
5.3: Sensores que utilizan luz
- Page ID
- 84971

El factor de forma pequeño y el bajo precio de los semiconductores sensibles a la luz han llevado a una proliferación de sensores basados en la luz que se basan en una multitud de efectos físicos. Estos incluyen reflexión, desplazamiento de fase y tiempo de vuelo.
5.3.1. Reflexión
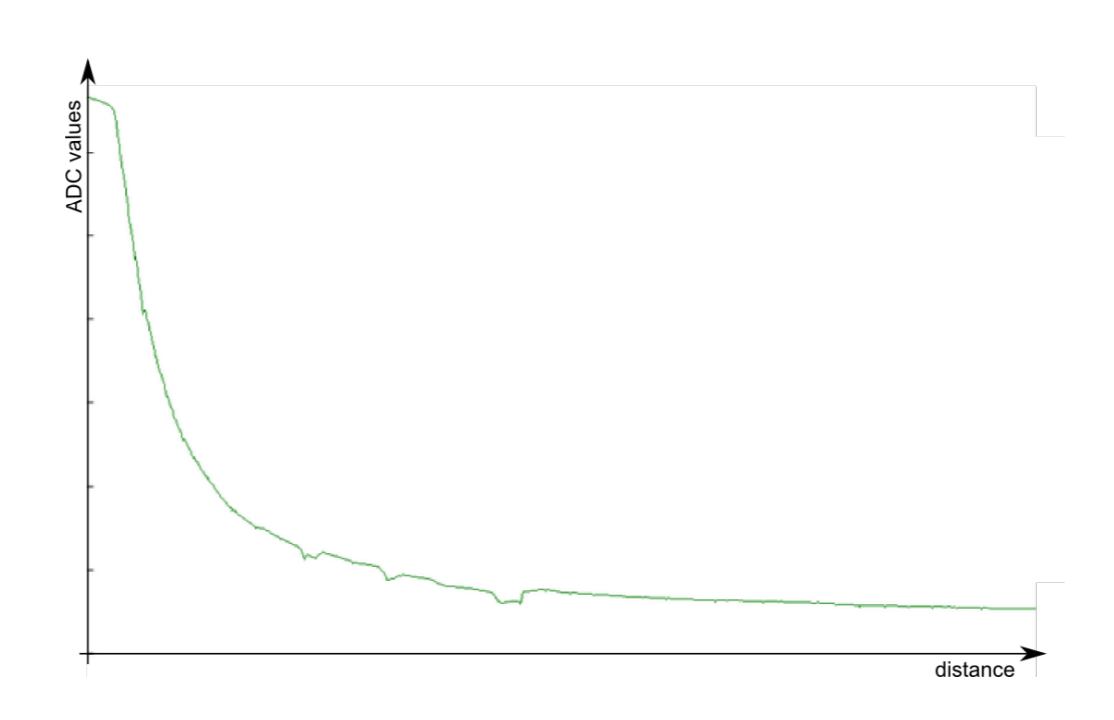
La reflexión es uno de los principios que es más fácil de explotar: cuanto más cerca está un objeto, más refleja la luz que le brillaba. Esto permite medir fácilmente la distancia a objetos que reflejan bien la luz y no están muy lejos. Para que estos sensores sean independientes del color de un objeto (pero desafortunadamente no totalmente independientes), el infrarrojo es el más comúnmente elegido. Un sensor de distancia está hecho de dos componentes: un emisor y un receptor. Funcionan emitiendo una señal infrarroja y luego midiendo la intensidad de la señal reflejada. Una respuesta típica se muestra en la Figura 5.3.1. Los valores obtenidos en un convertidor analógico-digital corresponden al voltaje en el receptor de infrarrojos y se saturan para distancias bajas (línea plana), y luego se caen cuadráticamente.
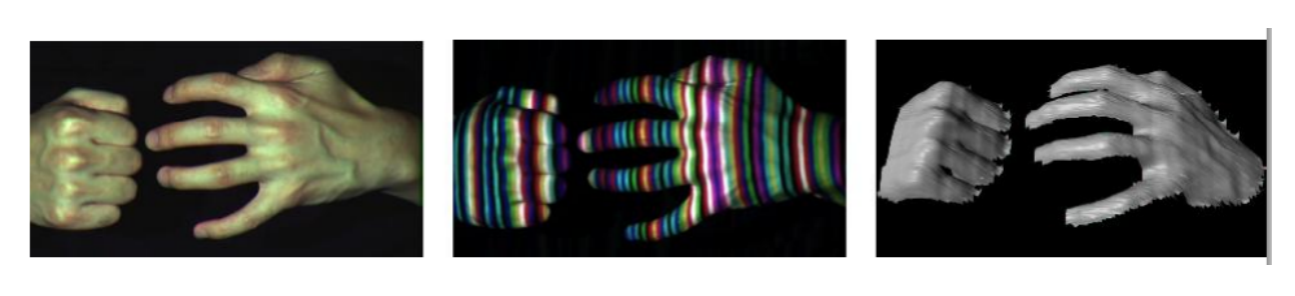
Al usar más de un par sensor/emisor de infrarrojos, por ejemplo, usar una cámara y un proyector no solo permite medir la distancia de muchos puntos a la vez, sino también evaluar la estructura del entorno calculando su impacto en la deformación de los patrones. Por ejemplo, una línea recta se convierte en una curva cuando se proyecta sobre una superficie redonda. Este enfoque se conoce como luz estructurada y se ilustra en la Figura 5.3.2. Gracias a la creciente eficiencia de los sistemas computacionales, una versión liviana de dicho enfoque se ha vuelto factible para implementarse a pequeña escala y bajo costo alrededor de 2010, y emergió como un nuevo estándar en detección robótica.
En lugar de usar patrones de línea, los sensores de imagen de profundidad basados en infrarrojos utilizan un patrón de moteado (una colección de puntos distribuidos aleatoriamente con distancias variables) y dos conceptos de visión por computadora: profundidad desde el enfoque y profundidad desde estéreo. Cuando se usa una lente con una profundidad focal estrecha, los objetos que están más cerca o más lejos aparecen borrosos (puedes observar esto fácilmente en fotos de retratos profesionales, que a menudo usan este efecto con fines estéticos). Por lo tanto, medir la “borrosidad” de una escena (para parámetros de cámara conocidos) permite una estimación inicial de la profundidad. En cambio, la profundidad del estéreo funciona midiendo la disparidad del mismo objeto que aparece en dos imágenes tomadas por cámaras que están a una distancia conocida. Poder identificar el mismo objeto en ambos fotogramas permite calcular esta disparidad, y a partir de ahí la distancia del objeto. (Cuanto más lejos esté el objeto, menor es la disparidad). Aquí es donde el patrón de moteado viene muy bien, que simplemente requiere buscar manchas de tamaño similar que estén cerca unas de otras.
5.3.2. Desplazamiento de fase
Como puede ver en la Figura 5.3.1, la reflexión sólo puede ser precisa si las distancias son cortas. En lugar de medir la intensidad (también conocida como amplitud) de la señal reflejada, los sensores de distancia láser miden la diferencia de fase de la onda reflejada. Para ello, la luz emitida se modula con una longitud de onda que excede la distancia máxima que el escáner puede medir. Si usaras luz visible y hicieras esto mucho más lento, verías una luz que sigue haciéndose más brillante, luego oscureciéndose, se apaga brevemente y luego comienza a volverse más brillante nuevamente. Así, si trazaras la amplitud, es decir, su brillo, de la señal emitida vs. tiempo verías una onda que tiene cruces por cero cuando la luz es oscura. A medida que la luz viaja con la velocidad de la luz, esta onda se propaga a través del espacio con una distancia constante (la longitud de onda) entre sus cruces por cero. Cuando se refleja, la misma onda viaja hacia atrás (o al menos partes de ella que se dispersan justo atrás). Por ejemplo, los escáneres láser modernos emiten señales con una frecuencia de 5 MHz (apagando 5 millones de veces en un segundo). Junto con la velocidad de la luz de aproximadamente 300.000km/s, esto conduce a una longitud de onda de 60m y hace que dicho escáner láser sea útil hasta 30m.
Cuando el láser se encuentra ahora a una distancia que corresponde exactamente a la mitad de la longitud de onda, la señal reflejada que mide será oscura exactamente al mismo tiempo que su onda emitida pasa por un cruce por cero. Acercarse al obstáculo da como resultado un desplazamiento que se puede medir. Como el emisor conoce la forma de la onda que emitió, puede calcular la diferencia de fase entre la señal emitida y la recibida. Conociendo la longitud de onda ahora puede calcular la distancia. Como este proceso es independiente de la luz ambiental (a menos que tenga exactamente la misma frecuencia que el láser que se está utilizando), las estimaciones pueden ser muy precisas. Esto contrasta con un sensor que utiliza la intensidad de la señal. A medida que la intensidad de la señal disminuye al menos cuadráticamente, pequeños errores, por ejemplo, debido a fluctuaciones en la fuente de alimentación que impulsa la luz emisora, ruido en el convertidor analógico-digital, o simplemente diferencias en la superficie reflectante tienen un impacto drástico en la precisión y precisión (vea más abajo para una forma más formal definición de este término).
Como el proceso de medición de distancia láser es rápido, dichos láseres se pueden combinar con espejos giratorios para barrer áreas más grandes, conocidos como escáneres de rango láser. Dichos sistemas se han combinado en paquetes que constan de hasta 64 láseres de escaneo, proporcionando un mapa de profundidad alrededor de un automóvil mientras se conduce, por ejemplo. También es posible modular imágenes proyectadas con una señal de cambio de fase, que es el principio operativo de las cámaras tempranas de “tiempo de vuelo”, que no es una precisión descripción de su funcionamiento, sin embargo.
5.3.3. Tiempo de vuelo
Las medidas de distancia más precisas que la luz puede proporcionar es midiendo su tiempo de vuelo. Esto se puede hacer contando el tiempo en que una señal del emisor se vuelve visible en el receptor. Como la luz viaja muy rápido (3,000,000,000m/s), esto requiere electrónica de alta velocidad que pueda medir periodos de tiempo menores que los nano-segundos para lograr una precisión de centímetros. En la práctica esto se hace combinando el receptor con un obturador muy rápido (electrónico) que opera a la misma frecuencia con la que se emite luz. Como se conoce esta sincronización, se puede inferir el tiempo que la luz debe haber estado viajando midiendo la cantidad de fotones que han regresado de la superficie reflectante dentro de un período de obturación. Considerando un ejemplo concreto, la luz viaja 15m en 50ns. Por lo tanto, tomará un pulso 50ns para regresar de un objeto a una distancia de 7.5m. Si la cámara envía un pulso de 50ns de longitud y luego cierra el receptor con un obturador, el receptor recibirá más fotones cuanto más cerca esté el objeto, pero no fotones si el objeto está más lejos que 7.5m. Dado un circuito lo suficientemente rápido y preciso que actúa como obturador, es suficiente para medir la cantidad real de luz que regresa del emisor.