
5.4: Método de Juntas
- Page ID
- 83859

El método de juntas es un proceso utilizado para resolver las fuerzas desconocidas que actúan sobre miembros de una armadura. El método se centra en las uniones o puntos de conexión entre los miembros, y suele ser la forma más rápida y sencilla de resolver todas las fuerzas desconocidas en una estructura de celosía.
Usando el Método de Juntas:
El proceso utilizado en el método de juntas se describe a continuación.
Al principio, suele ser útil etiquetar los miembros y las juntas en tu truss. Esto te ayudará a mantener todo organizado y consistente en análisis posteriores. En este libro, los miembros serán etiquetados con letras y las articulaciones se etiquetarán con números.
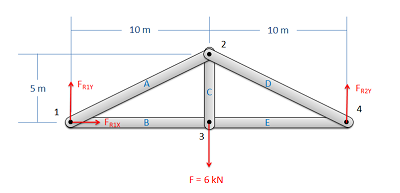
Tratar toda la estructura de celosía como un cuerpo rígido, dibujar un diagrama de cuerpo libre, escribir las ecuaciones de equilibrio y resolver las fuerzas de reacción externas que actúan sobre la estructura de celosía. Este análisis no debe diferir del análisis de un solo cuerpo rígido.
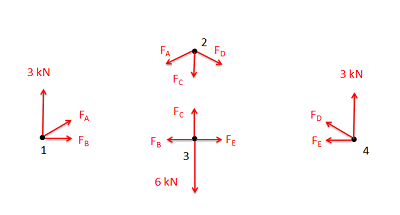
Supongamos que hay un pin o alguna otra pequeña cantidad de material en cada uno de los puntos de conexión entre los miembros. A continuación dibujará un diagrama de cuerpo libre para cada punto de conexión. Recuerda incluir:
- Cualquier reacción externa o fuerzas de carga que puedan estar actuando en esa articulación.
- Una fuerza normal para cada dos miembros de fuerza conectados a esa articulación. Recuerde que para un miembro de dos fuerzas, la fuerza actuará a lo largo de la línea entre los dos puntos de conexión en el miembro. También tendremos que adivinar si será una fuerza de tracción o de compresión. Sin embargo, una suposición incorrecta ahora simplemente conducirá a una solución negativa más adelante. Una estrategia común entonces es asumir que todas las fuerzas son de tracción, luego en la solución cualquier fuerza positiva será fuerzas de tracción y cualquier fuerza negativa serán fuerzas de compresión.
- Etiquete cada fuerza en el diagrama. Incluya las magnitudes y direcciones conocidas y proporcione nombres de variables para cada desconocido.
- Escribe las ecuaciones de equilibrio para cada una de las articulaciones. Se deben tratar las articulaciones como partículas, por lo que habrá ecuaciones de fuerza pero no ecuaciones de momento. Con dos (para problemas 2D) o tres (para problemas 3D) ecuaciones para cada articulación; esto debería darte un gran número de ecuaciones.
- En cerchas planas, la suma de las fuerzas en la\(x\) dirección será cero y la suma de las fuerzas en la\(y\) dirección será cero para cada una de las juntas. \[ \sum \vec{F} = 0 \]\[ \sum F_x = 0 \, ; \,\,\, \sum F_y = 0 \]
- En las cerchas espaciales, la suma de las fuerzas en la\(x\) dirección será cero, la suma de las fuerzas en la\(y\) dirección será cero, y la suma de fuerzas en la\(z\) dirección será cero para cada una de las juntas. \[ \sum \vec{F} = 0 \]\[ \sum F_x = 0 \, ; \,\,\, \sum F_y = 0 \, ; \,\,\, \sum F_z = 0 \]
- Finalmente, resolver las ecuaciones de equilibrio para las incógnitas. Puedes hacer esto algebraicamente, resolviendo para una variable a la vez, o puedes usar ecuaciones matriciales para resolver para todo a la vez. Si asumiste que todas las fuerzas fueron de tracción antes, recuerda que las respuestas negativas indican fuerzas de compresión en los miembros.
Ejemplo\(\PageIndex{1}\)
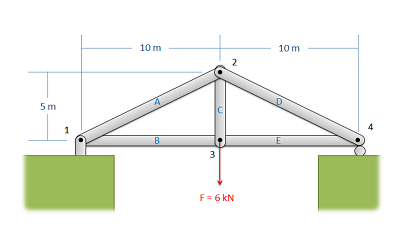
Encuentra la fuerza que actúa en cada uno de los miembros en el puente de armadura que se muestra a continuación. Recuerde especificar si cada miembro está en tensión o compresión.
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/vowewkEdTzw.
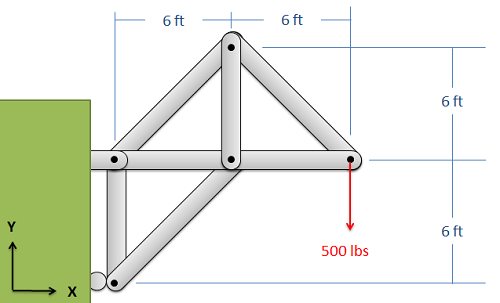
Ejemplo\(\PageIndex{2}\)
Encuentra la fuerza que actúa en cada uno de los miembros de la armadura que se muestra a continuación. Recuerde especificar si cada miembro está en tensión o compresión.
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/IxnClZ-ppjM.
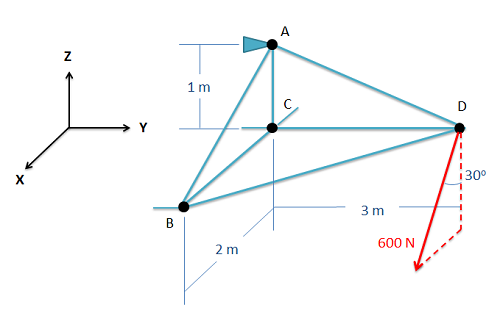
Ejemplo\(\PageIndex{3}\)
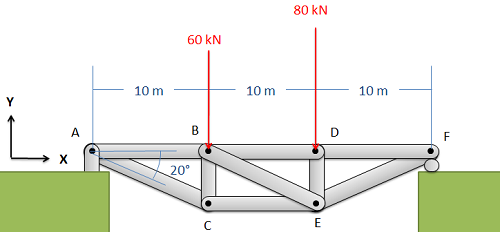
Encuentra la fuerza que actúa en cada uno de los miembros de la armadura que se muestra a continuación. Recuerde especificar si cada miembro está en tensión o compresión.
- Solución
-
Video\(\PageIndex{4}\): Solución trabajada a problema de ejemplo\(\PageIndex{3}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/sDKESSbufEk.