4.5: Sensibilidad y Robustez
- Page ID
- 84837

Sensibilidad y Robustez
La robustez se refiere a la capacidad de un sistema de control para soportar variaciones de parámetros en la función de transferencia de la planta, y aún así mantener los objetivos de estabilidad y rendimiento.
La robustez se caracteriza en términos de la sensibilidad de la función de transferencia de bucle cerrado\(T(s)\) a la variación en uno o más de los parámetros de la planta.
Función de sensibilidad del sistema
La función de sensibilidad del sistema se define como la relación de cambio porcentual en la función de transferencia de bucle cerrado con respecto al cambio porcentual en la función de transferencia de planta, es decir, suponiendo retroalimentación unitaria (\(H(s)=1\)),
\[S_{G}^{T} =\frac{\partial T/T}{\partial G/G} =\frac{\partial T}{\partial G} \frac{G}{T} =\frac{1}{1+KG(s)} \]
Por lo tanto, aumentar la ganancia de bucle en un sistema de control de retroalimentación al elegir una ganancia de controlador más grande\(K\), reduce su sensibilidad a las variaciones de parámetros.
Cabe señalar que la función de sensibilidad del sistema, denotada como\(S(s)\), es la misma que la función de transferencia del error,\(e(s)\), a la salida,\(y(s)\). La función de sensibilidad es, por lo tanto, una función de frecuencia. Además\(S(s)+T(s)=1\), donde\(T(s)\) denota la función de transferencia de bucle cerrado.
Sensibilidad de Parámetro
La sensibilidad de la función de transferencia de bucle cerrado\(T(s)\), al cambio porcentual en un parámetro de planta\(\alpha\), se da como:
\[S_{\alpha }^{T} =S_{G}^{T} S_{\alpha }^{G} \]
Ejemplo\(\PageIndex{1}\)
Vamos\(KG(s)=\frac{K}{s(s+a)} ,\; \, \, H(s)=1\); entonces, tenemos:\(T(s)=\frac{K}{s(s+a)+K}\).
Para la retroalimentación de ganancia de unidad, la función de sensibilidad del sistema se calcula como:\(S_{G}^{T} =\frac{s(s+a)}{s(s+a)+K}\).
Además,\( S_{a}^{G} =-\frac{a}{s+a} \); de ahí\( S_{a}^{T} =-\frac{as}{s(s+a)+K} \).
Por lo tanto, aumentar la ganancia de bucle (eligiendo un grande\(K\)) reduce la sensibilidad de\(T(s)\) a las variaciones en\(a\). Sin embargo, aumentar\(K\) reduce la amortiguación en el sistema y da lugar a oscilaciones de salida.
Ejemplo\(\PageIndex{2}\)
El modelo de un pequeño motor de CC se aproxima como:\(G(s)=\frac{k_{t} }{(Js+b)(Ls+R)+k_{t} k_{b} } =\frac{500}{s^{2} +110s+1025}\).
Para la retroalimentación de ganancia de unidad, la función de sensibilidad del sistema se calcula como:
\[S_{G}^{T} =\frac{1}{1+KG(s)}=\frac{s^2+110s+1025}{s^2+110s+500K+1025}\]
Para\(K=10\), tenemos\(S_{G}^{T}=\frac{s^2+110s+1025}{s^2+110s+6025}\).
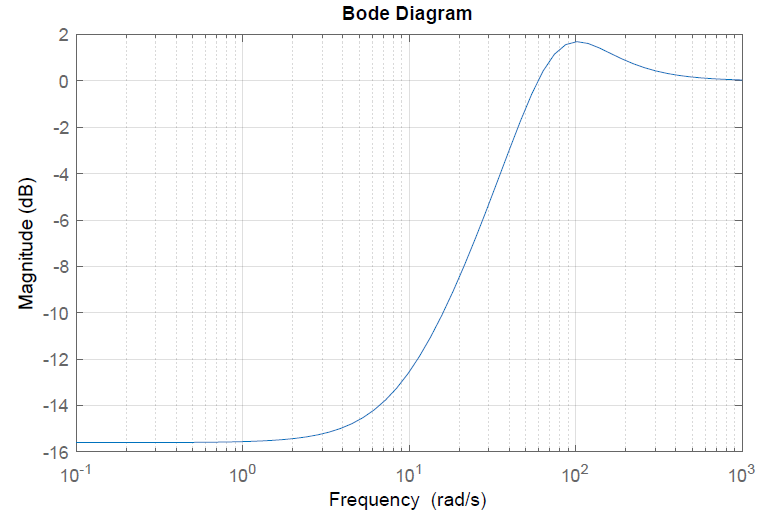
Supongamos que queremos calcular la sensibilidad de\(T\left(s\right)\) a la constante de par motor,\(k_t\); entonces
\[S^G_{k_t}=\frac{s^2+110s+1000}{s^2+110s+1000+500k_t}\]
Para\(k_t=0.05\), obtenemos\(S^G_{k_t}=\frac{s^2+110s+1000}{s^2+110s+1025}\), y por lo tanto
\[S^T_{k_t}=S^G_{k_t}\,S_G^T=\frac{s^2+110s+1000}{s^2+110s+6025}\]
En la Fig. 4.5.1 se muestra una gráfica de magnitud Bode de la función de sensibilidad.