
12.3: Mapeo RGB-D
- Page ID
- 85021

El algoritmo ICP se puede utilizar para unir imágenes de rango consecutivo para crear un mapa 3D del entorno (Henry, Krainin, Herbst, Ren & Fox 2010). Junto con la información RGB, es posible crear recorridos completos en 3D de un entorno. Un ejemplo de tal recorrido utilizando el método descrito en (Whelan, Johannsson, Kaess, Leonard & McDonald 2013) se muestra en la Figura 12.3.1. Un problema con ICP es que los errores en cada transformación se propagan haciendo que los mapas creados con este método sean tan impares como los mapas creados por simple odometría. Aquí, el algoritmo SLAM se puede utilizar para corregir errores anteriores una vez que se detecta un cierre de bucle.
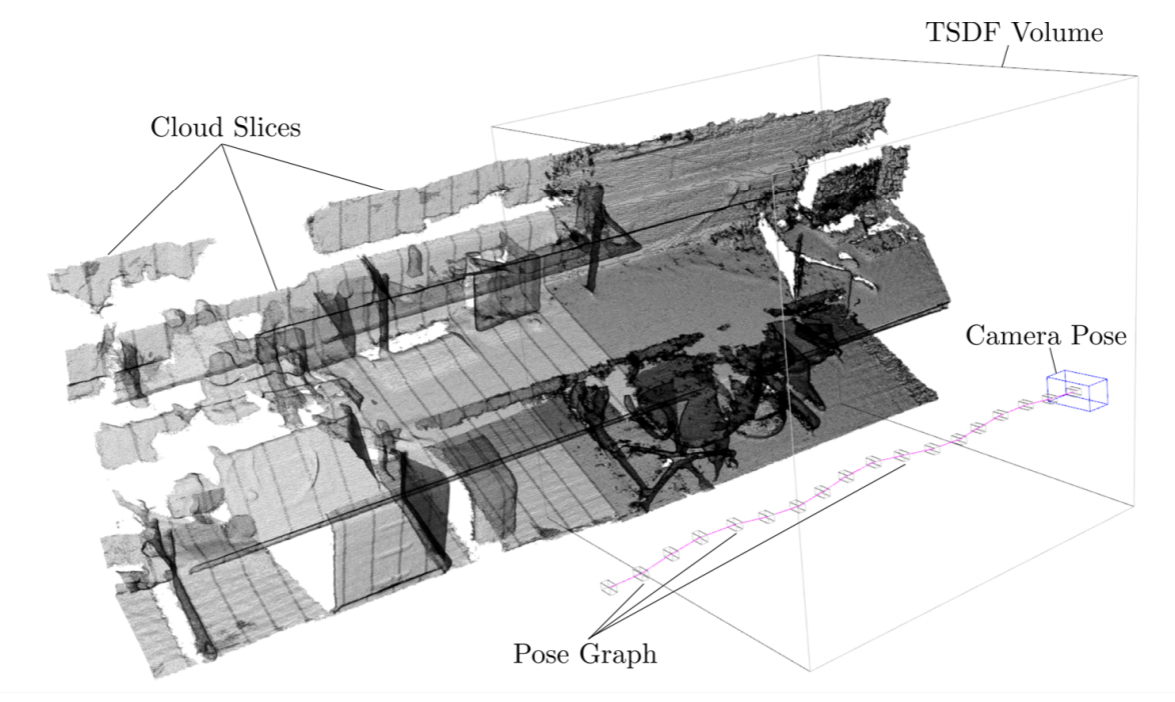
La intuición detrás de SLAM es considerar cada transformación entre instantáneas consecutivas como un resorte con rigidez variable. Siempre que el robot regresa a una ubicación previamente vista, es decir, se ha determinado un cierre de bucle, se introducen restricciones adicionales y la colección de instantáneas conectadas por resortes se convierte en una malla. Cada vez que el robot vuelve a observar una transformación entre cualquiera de las instantáneas, puede “endurecerse” el resorte que conecta las dos. Como todas las instantáneas están conectadas, estas nuevas restricciones se propagan a través de la red y literalmente extraen cada una de las instantáneas en su lugar.
El mapeo RGB-D utiliza una variante de ICP que es mejorada por las características SIFT para la selección y coincidencia de puntos. Los mapas se construyen de manera incremental. Las características SIFT, y su relación espacial, se utilizan para detectar cierres de bucle. Una vez que se detecta un cierre de bucle, se agrega una restricción adicional al gráfico de pose y un algoritmo de optimización similar a Slam corrige la pose de todas las observaciones anteriores.
Como ICP solo funciona cuando ambas nubes de puntos ya están estrechamente alineadas, lo que podría no ser el caso de un robot de movimiento rápido con un sensor relativamente ruidoso (el XBox Kinect tiene un error de 3cm para unos pocos metros de alcance vs. milímetros en escáneres de rango láser), RGB-D Mapping usa RANSAC para encontrar una inicial transformación. Aquí, RANSAC funciona como para el ajuste de línea: sigue adivinando posibles transformaciones para 3 pares de puntos característicos de SIFT y luego cuenta el número de inliers al hacer coincidir las dos nubes de puntos, una de las cuales se transforma usando la suposición aleatoria.