
4.4: Rechazo de disturbios
- Page ID
- 84821

Respuesta del sistema a entradas de perturbación
Las perturbaciones son señales no deseadas que entran en un sistema de control de retroalimentación. Una perturbación puede actuar a la entrada o salida de la planta. Aquí consideramos el efecto de la perturbación de entrada.
Para caracterizar el efecto de una entrada de perturbación en el sistema de control de retroalimentación, consideramos el diagrama de bloques modificado (Figura 4.4.1) que incluye una entrada de perturbación.
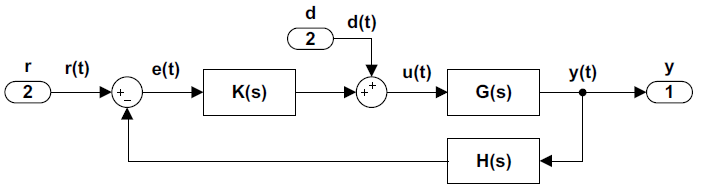
Let\(r(t)\) denotar una referencia, y\(d(t)\) una entrada de perturbación; entonces la salida del sistema se expresa en el dominio de Laplace como:
\[y(s)=\frac{KG(s)}{1+KGH(s)} r(s)+\frac{G(s)}{1+KGH(s)} d(s)\]
Suponiendo que la configuración de retroalimentación de ganancia de unidad\((H(s)=1)\), el error de seguimiento\(e\left(s\right),\) se calcula como:
\[e(s)=\frac{1}{1+KG(s)} r(s)-\frac{G(s)}{1+KG(s)} d(s)\]
Al usar el FVT, el error de estado estacionario se expresa como:
\[e(\infty )=\frac{1}{1+K_{p} } r(\infty )-\frac{G(0)}{1+K_{p} } d(\infty )\]
donde\(K_p\) es la constante de error de posición.
Una ganancia de bucle grande (grande\(K_p\)) reduce el error de estado estacionario en presencia de entradas tanto de referencia como de perturbación. Una ganancia de controlador grande,\(K\), se puede utilizar para aumentar\(K_p\), sin embargo, una gran\(K\) generaría una señal de entrada de gran magnitud a la planta, lo que puede provocar saturación en los dispositivos actuadores (amplificadores, actuadores mecánicos, etc.).
Seguimiento simultáneo y rechazo de perturbaciones
Para analizar los requisitos de control para el seguimiento simultáneo y el rechazo de perturbaciones, consideramos un sistema de control de retroalimentación de ganancia unitaria (\(H(s)=1\)).
Let\(G\left(s\right)=\frac{n\left(s\right)}{d\left(s\right)}\) representar la planta y\(K\left(s\right)=\frac{n_C\left(s\right)}{d_C\left(s\right)}\) representar el controlador; entonces, la salida en presencia de entradas de referencia y perturbación se da como:
\[y\left(s\right)=\frac{d\left(s\right)d_c\left(s\right)}{n\left(s\right)n_c\left(s\right)+d\left(s\right)d_c\left(s\right)}r\left(s\right)-\frac{n\left(s\right)d_c\left(s\right)}{n\left(s\right)n_c\left(s\right)+d\left(s\right)d_c\left(s\right)}d\left(s\right)\]
El polinomio característico se da como:\(\Delta(s)=n(s)n_c(s)+d(s)d_c(s)\).
Los requisitos para el seguimiento asintótico y el rechazo de perturbaciones se establecen de la siguiente manera:
Seguimiento asintótico. Para el seguimiento asintótico,\(d\left(s\right)d_c\left(s\right)\) debe contener cualquier polo inestable de\(r\left(s\right)\). Por ejemplo, un integrador en el bucle de retroalimentación asegura un error de estado estacionario cero a una entrada de referencia constante.
Rechazo de disturbios. Para el rechazo de perturbaciones,\(n\left(s\right)d_c\left(s\right)\) debe contener cualquier polo inestable de\(d\left(s\right)\). Por ejemplo, un filtro de muesca centrado en\(60\ Hz\) elimina el ruido de la línea eléctrica de la señal medida.
Ejemplo\(\PageIndex{1}\)
Un pequeño motor de CC tiene los siguientes valores de componentes:\(R=1\; \Omega ,\; L=10\; \rm mH,\; J=0.01\; {\rm k}g\rm m^{2} ,\; b=0.1\; \frac{\rm Ns}{\rm rad} ,k_{t} =k_{b} =0.05.\)
La función de transferencia del motor de CC se da como:\(G(s)=\frac{500}{s^{2} +110s+1025} \nonumber\).
Ya que\(G\left(0\right)\cong 0.5,\) con un controlador estático, la constante de error de posición es:\(K_p=0.5K\). El error de estado estacionario en presencia de entradas de referencia y perturbación se da como:
\[e(\infty )=\frac{1}{1+0.5K} r(\infty )-\frac{0.5}{1+0.5K} d(\infty ). \nonumber\]
Podemos elegir un grande\(K\) para reducir el error de seguimiento en estado estacionario así como mejorar el rechazo de perturbaciones. Un gran valor de K, sin embargo, reduce la amortiguación del sistema y da como resultado una respuesta oscilatoria del motor de CC.
Para un controlador estático, el polinomio característico de bucle cerrado se da como:\(\Delta (s,K)=s^{2} +110s+1025+500K.\) La relación de amortiguación resultante es:\(\zeta =\frac{55}{\sqrt{1025+500K} }\).
Para limitar la amortiguación a, digamos\(\zeta \le 0.6\), la ganancia del controlador se limita a:\(K\le 14.75\). Podemos elegir, por ejemplo\(K=14\), lo que da como resultado el siguiente error de estado estacionario a las entradas de referencia y perturbación:\(e(\infty )=\frac{1}{8} r(\infty )-\frac{1}{16} d(\infty ).\)