1.5: Modelos de Procesos Industriales
- Page ID
- 84866

Modelos de Procesos Industriales
Los procesos industriales comprenden el intercambio de energía química, eléctrica o mecánica en la fabricación de productos industriales. Un modelo de proceso industrial en su forma simplificada está representado por un retraso de primer orden con un tiempo muerto que representa el tiempo de retardo entre la aplicación de entrada y la aparición de la salida del proceso.
\(\tau\)Representar la constante de tiempo asociada a un proceso industrial,\(\tau _ d\) representar el tiempo muerto y\(K\) representar la ganancia dc del proceso; entonces, la dinámica simplificada del proceso industrial se representa mediante la siguiente ecuación diferencial de retardo:
\[\tau \frac{ dy(t)}{ dt} +y(t)=Ku(t-t_{d} ) \]
La aplicación de la transformada de Laplace produce el siguiente modelo de primer orden más tiempo muerto (FOPDT) de un proceso industrial:
\[G(s)=\frac{Ke^{-\tau _ d s} }{\tau s+1} \]
donde los parámetros del proceso\(\{ K,\; \tau ,\; \tau _ d \}\), pueden ser identificados a partir de la respuesta del proceso a las entradas. Se obtiene un modelo de proceso racional utilizando una aproximación de la serie Taylor del término de retardo,\(e^{-\tau _ d s}\). Tales aproximaciones típicas incluyen:
\[ e^{-\tau_d s} \simeq 1-\tau _ d s, \ \ \ e^{-\tau _ d s} = \frac{1}{e^{\tau _d s} } \simeq \frac{1}{1+\tau _d s}, \ \ \ e^{-\tau _ds}=\frac{e^{-\tau _ds/2}}{e^{\tau _ds/2}}\simeq \frac{1-\tau _ds/2}{1+\tau_ds/2} \]
La última expresión se califica como aproximación de Pade de primer orden y a menudo se prefiere. También se pueden utilizar aproximaciones de orden superior.
Ejemplo\(\PageIndex{1}\)
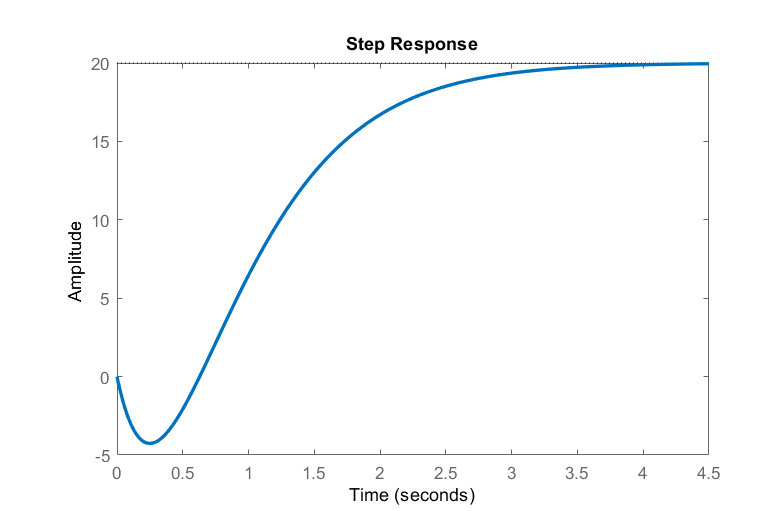
Los parámetros del proceso de un biorreactor de tanque agitado se dan como:\(\{ K,\; \tau ,\; \tau _ d \} =\left\{20,0.5,1\right\}\). El modelo de función de transferencia del proceso se forma como:\(G(s)=\frac{20e^{-s} }{0.5s+1}\).
Mediante el uso de una aproximación de Pade de primer orden, se obtiene un modelo de función de transferencia racional del proceso industrial con retardo como:\(G(s)=\frac{20\left(1-0.5s\right)}{\left(0.5s+1\right)^{2} }\).
La respuesta escalonada de la función de transferencia del biorreactor con aproximación de Pade' muestra un subimpulso debido a la presencia de cero de medio plano derecho (RHP) en la función de transferencia.