entrada ( ) y salida del sistema (
) y salida del sistema ( ), junto con el integrador, el actuador, el sistema y el sensor involucrados en el proceso. El sigma utilizado en cada diagrama de flujo se utiliza para representar la suma de todas las variables ingresadas a él.
), junto con el integrador, el actuador, el sistema y el sensor involucrados en el proceso. El sigma utilizado en cada diagrama de flujo se utiliza para representar la suma de todas las variables ingresadas a él.
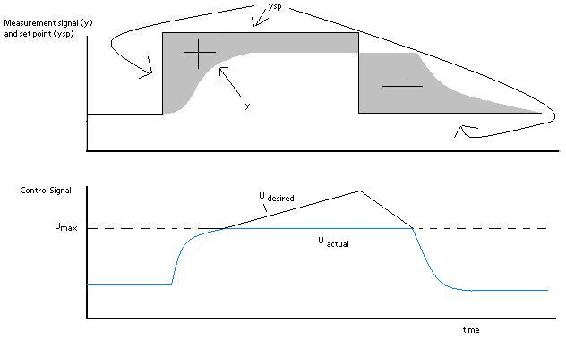
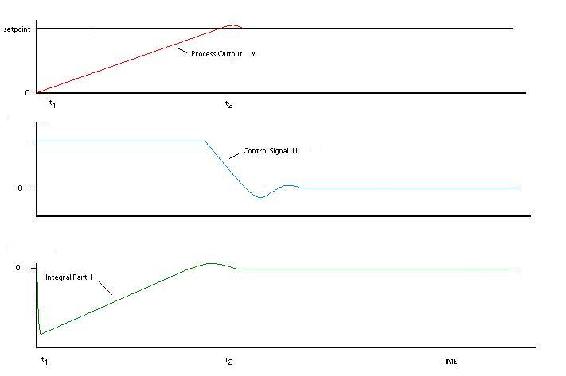
Las gráficas anteriores son ilustraciones de la windup del integrador. El error ( ) se muestra en la gráfica superior como
) se muestra en la gráfica superior como , donde
, donde está el punto de ajuste y es la señal medida. El gráfico inferior muestra la señal de control (). En este caso específico de bobinado del integrador, se produce un cambio de punto de ajuste y la señal de control se satura a su cantidad máxima
está el punto de ajuste y es la señal medida. El gráfico inferior muestra la señal de control (). En este caso específico de bobinado del integrador, se produce un cambio de punto de ajuste y la señal de control se satura a su cantidad máxima . Sin embargo, el error del sistema aún no se elimina porque la señal de control es demasiado pequeña para hacer que el error vaya a cero. A su vez, esto hace que la integral aumente, lo que provoca que aumente la señal de control deseada. Por lo tanto, sigue habiendo una diferencia entre la señal de control deseada y la señal de control verdadera. Después de un periodo de tiempo, el punto de ajuste se baja a un nivel donde el controlador es capaz de eliminar el error de control. En este punto
. Sin embargo, el error del sistema aún no se elimina porque la señal de control es demasiado pequeña para hacer que el error vaya a cero. A su vez, esto hace que la integral aumente, lo que provoca que aumente la señal de control deseada. Por lo tanto, sigue habiendo una diferencia entre la señal de control deseada y la señal de control verdadera. Después de un periodo de tiempo, el punto de ajuste se baja a un nivel donde el controlador es capaz de eliminar el error de control. En este punto y_ {sp} "src=”/@api /deki/files/18198/image-870.png “>, lo que provoca un cambio en el signo del error. Este cambio en el signo hace que la señal de control comience a disminuir. La señal verdadera (
 ) se atasca por un tiempo debido a que la señal de control deseada u está por encima del límite. Los cambios en los puntos de ajuste a lo largo de este ejemplo específico ocurren porque se cambia la entrada para obtener un error mínimo en el sistema.
) se atasca por un tiempo debido a que la señal de control deseada u está por encima del límite. Los cambios en los puntos de ajuste a lo largo de este ejemplo específico ocurren porque se cambia la entrada para obtener un error mínimo en el sistema.
Archivo:Integrador windup output control integral5.JPG
Las imágenes de arriba son otra visualización de la windup del integrador. La parte superior muestra el error, el medio muestra la señal de control y la parte inferior muestra la porción integral. El término integral comienza a disminuir, pero sigue siendo positivo, en cuanto el error se vuelve negativo en . La salida se mantiene saturada debido a la gran termal integral que se desarrolla. La señal de salida permanece en este nivel hasta que el error se vuelve negativo durante un tiempo suficientemente largo (
. La salida se mantiene saturada debido a la gran termal integral que se desarrolla. La señal de salida permanece en este nivel hasta que el error se vuelve negativo durante un tiempo suficientemente largo ( ). La señal de control entonces fluctúa varias veces desde su valor máximo hasta su valor mínimo y finalmente se establece en un valor específico. En cada lugar donde la señal de control alcanza su máximo el valor integral tiene un gran sobreimpulso, y se deduce que cada lugar donde la señal de control alcanza un mínimo la integral tiene una oscilación amortiguada. El término integral explica la eliminación del error en el sistema oscilante, lo que a su vez hace que la salida del sistema llegue finalmente a un punto que está tan cerca del punto de ajuste que el actuador ya no está saturado. En este punto, cada gráfica comienza a comportarse linealmente y se asienta. Este ejemplo se utilizará más adelante para mostrar una solución a la windup integral. En la siguiente sección se enumeran varias ideas sobre cómo prevenir la windup.
). La señal de control entonces fluctúa varias veces desde su valor máximo hasta su valor mínimo y finalmente se establece en un valor específico. En cada lugar donde la señal de control alcanza su máximo el valor integral tiene un gran sobreimpulso, y se deduce que cada lugar donde la señal de control alcanza un mínimo la integral tiene una oscilación amortiguada. El término integral explica la eliminación del error en el sistema oscilante, lo que a su vez hace que la salida del sistema llegue finalmente a un punto que está tan cerca del punto de ajuste que el actuador ya no está saturado. En este punto, cada gráfica comienza a comportarse linealmente y se asienta. Este ejemplo se utilizará más adelante para mostrar una solución a la windup integral. En la siguiente sección se enumeran varias ideas sobre cómo prevenir la windup.
Soluciones
Las soluciones involucradas en la windup integral se denominan esquemas anti-enrollamiento. Anti-windup es un método para contrarrestar la windup que ocurre en la integración que ocurre en el controlador integral del PID.
Back-Cálculo y Seguimiento
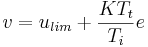
Cuando la salida está saturada, el término integral en el controlador se vuelve a calcular para que también esté en el límite de saturación. El integrador cambia con el tiempo con la constante . Se encuentra la diferencia entre el controlador de salida (
. Se encuentra la diferencia entre el controlador de salida ( ) y la salida del actuador (), y esto se define como una señal de error. Esta señal de error se retroalimenta a la entrada del integrador con una ganancia de
) y la salida del actuador (), y esto se define como una señal de error. Esta señal de error se retroalimenta a la entrada del integrador con una ganancia de . La salida del controlador es proportinal a la cantidad de tiempo que el error está presente. La señal de error solo está presente cuando el actuador está saturado, por lo tanto no tendrá ningún efecto sobre el funcionamiento normal. Con este método, se rompe la ruta de retroalimentación normal alrededor del proceso y se forma una nueva ruta de retroalimentación alrededor del integrador. La entrada del integrador se convierte en:
. La salida del controlador es proportinal a la cantidad de tiempo que el error está presente. La señal de error solo está presente cuando el actuador está saturado, por lo tanto no tendrá ningún efecto sobre el funcionamiento normal. Con este método, se rompe la ruta de retroalimentación normal alrededor del proceso y se forma una nueva ruta de retroalimentación alrededor del integrador. La entrada del integrador se convierte en:
\[\\frac {1}{T_t}e_s + \frac {K} {T_i}e \nonumber \]
Sabiendo eso , se puede hacer la siguiente ecuación:
, se puede hacer la siguiente ecuación:
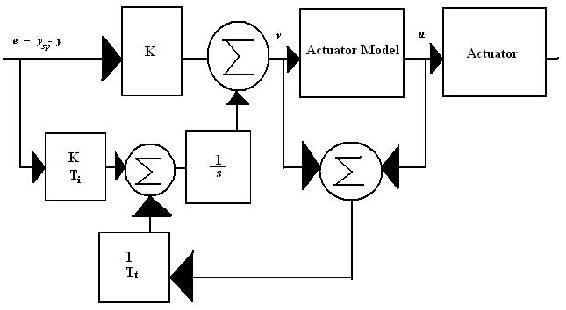
 es la variable de control cuando está saturada. Los signos para y son siempre los mismos; por lo tanto, siempre es más grande que. Esto a su vez evita la windup en el integrador. La ganancia de retroalimentación es y es la velocidad a la que se restablece la salida del controlador. se llama constante de tiempo de seguimiento y se utiliza para ajustar la cantidad de anti-enrollamiento. El diagrama de flujo que se muestra a continuación muestra un controlador PID con anti-windup implementado. La señal de error en este proceso solo es distinta de cero cuando el actuador está saturado. Cuando esto ocurre, la ruta de retroalimentación normal alrededor del proceso se rompe porque la entrada del proceso permanece constante. Luego se forma una nueva trayectoria de realimentación alrededor del integrador y hace que la salida del integrador se dirija hacia un valor tal que la entrada del integrador se vuelve cero. El cálculo posterior nunca permite que la entrada al actuador alcance su nivel de saturación real porque pronostica lo que realmente entrará en el modelo de actuador de antemano.
es la variable de control cuando está saturada. Los signos para y son siempre los mismos; por lo tanto, siempre es más grande que. Esto a su vez evita la windup en el integrador. La ganancia de retroalimentación es y es la velocidad a la que se restablece la salida del controlador. se llama constante de tiempo de seguimiento y se utiliza para ajustar la cantidad de anti-enrollamiento. El diagrama de flujo que se muestra a continuación muestra un controlador PID con anti-windup implementado. La señal de error en este proceso solo es distinta de cero cuando el actuador está saturado. Cuando esto ocurre, la ruta de retroalimentación normal alrededor del proceso se rompe porque la entrada del proceso permanece constante. Luego se forma una nueva trayectoria de realimentación alrededor del integrador y hace que la salida del integrador se dirija hacia un valor tal que la entrada del integrador se vuelve cero. El cálculo posterior nunca permite que la entrada al actuador alcance su nivel de saturación real porque pronostica lo que realmente entrará en el modelo de actuador de antemano.
Las siguientes gráficas describen lo que sucede con el mismo sistema (segundo ejemplo) descrito en la sección Introducción a Integrator Windup, solo el controlador ahora tiene anti-windup. La salida del integrador está en un valor que provoca que el controlador esté en el límite de saturación, sin embargo, la integral es inicialmente negativa cuando el actuador está saturado (), lo que contrasta con el comportamiento original del integrador. Esto tiene un efecto positivo en la salida del proceso, ya que converge al punto de ajuste mucho más rápido que el controlador PI normal. Solo hay un ligero sobreimpulso en la salida del proceso ().
Integración Condicional
La integración condicional opera de manera similar al cálculo posterior. En este método la integración se apaga cuando el control está lejos del estado estacionario. Entonces, la acción integral solo se usa cuando se cumplen ciertas condiciones, de lo contrario el término integral se mantiene constante. Hay dos condiciones posibles que pueden hacer que la integral se establezca como un valor constante. Primero, si la salida del controlador está saturada (la integración se apaga si el error es positivo pero no negativo), entonces la entrada del integrador se establece en un valor constante. Un segundo enfoque implica hacer que el integrador sea constante cuando hay un gran error. Hay una desventaja en el segundo enfoque porque el controlador puede quedar atascado en un error de control distinto de cero si el término integral tiene un valor grande en el momento del apagado. Por esta razón, el primer enfoque mira la salida saturada del controlador, no la salida saturada del actuador porque hacer referencia a la salida del actuador generará la misma desventaja [1].
Hay muy poca diferencia en cuanto al rendimiento entre la integración y el seguimiento, pero mueven las bandas proporcionales de manera diferente. Sigue leyendo para conocer las bandas proporcionales.
Para demostrar lo que significa apagar el término integral, aquí está la ecuación (con lógica) que representa un control con integración condicional.
\[u(t)=K\left(e(t)+\frac{1}{T_{i}} \int e(t) d t\right)+u\left(t_{0}\right) \nonumber \]
Si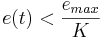 , entonces
, entonces
Else
Implementación de la serie
Para evitar el enrollamiento en un controlador que interactúa, se puede incorporar al sistema un modelo de saturación. El modelo de saturación limitará la señal de control indirectamente. Una limitación demasiado dura provocará una limitación innecesaria de la acción de control. Una limitación demasiado débil provocará un enrollamiento. Se proporciona más flexibilidad si la saturación se posiciona de la siguiente manera:
Con esta configuración es posible forzar a la parte integral a asumir otros valores de precarga durante la saturación. La función de saturación es reemplazada por la no linealidad mostrada. Este procedimiento anti enrollamiento a veces se llama “unidad por lotes” y se considera un tipo de integración condicional. Se utiliza principalmente para ajustar el sobreimpulso durante el arranque cuando hay un gran cambio de punto de ajuste.
La Banda Proporcional
La banda proporcional es útil para entender cuando se trata de esquemas windup y anti windup. La banda proporcional es un rango tal que si el valor instantáneo de la salida del proceso o valor predicho en el intervalo cae dentro del rango, el actuador no se satura. La banda proporcional (definida como el área entre y bajo, y alto) viene dada por las siguientes ecuaciones:
Señal de control para control PID sin limitación de ganancia derivada:
\[\\ u = K*(b*y_{sp}) + I - K * T_d * \frac {dy}{dt} \nonumber \]
La salida prevista del proceso viene dada por
\[\\ y_p = y + T_d * \frac {dy}{dt} \nonumber \]
Combinando las ecuaciones anteriores para una señal de control máxima y mínima (y ) que corresponde a los puntos para los que se satura el actuador,
) que corresponde a los puntos para los que se satura el actuador,
\[\\ y_{low} = b * y_{sp} + \frac {I - u_{max}}{K} \nonumber \]
\[\\ y_{high} = b * y_{sp} + \frac {I - u_{min}}{K} \nonumber \]
Si la salida prevista está en la banda proporcional, el controlador opera linealmente. La señal de control se satura cuando la salida prevista está fuera de la banda proporcional. La siguiente gráfica ilustra cómo la banda proporcional es útil para comprender la devanada para el mismo ejemplo. Al tiempo es igual a cero, la banda proporcional se incrementa, indicando que la parte integral está aumentando. Inmediatamente después, la salida es mayor que el punto de ajuste, lo que hace que la parte integral comience a disminuir. Como puede verse, el valor de salida, no alcanza la banda proporcional hasta que es mayor que el punto de ajuste,. Cuando la salida finalmente alcanza la banda proporcional en, pasa por la banda muy rápidamente, debido a que la banda cambia a una velocidad alta. La señal de control disminuye inmediatamente y se satura en sentido contrario, haciendo que la salida disminuya y se acerque al punto de ajuste. Este proceso se repite a medida que el valor de salida converge con el punto de ajuste.
La constante de tiempo de seguimiento tiene una influencia importante en la banda proporcional. La banda proporcional se acerca a la salida debido al seguimiento. La constante de tiempo de seguimiento determina la velocidad a la que se mueve la banda proporcional.
Escenario de vida real
Imagine una situación en la que se necesita un tanque de almacenamiento de agua que se necesita para almacenar agua y abastecer para su uso en una planta y es necesario mantener constante el nivel del agua. Se instala un sensor de nivel para realizar un seguimiento del nivel del agua en el tanque, y envía estos datos al controlador. El controlador tiene un punto de ajuste por ejemplo 75% completo. La tasa de agua que ingresa al tanque se incrementa al abrir la válvula y disminuye al cerrar la válvula. En el caso de enrollamiento integral, la válvula está completamente cerrada o abierta y el actuador envía la señal para cerrarla más o abrirla más lo cual no es posible.
Control de Derivados
Se puede pensar en la acción derivada como hacer cambios cada vez más pequeños a medida que uno se acerca al valor correcto, y luego detenerse en la región correcta, en lugar de hacer más cambios. El control derivado cuantifica la necesidad de aplicar más cambio vinculando la cantidad de cambio aplicada a la tasa de cambio necesaria. Por ejemplo, se aplicaría más un acelerador a medida que la velocidad del automóvil sigue bajando. Sin embargo, la caída de velocidad real es independiente de este proceso. Por sí solo, el control derivado no es suficiente para restaurar la velocidad a un valor específico. Emparejar la coincidencia en cambio con una constante de proporcionalidad es suficiente para controlar adecuadamente la velocidad.
El control derivado generalmente se usa junto con los controles P y/o I porque generalmente no es efectivo por sí mismo. El control derivado por sí solo no sabe dónde se encuentra el punto de ajuste y solo se usa para aumentar la precisión dentro del sistema. Este es solo tipo de control que es control de bucle abierto (también conocido como bucle de alimentación directa). El control derivado opera con la finalidad de determinar qué sucederá con el proceso en el futuro examinando la tasa de cambio de error dentro del sistema. Cuando se implementa el control derivado se utiliza la siguiente ecuación general:
\[u(t)=\frac{1}{T_{d}} \frac{d}{d t} e(t)+u\left(t_{0}\right) \nonumber \]
donde
 = señal de control
= señal de control = tiempo derivado
= tiempo derivado = error
= error = señal de control inicial
= señal de control inicial
Esta ecuación muestra que el control derivado es proporcional al cambio de error dentro del sistema.
Limitaciones del Control Derivado
El principal problema asociado con este control es el problema del ruido. Cuando la frecuencia dentro del sistema es alta (el cambio en el error del sistema es grande), tomar la derivada de esta señal puede amplificar la señal en gran medida. Por lo tanto, pequeñas cantidades de ruido dentro del sistema provocarán entonces que la salida del sistema cambie en gran cantidad. En estas circunstancias, a menudo es sensato usar un controlador PI o establecer la acción derivada de un controlador PID en cero.
La siguiente es una representación gráfica de alguna función de señal de salida sinusoidal de un sistema.
Soluciones
Para eliminar/minimizar este problema, se puede incluir un filtro de señal electrónica en el bucle. Los filtros de señal electrónica son circuitos electrónicos que realizan funciones de procesamiento de señal, específicamente destinados a eliminar componentes de señal no deseados y/o mejorar los deseados. Los filtros electrónicos pueden ser: pasivos o activos, analógicos o digitales, discreto-tiempo (muestreados) o de tiempo continuo, lineales o no lineales, etc. Los tipos más comunes de filtros electrónicos son los filtros lineales, independientemente de otros aspectos de su diseño.
Para más información sobre los filtros de señal electrónica, consulte el siguiente sitio web:
es.wikipedia.org/wiki/Filtro_Electronico
El término derivado en la ecuación suele cambiarse poniendo un filtro de primer orden en el término para que la derivada no amplifique el ruido de alta frecuencia que se atenúa. A continuación se muestra una figura de resultado de muestra de una posible derivada de la señal de salida mostrada anteriormente junto con la señal filtrada.
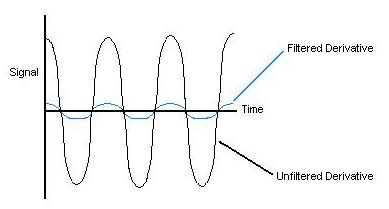
Como se muestra, es posible que la amplitud se incremente cuando se toma la derivada para una función sinusoidal. Un filtro suele ser un conjunto de ecuaciones complicadas que se agregan a la derivada que afectan a la función como se muestra.
Robustez de controladores PID
Al diseñar un controlador PID es importante no solo crear un controlador que corrija el error en una señorería eficiente, sino también un controlador robusto. No importa lo bueno que sea el controlador si no puede manejar la magnitud de ciertas perturbaciones entonces no podrá desempeñarse bien y completar el trabajo. La robustez de un controlador es la capacidad del controlador para soportar perturbaciones y seguir funcionando de manera efectiva. Para calcular la robustez del controlador, se calcula una suma ponderada de la integral del esfuerzo del controlador cuadrado (ISC) y la integral del error de controlador cuadrado (ISE). Cuanto menor sea la suma ponderada, más robusto será el controlador.
ISE = 0 ∫ ∞ e (t) 2 dt
ISC = 0 ∫ ∞ [u (∞) -u (t)] 2 dt
IT = w ISC + ISE
En estas ecuaciones u es la variable de entrada, w es el factor de peso que se basa en procesos descendentes y TI es el error total y el esfuerzo del controlador. El factor peso se utiliza para asignar una mayor significancia al ISC o al ISE. La importancia depende del diseño y de si es más importante tener un error mínimo y un control estricto o menos esfuerzo del controlador con más error. Se utilizan valores bajos de w cuando se desea un control estricto. Los cálculos de robustez se determinan experimentalmente. La robustez depende mucho del tipo de control utilizado, ya sea retroalimentación, avance, cascada o una combinación.
Notas sobre robustez
Es importante darse cuenta de que al calcular la robustez de un sistema de avance, el sistema alcanzará un estado estacionario, pero es poco probable que el sistema alcance el punto de ajuste original. Como resultado, lo más probable es que el sistema de avance sea menos robusto que un sistema de retroalimentación. La razón por la que el sistema de alimentación directa no regresa al punto de ajuste sino que encuentra un nuevo estado estacionario es porque usa control de bucle abierto y no hay sensores que le informen que su ajuste a la perturbación no funcionó correctamente. Por esta razón, los controladores de alimentación directa a veces se acoplan con un sistema de retroalimentación. Cuando se combina, el controlador de avance ahora puede ver si sus correcciones lograron el resultado deseado o no, lo que resulta en un controlador más robusto.
Ejemplo de cálculo de robustez
En este sistema, el controlador está regulando la temperatura de la alimentación a un cierto proceso aguas abajo. Después de recolectar datos experimentales de su controlador, se realizó la siguiente gráfica.
Usando esta gráfica también se puede graficar el esfuerzo del controlador cuadrado y el error cuadrado y se pueden calcular el ISE y el ISC. La gráfica del esfuerzo y error correspondiente se puede ver a continuación.
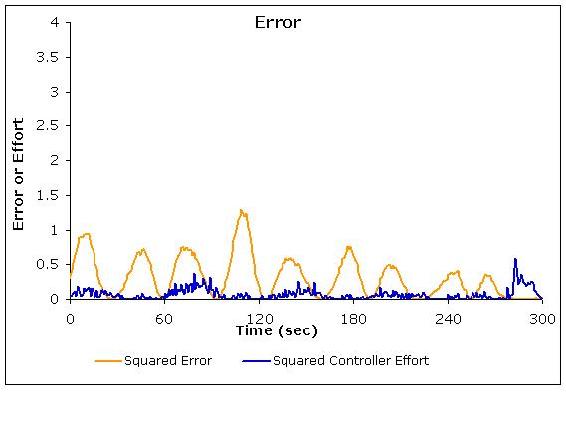
Usando el esfuerzo del controlador cuadrado y el gráfico de error cuadrado, se puede calcular la robustez. Para encontrar la integral del error cuadrado y el esfuerzo del controlador cuadrado se puede utilizar la regla trapezoidal.
\[IT = w ISC + ISE \nonumber \]
\[ISC= 21 ISE =94 \nonumber \]
Suponiendo un factor de peso de 1, la robustez del controlador es 115.
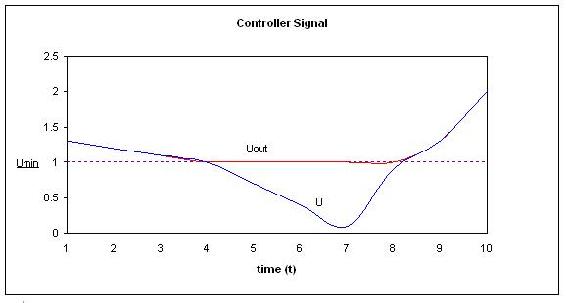
Considere la salida a continuación del uso de uno de los controladores. La ecuación general de la señal de salida, U = K (e). ¿Qué problemas ves en la imagen de abajo y cómo puedes corregirlos?
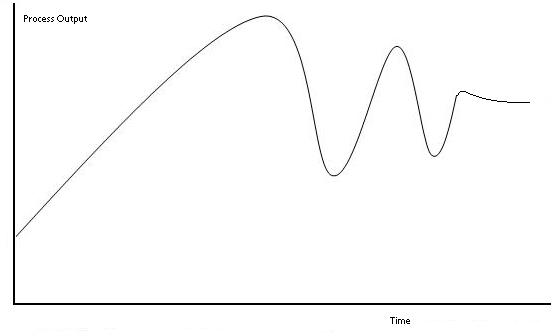
Solución
El tiempo de respuesta es muy alto, y tiene un alto sobreimpulso y problemas de oscilación así como errores de estado estacionario. La ecuación confirma que es un controlador P y
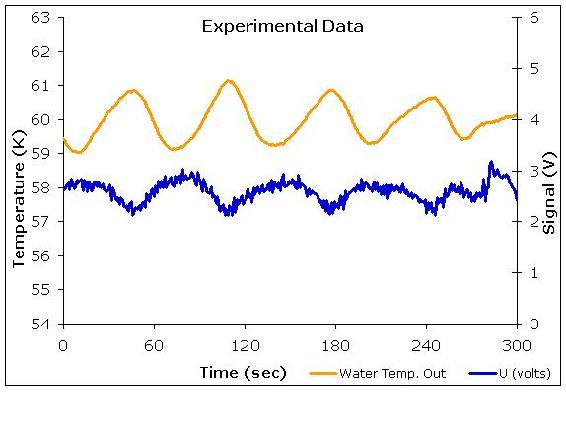
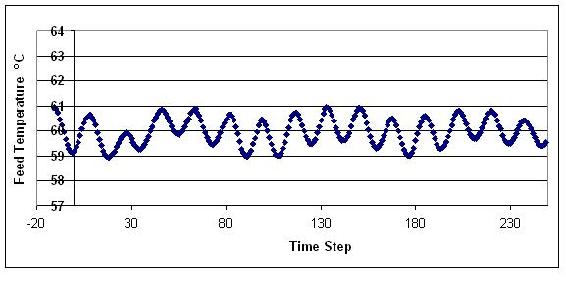
Un intercambiador de calor utiliza un sistema de control PID para controlar la temperatura de la salida del lado del tubo del intercambiador de calor. Se requiere mantener el agua a 20 C para el enfriamiento de un efluente de una reacción exotérmica. El controlador específico tiene una salida mínima de 1 voltio y una salida máxima de 6 voltios. Los datos experimentales muestran un gran tiempo de retraso en la capacidad del controlador para enfriar el fluido entrante (la parte inferior de la curva sinusoidal). Los siguientes datos muestran la correlación entre la salida del controlador y la señal calculada. Describir el tipo de problema y una posible solución al problema.
Solución
El Problema mostrado es un ejemplo de integrador-windup. La señal calculada de los controladores es menor que la salida mínima que puede manejar. Esto explica el tiempo de retraso visto para la porción inferior de la curva sinusoidal. Para solucionar este problema, el control integral se puede volver a calcular utilizando el cálculo de la vía posterior.
(a) Está utilizando un controlador PID para mantener la alimentación a un reactor a una temperatura constante. Es imperativo que la alimentación permanezca dentro de 1 °C del punto de ajuste. Ha ajustado su sistema de control PID de acuerdo con el sistema de bucle abierto Ziegler-Nichols y obtenido los siguientes valores para Kc, τI y τD: Kc = 0.218, 1/τI = 0.0536, τD = 4.67
Quieres saber si estos son buenos valores de control o si se pueden mejorar. Su salida de variable de control se ve así:
Adicionalmente, tiene disponible la siguiente gráfica de la salida de voltaje de sus parámetros de control:
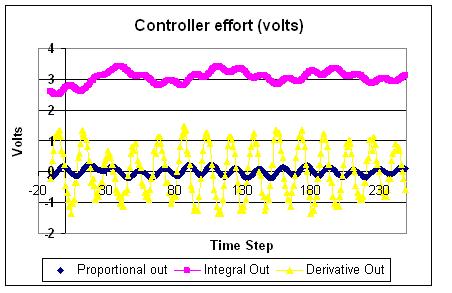
¿Este sistema está en control? Si es así, explique por qué. De no ser así, explique por qué y qué mejoras (cualitativas) a las ganancias del PID llevarán al sistema a un mejor control.
Solución
El sistema tiene el control ya que parece mantenerse aproximadamente dentro de los límites aceptables definidos de ±1°C, sin embargo, muestra oscilación, lo que indica que el sistema está trabajando un poco más duro de lo que tal vez tiene que hacerlo. Al observar la salida de voltaje del controlador, vemos que la ganancia derivada está dando altas oscilaciones. Por lo tanto, tal vez disminuir esta ganancia mantendría el sistema en control con un poco menos de desgaste en las válvulas de control.
(b) A otro caudal, observas el siguiente comportamiento en tu controlador:
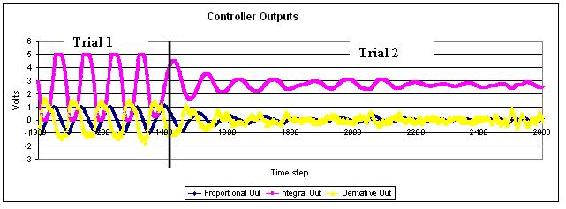
¿El sistema está bajo control en el Juicio 1? ¿En Juicio 2? ¿Por qué o por qué no? ¿Qué pasó físicamente entre ensayos para dar el cambio observado en la producción?
Solución: En la prueba 1, sin siquiera mirar la salida directa del sistema, podemos adivinar que probablemente no tenga el control. El voltaje de salida del controlador indica que la ganancia integral es demasiado alta, y sus oscilaciones salvajes sin duda estarán causando oscilaciones en el sistema. Físicamente, esto significa que el sistema está abriendo y cerrando la válvula constantemente, creando mucho desgaste en la maquinaria, y probablemente sobrecompensando pequeños cambios y desestabilizando aún más el sistema. En el ensayo 2, podemos ver que las oscilaciones de voltaje integral se han amortiguado, lo que indica que la ganancia se ha reducido. A medida que estas oscilaciones se nivelan, las oscilaciones en las otras ganancias de control también se amortiguan, ya que el sistema entra en un mejor control y ninguno de los términos está trabajando tan duro como lo habían estado antes.
Tenga en cuenta que este es un problema abierto destinado a dar a los lectores una intuición sobre los controladores PID
Imagine el problema clásico de la ecuación diferencial de dos tanques en una serie regida por las ecuaciones diferenciales:
\[\frac{d h_{1}}{d t}=P I D-K_{1} \sqrt{h_{1}} \nonumber \]
\[\frac{d h_{2}}{d t}=K_{1} \sqrt{h_{1}}-K_{2} \sqrt{h_{2}} \nonumber \]
\ [\ P I D=1+K_ {p} e (t) +\ frac {1} {t_ {i}}\ int_ {0} ^ {t} e (\ tau) d\ tau+t_ {d}\ frac {d e (t)} {d t}]
donde
- h 1 = altura del tanque 1
- h 2 = altura del tanque 2
- K i = constante de válvula asociada al tanque 1 o 2
Las constantes de válvula K 1 = 5 y K 2 = 5 y el punto de ajuste es 3. ¿Qué valores de K p, t i y t d harán que los dos tanques alcancen el estado estacionario más rápido? También ¿qué valores darán la mayor cantidad de oscilaciones?
Solución
Haga clic en este enlace para obtener la solución de Mathematica elaborada
Otras preguntas que se pueden explorar con ligeras modificaciones del código son:
1. ¿Los valores de K p, t i y t d producirán resultados similares si el controlador PID se colocó en el tanque 2? ¿Qué nuevos valores de K p, t i y t d harán que los dos tanques alcancen el estado estacionario más rápido?
2. Para los valores de K p, t i, y t d que provoca que los dos tanques o alcancen el estado estacionario más rápido, ¿qué pasa si aumentas K 1? ¿Qué pasará si aumentas K 2?
Etiquete las siguientes tablas de respuesta general como sobreamortiguadas, amortiguadas críticamente, amortiguadas, no amortiguadas e inestables.
(a)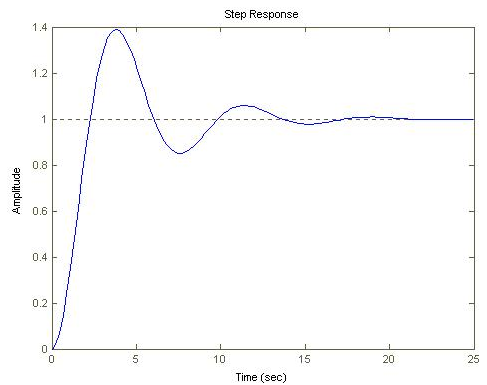
b)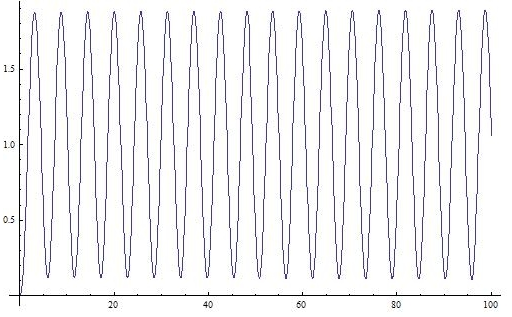
c)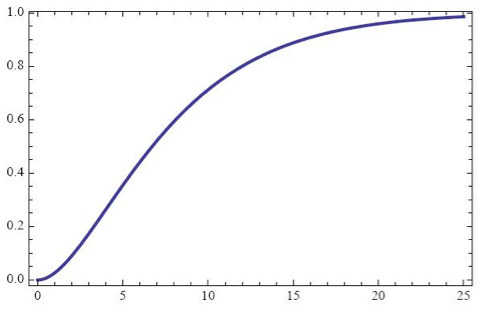
d)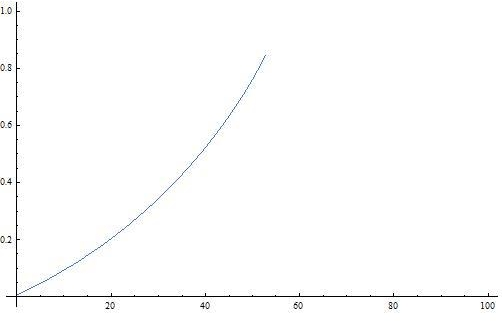
(e)
RESPUESTAS
a) Subamortiguado b) Sin amortiguar c) Amortiguado críticamente d) Inestable e) Sobreamortiguado
Ejercicio\(\PageIndex{1}\)
¿Para qué se utiliza un cálculo posterior?
- Para reducir los problemas de ruido
- Para reducir los errores de estado estacionario
- Para reducir errores en término integral
- Reducir errores en términos proporcionales
Ejercicio\(\PageIndex{1}\)
¿Qué es una banda proporcional?
- Una forma de eliminar errores en términos integrales
- Una forma de eliminar errores en términos proporcionales
- Una forma de eliminar errores en términos derivados
- Una manera de entender el problema anti-enrollamiento
Referencias
- Bhattacharyya, Shankar P., Datta & Silva, Controladores PID para sistemas de retardo de tiempo, 2005 [1]
- Astrom, Karl J., Hagglund, Tore., Control PID Avanzado, ISA, La Sociedad de Instrumentación, Sistemas y Automatización.
- U de Texas ChE
- Artículo de Wikipedia, Controlador PID, es.wikipedia.org/wiki/PID_Control
Colaboradores
- Autores: Ashwini Miryala, Kyle Scarlett, Zachary Zell, Brandon Kountz
- Mayordomos: Brian Hickner, Lennard Gan, Addison Heather, Monique Hutcherson