
5.6: Marcos y Máquinas
- Page ID
- 83847

Un bastidor o una máquina es una estructura de ingeniería que contiene al menos un miembro que no es un miembro de dos fuerzas.
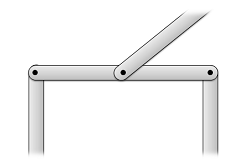
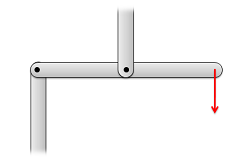
Un marco es una estructura rígida, mientras que una máquina no es rígida. Esto significa que ninguna pieza puede moverse en relación con las otras partes en un marco, mientras que las partes pueden moverse una con relación a la otra en una máquina. Aunque hay una diferencia en el vocabulario en la descripción de marcos y máquinas, se agrupan aquí porque usamos el mismo proceso para analizar ambas estructuras.


Análisis de Marcos y Máquinas:
Cuando hablamos de analizar bastidores o máquinas, generalmente buscamos identificar tanto las fuerzas externas que actúan sobre la estructura como las fuerzas internas que actúan entre los miembros dentro de la estructura.
El método que utilizamos para analizar marcos y máquinas (sin nombre especial aquí) se centra en el proceso de descomponer la estructura en componentes individuales y analizar cada componente como un cuerpo rígido. Donde están conectados los componentes, la Tercera Ley de Newton establece que cada cuerpo ejercerá una fuerza igual y opuesta sobre el otro cuerpo. Cada componente será analizado como un cuerpo rígido independiente que conducirá a ecuaciones de equilibrio para cada componente, pero debido a la Tercera Ley de Newton, algunas incógnitas pueden aparecer actuando sobre dos cuerpos.