
4.5: Planeación en diferentes escalas de longitud
- Page ID
- 84937

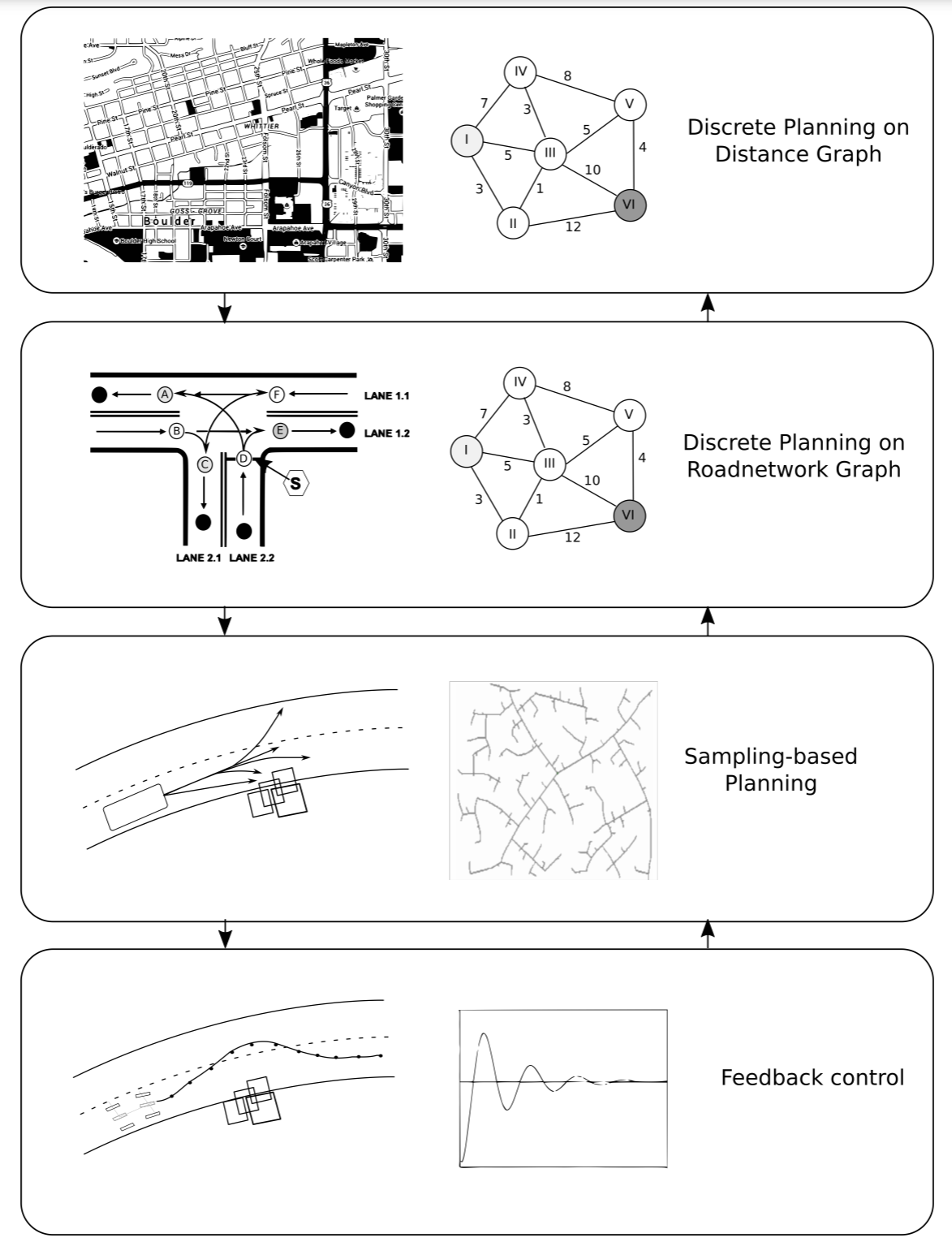
En la práctica, ningún algoritmo de representación y planeación de mapas podría ser suficiente. Planificar una ruta para un automóvil, por ejemplo, podría implicar una búsqueda aproximada a través de la red de calles, como la realizada por el sistema de navegación de su automóvil, pero no implicar planificar qué carril elegir realmente. Planear carriles y cómo navegar por las circunvalaciones e intersecciones implicará entonces otra capa de planeación discreta. La forma de mover realmente el robot dentro de un carril y evitar los obstáculos locales, podría hacerse mejor con un algoritmo de planificación basado en muestreo. Finalmente, las trayectorias deben convertirse en velocidades de rueda y ángulos de giro, posiblemente usando alguna forma de control de retroalimentación. Esta jerarquía se representa en la Figura 4.7. Aquí, las matrices que apuntan hacia abajo indican la entrada que una capa de planificación proporciona a la siguiente. Las flechas que apuntan hacia arriba indican excepciones que no pueden ser manejadas por los niveles inferiores. Por ejemplo, un controlador de retroalimentación no puede manejar bien los obstáculos, lo que requiere que la capa de planificación basada en muestreo genere una nueva trayectoria. Si se bloqueara toda la carretera, este planificador tendría que entregar el control del planificador basado en carriles. Un caso similar se puede hacer para manipular robots, que también necesitan combinar múltiples representaciones y controladores diferentes para planificar y ejecutar trayectorias de manera eficiente.
Tenga en cuenta que esta representación no incluye un nivel de razonamiento que codifica reglas de tráfico y sentido común. Si bien algunos de estos podrían codificarse usando funciones de costo, como maximizar la distancia desde los obstáculos o asegurar una conducción suave, otros comportamientos más complejos como adaptar la conducción en presencia de ciclistas o propiedades del suelo deben implementarse en una capa vertical adicional que tenga acceso a todas las capas de planeación.