6.3: Diseño de Respuesta de Frecuencia
- Page ID
- 84861

El diseño de respuesta de frecuencia implica agregar un compensador al bucle de retroalimentación para dar forma a la función de respuesta de frecuencia. El diseño tiene como objetivo lograr lo siguiente:
- Un grado deseado de estabilidad relativa e indicado por el margen de fase.
- Una velocidad de respuesta deseada como lo indica la frecuencia de cruce de ganancia.
- Una pendiente leve de\(-1\) (o\(-20dB/\rm decade)\) en el cruce.
La elección de los compensadores en el método de diseño de respuesta de frecuencia incluye el compensador de ganancia, los compensadores de retardo de fase y de avance de fase, y los compensadores PD, PI y PID. Estos se describen a continuación.
Compensación de Ganancia
La compensación de ganancia tiene como objetivo agregar un compensador estático\(K(s)=K\),, al bucle de retroalimentación.
La compensación de ganancia eleva la ganancia de bucle en\(K\); la gráfica de magnitud Bode se desplaza hacia arriba por\(20\; \log _{{\rm 1}0} \; K.\) El cambio resultante en la frecuencia de cruce de ganancia,\(\omega _{{\rm g}c}\), afecta a la\({\rm PM}\).
El margen de fase se reduce para (\(K>1\)) y se incrementa para (\(K<1\)). Además, el ancho de banda del sistema aumenta for (\(K>1\)), lo que mejora la respuesta transitoria al reducir el tiempo de asentamiento. Esto se ilustra en el siguiente ejemplo.
Ejemplo\(\PageIndex{1}\)
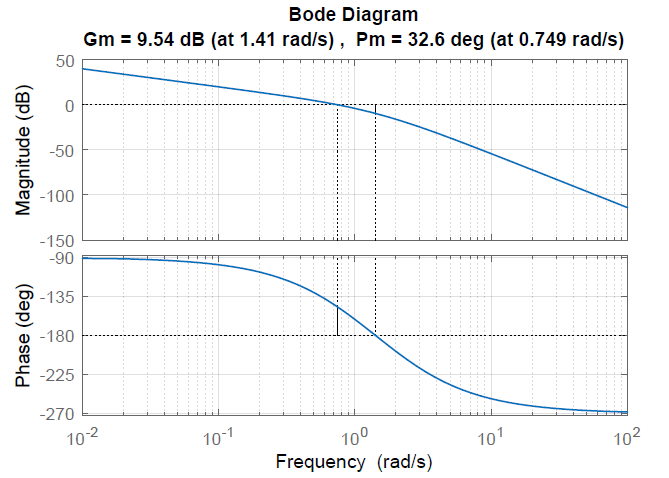
Let\(G(s)=\frac{2}{s(s+1)(s+2)}\); asuma que las especificaciones de rendimiento indican un margen\(50{}^\circ\) phae.
Para\(K=1\), la GM, PM y las frecuencias de cruce se obtienen de MATLAB como:\({\rm GM}=3\; (9.54\; {\rm dB}),\; \; \omega _{\rm pc} =1.41\;\frac{\rm rad}{\rm s} ;\; \rm PM=32.6^{\circ } ,\; \; \omega _{\rm gc} =0.749\; \frac{\rm rad}{\rm s}\).
La frecuencia de cruce de ganancia necesita ser reducida para aumentar el margen de fase. Observamos desde la trama de Bode que\(|G(j0.49)|=5\; \rm dB\) y\(\phi \left(j0.49\right)=-130{}^\circ\).
Por lo tanto, reducir la ganancia de bucle\(5dB\) afectará a un cruce en\({\omega }_{\rm gc}=0.49\; \frac{\rm rad}{\rm s} \) y logrará un\(\rm PM=50^{\circ }\). El compensador de ganancia requerido se da como:\(K=0.56\).
El diseño se verifica trazando la respuesta de frecuencia para la función de transferencia de bucle:\(KG(s)=\frac{1.12}{s(s+1)(s+2)}\), que se muestra\(PM=50^{\circ }\) en el nuevo\(\omega _{\rm gc} =0.49\; \frac{\rm rad}{\rm s}\) (Figura 6.3.1).
Compensación de retraso de fase
En el diseño de respuesta de frecuencia, el compensador de desfase tiene un doble propósito: puede mejorar el margen de fase (una medida de respuesta transitoria), así como la ganancia de CC (una medida de respuesta de estado estacionario).
El compensador de desfase se describe como:
\[ K(s) =\frac{K(1+s/\omega _z )}{1+s/\omega _p } ,\;\; K(j\omega ) =\frac{K(1+j\omega /\omega _ z )}{(1+j\omega /\omega _ p )},\;\; \omega _z >\omega _p \]
Fase de Mejora de Margen. Para\(K=1\), el compensador de desfase se caracteriza por:\(\left|KG\left(j0\right)\right|=0dB\) y\(\left|KG\left(j\infty \right)\right|=-20{log \left(\frac{{\omega }_z}{{\omega }_p}\right)\ }\). Así, la adición del compensador al bucle de retroalimentación disminuirá la frecuencia de cruce de ganancia y aumentará el margen de fase.
Mejora Constante de Error. Alternativamente, let\(K=\frac{{\omega }_z}{{\omega }_p}\); entonces, el compensador de desfase se caracteriza por:\(KG\left(j0\right)=20{log \left(\frac{{\omega }_z}{{\omega }_p}\right)\ }\) y\(KG\left(j\infty \right)=0dB\). Dado que la ganancia de CC del compensador es mayor que uno, la adición del compensador al bucle de retroalimentación aumentará la constante de error relevante en un factor de\(K=\omega _{z} /\omega _{p} \).
Para minimizar la contribución de fase adversa del compensador, el polo compensador y las ubicaciones cero para la mejora del error de estado estacionario deben seleccionarse de acuerdo con:\(\omega _\rm p <\omega _\rm z <0.1\omega _{\rm gc}\), dónde\(\omega _{gc}\) está la frecuencia de cruce de ganancia.
Diseño de Compensador. El diseño del compensador de desfase se resume a continuación:
- Utilice la compensación de ganancia para ajustar la ganancia de CC\(\left|KGH\left(j0\right)\right|\) al valor deseado para cumplir con el requisito de error de estado estacionario.
- En la gráfica Bode de\(KGH(j\omega )\), seleccionar una frecuencia\(\omega _{1}\) a satisfacer\(\angle KGH(j\omega _{1} )=-180^{\circ } +\phi _\rm m +5^{\circ }\), donde\(\phi _\rm m\) está el margen de fase deseado,\(\omega _{1}\) sirve como la nueva frecuencia de cruce de ganancia, y\(5^{\circ }\) es un margen de seguridad para compensar un estimado:\(\angle K(j\omega _{1} )\cong -5^{\circ }\).
- Seleccione el polo compensador y las frecuencias cero como:\(\omega _\rm z \; =\; 0.1\omega _{1} ,\; \omega _\rm p \; =\; \omega _\rm z /|KGH(j\omega _{1} )|\).
- Dibuje la parcela Bode para el sistema compensado y verifique el diseño.
Ejemplo\(\PageIndex{2}\)
Dejar\(G(s)=\frac{2}{s(s+1)(s+2)}\); asumir que las especificaciones de diseño son:\(PM=50^{\circ }\), y\(e_{ss} |_{\rm ramp} <0.1\) (\(K_v >10\)). Luego, el compensador de desfase procede de la siguiente manera:
- Elija\(K=11\) cumplir con el requisito de constante de error.
- De la parcela de Bode para\(KG(j\omega )\); elegir\(\omega _{1} =0.4\; {\rm r}ad/s\) para\(\angle KG(j\omega _{1} )=-123^{\circ }\); entonces,\(\left|{\rm K}G(j\omega _{1} )\right|=24.9\; (28\; \rm dB)\).
- Escoge\(\omega _\rm z =0.04,\; \omega _\rm p =0.0016\); entonces,\(K(s)=\frac{11(1+s/0.04)}{1+s/0.0016}\).
- La gráfica Bode del sistema compensado muestra\(\omega _{{\rm g}c} =0.4\; {\rm r}ad/s\) y\(\rm PM=51^{\circ }\) (Fig. 6.3.2).
Compensación de Plomo de Fase
En el diseño de respuesta de frecuencia, el compensador de derivaciones de fase sirve para aumentar el ancho de banda de bucle cerrado, lo que lleva a mejoras de respuesta transitoria. El compensador de plomo de fase se describe mediante la función de transferencia:
\[K(s)=\frac{K(1+s/\omega _ z )}{1+s/\omega _ p } ,\; \, K(j\omega )=\frac{K(1+j\omega /\omega _ z )}{(1+j\omega /\omega _ p )} ,\; \; \omega _ z <\omega _ p\]
Mejora del ancho de banda. Para\(K=1\), la respuesta del compensador de fase-plomo se caracteriza por:\(\left|KG\left(j0\right)\right|=0dB\) y\(\left|KG\left(j\infty \right)\right|=20{log \left(\frac{{\omega }_p}{{\omega }_z}\right)\ }\).
Dado que la ganancia de alta frecuencia del compensador es mayor que uno, su adición al bucle de retroalimentación aumenta la frecuencia de cruce y el ancho de banda.
El compensador aporta el máximo avance de fase\(\theta _m\) a una frecuencia\(\omega _ m =\sqrt{\omega _ z \omega _p }\).
Para continuar, vamos\(\alpha =\frac{\omega _ p }{\omega _ z }\); entonces,\(\sin \theta _ m \; =\frac{\alpha -1}{\alpha +1}\), o\(\alpha =\frac{1+\sin \theta _ m }{1-\sin \theta _ m \; }\). Además, el polo compensador y las ubicaciones cero se obtienen como:\(\omega _ z =\frac{\omega _ m }{\sqrt{\alpha } } ;\; \omega _ p =\omega _ m \sqrt{\alpha }\).
Prácticamente, el valor máximo alcanzable de\(\theta _ m\) está a punto de\(70^{\circ }\) para\(\sqrt{\alpha }\cong 6\).
La función de transferencia del compensador at\(\omega _ m\) se da como:\(K\left(j{\omega }_m\right)=K\sqrt{\alpha }\). Entonces, a partir de la condición de cruce:\(\left|KGH\left(j{\omega }_{gc}\right)\right|=1\), obtenemos:\(K=\frac{\sqrt{\alpha }}{\left|GH\left(j{\omega }_{gc}\right)\right|}\).
Diseño de Compensador. El diseño de plomo de fase implica los siguientes pasos:
- Elija una frecuencia de cruce deseada\(\omega _{\rm gc}\),, como la mayor de\(\frac{8}{t_ s \tan \phi _ m \; }\) y\(\omega _{1}\) dónde\(\angle KGH(j\omega _{1} )=-180^{\circ } +\phi _\rm m +5^{\circ }\).
- Calentar el ángulo de fase del compensador requerido:\(\theta =\phi _ m -\angle G(j\omega _{\rm gc} )-180^{\circ }\); computar\(|GH(j\omega _{\rm gc} )|.\)
- Resolver para\(\omega _ z\) y\(\omega _ p\).
- Inspeccione la parcela Bode del sistema compensado y verifique el diseño.
Ejemplo\(\PageIndex{3}\)
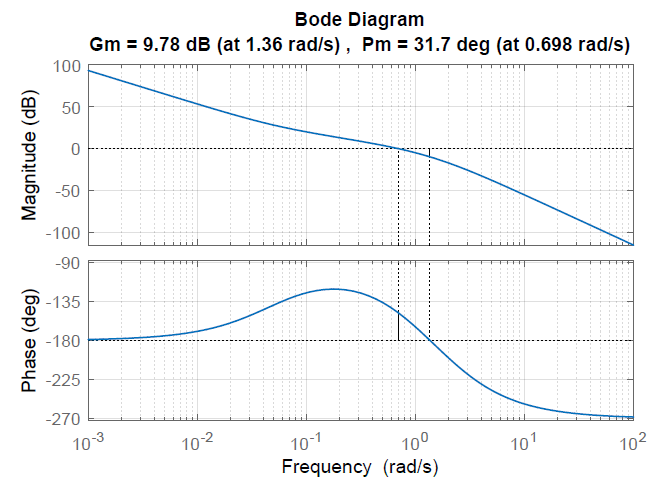
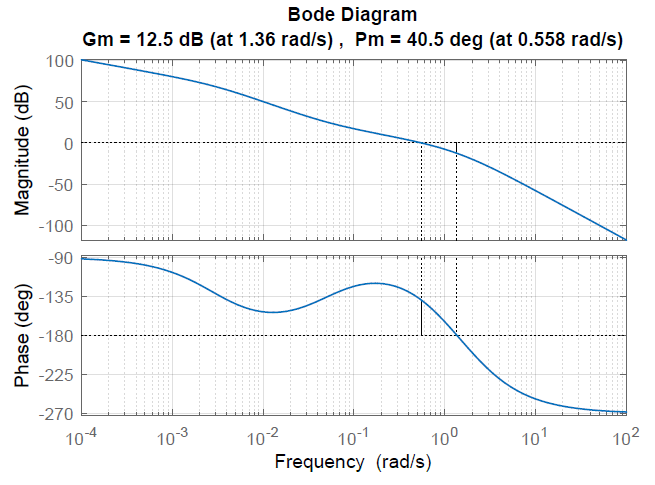
Dejar\(G(s)=\frac{2}{s(s+1)(s+2)}\);\(PM=32.6^{\circ }\). Las especificaciones de diseño son:\(\phi _ m =50^{\circ }\),\(t_ s =4\; \rm s\). Entonces, los pasos de diseño del compensador de fase de plomo son:
- Desde el requisito de tiempo de liquidación, tenemos,\(\omega _{\rm gc} =\frac{2}{\tan \phi _ m } =1.68\; \frac{\rm rad}\rm s ;\;\) entonces,\(\theta =50^{\circ } +9^{\circ } =59^{\circ } \cong 60^{\circ }\). Además,\(G(j1.68)=0.23\; \angle -189^{\circ } .\)
- Para\(\theta =60{}^\circ\), tenemos\(\alpha =13.93\); el diseño de fase de plomo se da como:
\({\omega }_z=0.45\frac{\rm rad}{\rm s}\),\({\omega }_p=6.27\frac{\rm rad}{\rm s}\),\(K=16\); así\(K\left(s\right)=16\left(\frac{s+0.45}{s+6.27}\right)\)
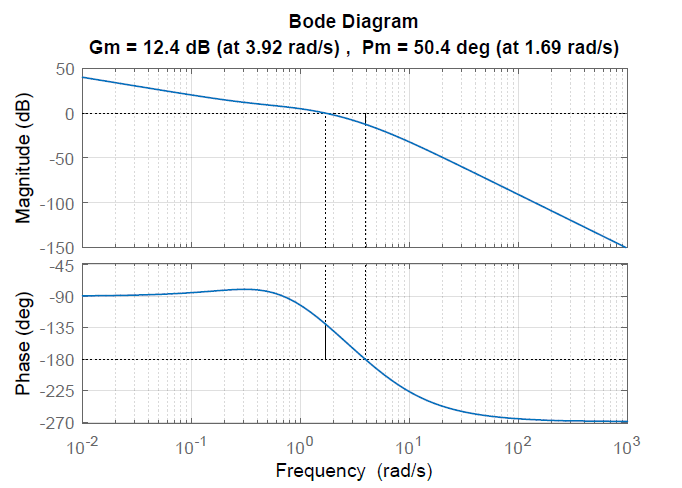
La gráfica Bode del sistema compensado tiene\(\phi _{m} =50.4^{\circ }\) at\(\omega _{{\rm g}c} =1.69\; \frac{\rm rad}{\rm s}\) (Figura 6.3.3).
Compensación de Lead y Lag
Un compensador de lead-lag combina las secciones fase-ventaja y fase-lag. La sección phase lag mejora el margen de fase y la ganancia dc; la sección phase lead mejora el ancho de banda y el margen de fase. Dado que tanto las secciones de plomo como de rezago pueden contribuir a la mejora del margen de fase, la mejora de PM deseada se puede distribuir entre las dos secciones.
La función de transferencia del compensador de plomo-retraso se da como:\(K(s)=K_{lead} (s)K_{lag} (s).\)
Los pasos para diseñar un compensador de plomo-retraso son los siguientes:
- Elija ganancia estática\(K\) para cumplir con el requisito de error de estado estacionario.
- Diseñe la sección de desfase para cumplir con parte del requisito de margen de fase.
- Diseñe la sección de avance de fase para cumplir con el requisito de ancho de banda/tiempo de asentamiento.
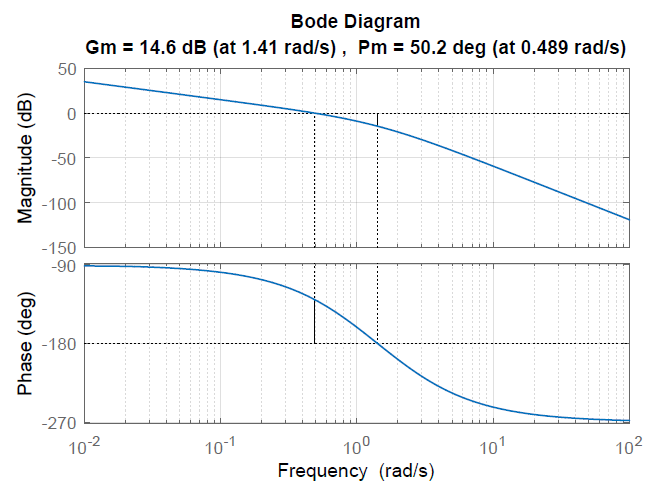
Ejemplo\(\PageIndex{4}\)
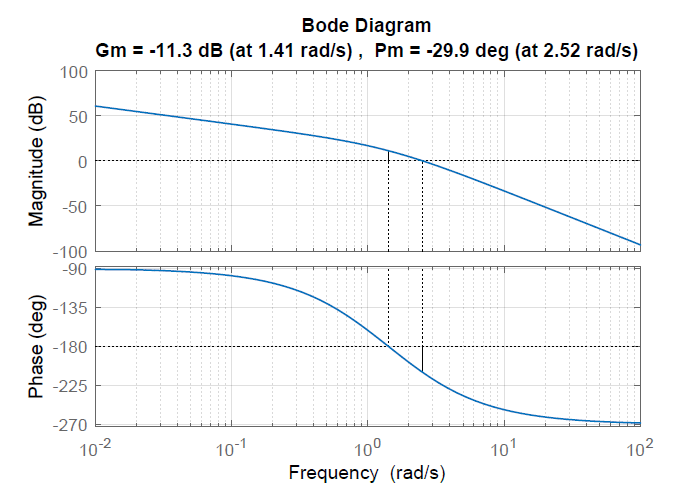
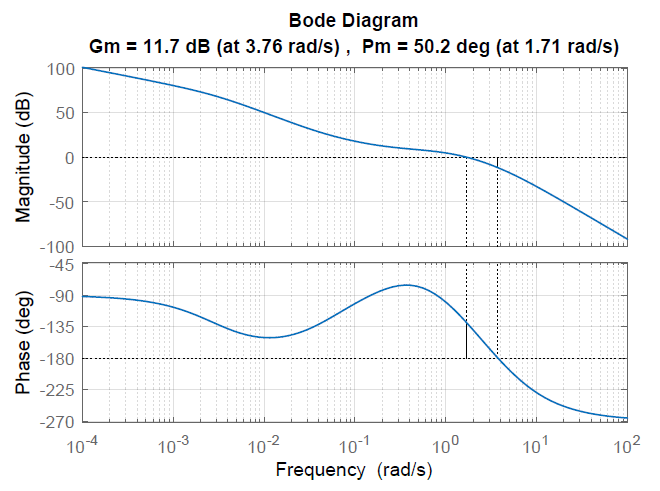
Dejar\(G(s)=\frac{2}{s(s+1)(s+2)}\); asumir que las especificaciones de diseño son:\(\phi _ m =50^{\circ }\),\(t_ s =4s\), y\(e_{\rm ss} |_{\rm ramp} \; <0.1\). Los pasos de diseño para el diseño de plomo retrasado son los siguientes:
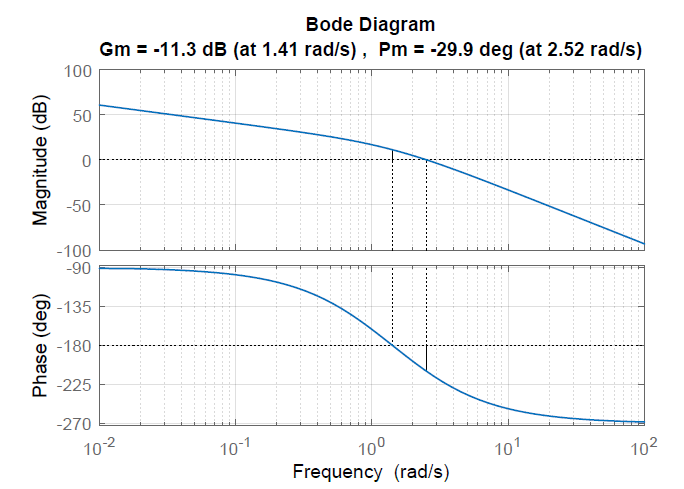
- Ganancia de CC. Elija\(K=10\) cumplir con el\(e_{\rm ss}\) requisito. Dibuja la trama de Bode para\(KG(s)\). La parcela cuenta con\(\omega _{{\rm g}c} =2.5\; {\rm rad/s}\) y\(\rm PM=-30^{\circ }\).
- Diseño de retardo de fase. Supongamos que pretendemos elevar el margen de fase a\(\rm PM\approx 40^{\circ }\). De la trama de Bode, vamos\(\omega _{1} =0.5\; {\rm rad/s}\), tal que\(KG\; (j0.5)=18.6\; (25.8\; \rm dB)\angle -130^{\circ }\).
- Complete el diseño de retraso de fase con:\(\omega _\rm z =0.05,\; \omega _\rm p =0.003.\)
- Diseño de Plomo de Fase. De la parcela Bode de\(K_{lag} G(j\omega )\) elegir\(\omega _{\rm gc} =1.7\; {\rm rad/s}\) para cumplir con el\(t_s\) requisito. Entonces,\(K_{lag} G(j1.7)=0.15\; (-16.5\; \rm dB)\angle -191^{\circ } .\)
- Calentar los parámetros del compensador de fase:\(\theta =62^{\circ }\),\(\alpha =16,\ K=26.7,\ {\omega }_z=0.425\ rad/s,\ {\omega }_p=6.8\ {\rm rad/s}\).
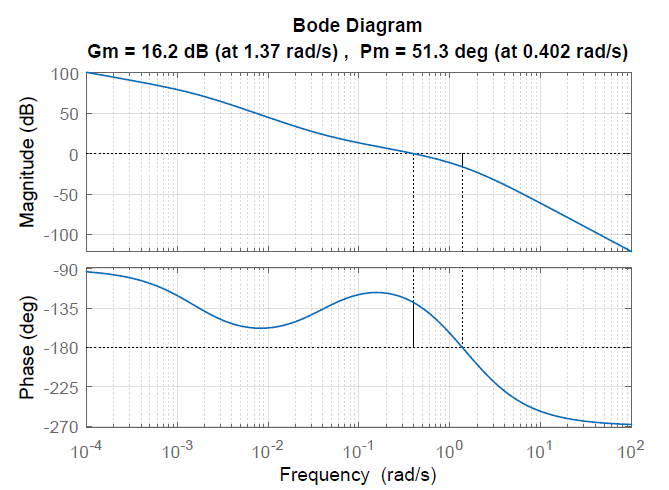
- El compensador de plomo-retraso se describe como:\(K(s)=\frac{11(s+0.05)(s+0.24)}{(s+0.003)(s+4.7)}\). La gráfica Bode para el sistema compensado tiene\(\rm PM=50.2^{\circ }\) at\(\omega =1.71\; {\rm rad/s}\) (Figura 6.3.4).
El compensador PID
El compensador PID es una combinación de las secciones PI y PD. El compensador PI agrega un integrador al bucle de retroalimentación que reduce el error de estado estacionario a cero; el compensador PI también puede realizar el requisito de PM. El compensador PI se define como:
\[K(s)=k_{p} +\frac{k_{i} }{s} ,\;\; K(j\omega ) =\frac{k_{i} (1+j\omega /\omega _{z} )}{j\omega } ,\;\;\omega _{z} =\frac{k_{i} }{k_{p} }\]
El compensador PI cero se ubica arbitrariamente cerca del origen. La ganancia\(k_i\) se selecciona para lograr una mejora de PM deseada.
El compensador PD agrega un cero de primer orden a la función de transferencia de bucle, lo que aumenta el ancho de banda y por lo tanto la respuesta transitoria. El compensador PD se define como:
\[K(s)=k_{d} s+k_{p} ,\; K(j\omega )=k_{p} (1+j\omega /\omega _{z} )\]
El cruce de ganancia deseado\(\omega _{gc}\) se selecciona como el mayor de\(\frac{8}{t_ s \tan \phi _ m }\) y\(\omega _{1}\), donde\(\omega _{1}\) se encuentra de la gráfica Bode para\(\angle KGH(j\omega _{1} )=-180^{\circ } +\phi _\rm m -90^{\circ } +5^{\circ } ;\) el\(90^{\circ }\) término en esta expresión se refiere a la fase agregada por el compensador PD, y\(5^{\circ }\) es un margen de seguridad.
La ubicación cero del compensador se puede seleccionar como:\({\omega }_z=0.1{\omega }_{gc}\); la ganancia del compensador\(k_p\) se selecciona para cumplir con la condición de cruce:\(|KGH(j\omega _{gc} )|=1\).
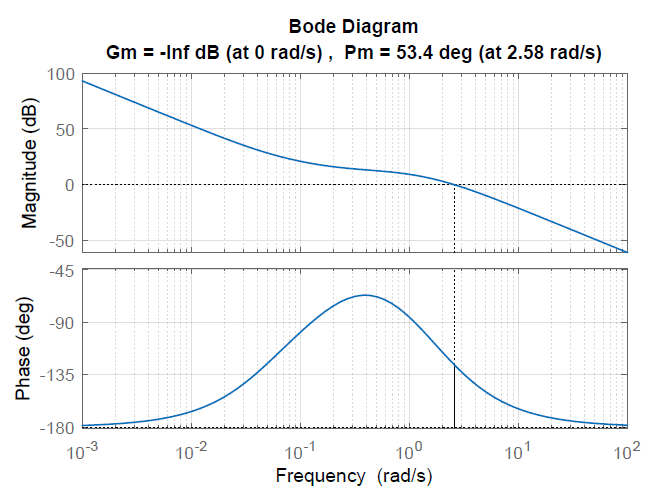
Ejemplo\(\PageIndex{5}\)
Dejar\(G(s)=\frac{2}{s(s+1)(s+2)}\); asumir que las especificaciones de diseño son:\(\phi _ m =50^{\circ }\),\(t_ s =4\; \rm s\), y\(e_{\rm ss} |_{\rm ramp} <0.1\).
No se necesita ningún ajuste de ganancia ya que el compensador PI aumentará la constante de error de posición\(K_{\rm p}\to\infty\).
- Diseño de PI. Nuestro objetivo es lograr\(PM=30{}^\circ\) en la sección PI. El argumento de Bode para\(G(j\omega )\) tiene\(G(j0.8)=0.9\; \angle -150^{\circ } .\) Let\(\omega _z =0.05\); entonces\(K_{PI} (s)=\frac{0.9(s+.05)}{s}\).
- Diseño PD. Desde el requisito de tiempo de asentamiento,\(\omega _{\rm gc} =\frac{2}{\tan \phi _\rm m } \cong 1.7\; \frac{\rm rad}{\rm s} ;\;\) desde el requisito de ángulo de fase,\(\omega _{1} =2.5\; \frac{\rm rad}{\rm s}\); de ahí,\(\omega _{\rm gc} =2.5\; \frac{\rm rad}{\rm s};\) la gráfica de Bode de\(K_{PI} G(j\omega )\) muestra\(G(j2.5)=0.1\; \angle -210^{\circ } .\)
- El compensador PD es cero seleccionado como:\(\omega _ z =0.2\; \frac{\rm rad}{\rm s} ,\; K_{PD} (s)=5(s+0.2)\).
- El compensador PID se da como:\(K(s)=\frac{4.5(s+0.05)(s+0.2)}{s}.\) La gráfica Bode del sistema compensado tiene\(\phi _ m =53.4^{\circ }\) en\(\omega _{\rm gc} =2.58\; \frac{\rm rad}{\rm s}\) (Figura 6.3.5).