
6.7: Fricción de Correa
- Page ID
- 83776

En cualquier sistema donde una correa o un cable se envuelva alrededor de una polea o alguna otra superficie cilíndrica, tenemos el potencial de fricción entre la correa o cable y la superficie con la que está en contacto. En algunos casos, como una cuerda sobre una rama de árbol que se utiliza para levantar un objeto, las fuerzas de fricción representan una pérdida. En otros casos como un sistema accionado por correa, estas fuerzas de fricción se ponen en uso transfiriendo potencia de una polea a otra polea.


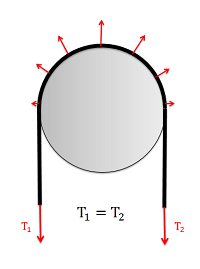
Para el análisis, iniciaremos una cinta plana y sin masa que pasa sobre una superficie cilíndrica. Si tenemos una tensión igual en cada correa, la correa experimentará una fuerza normal no uniforme desde el cilindro que la está soportando.
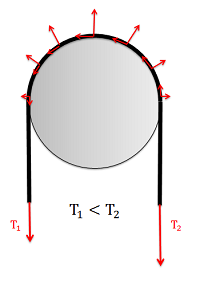
En un escenario sin fricción, si tuviéramos que aumentar la tensión en un lado de la cuerda comenzaría a deslizarse a través del cilindro. Sin embargo, si existe fricción entre la cuerda y la superficie, la fuerza de fricción se opondrá con el movimiento deslizante y evitará que llegue hasta un punto.
Fricción en Correas Planas
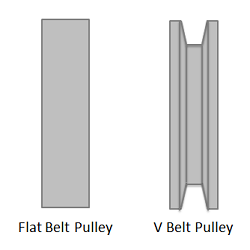
Una correa plana es cualquier sistema donde la polea o superficie solo interactúa con la superficie inferior de la correa o cable. Si la correa o cable en su lugar encaja en una ranura, entonces se considera una correa en V.
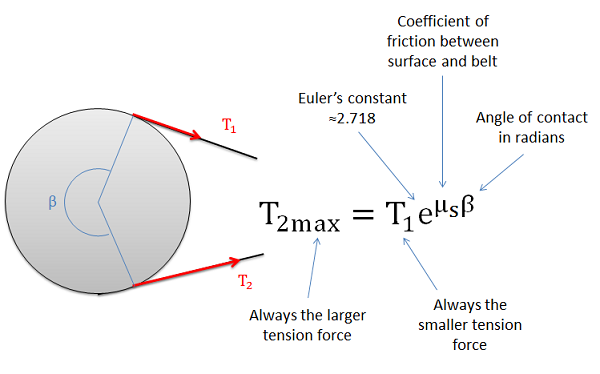
Al analizar sistemas con correas, generalmente nos interesa el rango de valores para las fuerzas de tensión donde la cinta no se deslizará con relación a la superficie. Comenzando con la menor fuerza de tensión en un lado\((T_1)\), podemos aumentar la segunda fuerza de tensión\((T_2)\) a algún valor máximo antes de deslizarse. Para una correa plana, el valor máximo para\(T_2\) dependerá del valor de\(T_1\), el coeficiente estático de fricción entre la correa y la superficie, y el ángulo de contacto entre la banda y la superficie\((\beta)\) dado en radianes, como se describe en la ecuación a continuación.
\[T_{2_{max}} = T_1 \, e ^ {\mu_s \beta} \]
Fricción en Correas V
Una correa en V es cualquier correa que encaja en una ranura en una polea o superficie. Para que la correa en V sea efectiva, la correa o cable deberá estar en contacto con los lados de la ranura, pero no con la base de la ranura como se muestra en el diagrama a continuación. Con las fuerzas normales en cada lado, los componentes verticales deben sumar lo mismo que tendría la correa plana, pero los componentes horizontales agregados de las fuerzas normales, que se cancelan entre sí, aumentan el potencial de fuerzas de fricción.
La ecuación para la diferencia máxima de tensiones en los sistemas de correa en V es similar a la ecuación en los sistemas de correa plana, excepto que utilizamos un coeficiente de fricción “mejorado” que toma en cuenta el aumento de las fuerzas normales y de fricción posibles debido a la ranura.
\[ T_{2_{max}} = T_1 \ e ^{\mu_{s \ (enh)} \beta} , \,\, \text{ where} \]
\[ \mu_{s \ (enh)} = \frac{\mu_s}{ \sin \left( \frac{\alpha}{2} \right)} \]
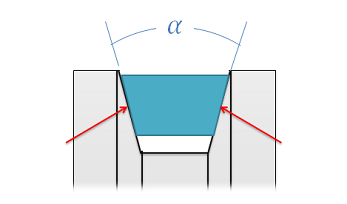
Como podemos ver en la ecuación anterior, los lados más pronunciados de la ranura (lo que resultaría en un ángulo más pequeño\(\alpha\)) dan como resultado una mayor diferencia de potencial en las fuerzas de tensión. La compensación con los lados más pronunciados, sin embargo, es que la correa se acuña en la ranura y requerirá fuerza para desencajarse de la ranura a medida que sale de la polea. Esto provocará pérdidas que disminuyen la eficiencia del sistema accionado por correa. Si se requieren diferencias de tensión muy altas, los sistemas accionados por cadena ofrecen una alternativa que suele ser más eficiente.
Transmisión de par y potencia en sistemas accionados por correa
En los sistemas accionados por correa suele haber una polea de entrada y una o más poleas de salida. Para determinar el par máximo o potencia que puede ser transmitido por la correa, necesitaremos considerar cada una de las poleas de forma independiente, entendiendo que el deslizamiento que ocurre en la entrada o en la salida resultará en una falla de la transmisión de potencia.
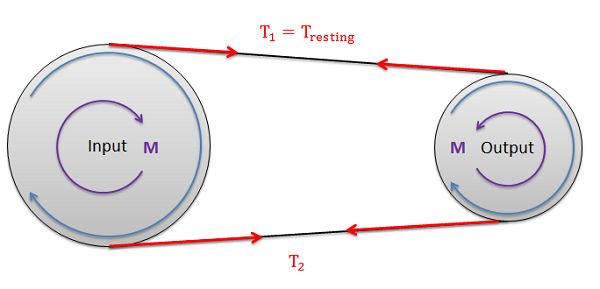
El primer paso para determinar el par máximo o potencia que se puede transmitir en la transmisión por correa es determinar el valor máximo posible para\(T_2\) antes de que se produzca el deslizamiento en la polea de entrada o de salida (nuevamente, el deslizamiento en cualquiera de las dos ubicaciones no puede ocurrir). Para comenzar a menudo se nos dará la “tensión de reposo”. Esta es la tensión en la correa cuando todo está estacionario y antes de que se transfiera la energía. En ocasiones las máquinas tendrán ajustes para aumentar o disminuir la tensión de reposo al aumentar o disminuir ligeramente la distancia entre las poleas. Si encendemos la máquina y aumentamos el par de carga a la salida, la tensión en un lado de las poleas permanecerá constante ya que la tensión en reposo mientras que la tensión en el otro lado aumentará. Dado que la tensión en reposo es constante y siempre es la menor de las dos tensiones, será la\(T_1\) tensión en ecuaciones\(\PageIndex{1}\) y\(\PageIndex{2}\).
Aunque a menudo es prudente verificar, asumiendo que las poleas están hechas del mismo material (y por lo tanto tienen los mismos coeficientes de fricción), a menudo se supone que la correa primero se deslizará en la más pequeña de las dos poleas en un sistema de correa de entrada única y salida única. Esto se debe a que la polea más pequeña tendrá el ángulo de contacto más pequeño\((\beta)\), mientras que todos los demás valores permanecen iguales.
Una vez que tenemos el valor máximo para\(T_2\), podemos usarlo para encontrar el par en la polea de entrada y el par en la polea de salida. Tenga en cuenta que estos dos valores no serán los mismos a menos que las poleas sean del mismo tamaño. Para encontrar el par, simplemente necesitaremos encontrar el momento neto ejercido por las dos fuerzas de tensión, donde el radio de la polea es el brazo de momento.
Par máximo de entrada antes de resbalar:\[ M_{max} = (T_{2_{max}} - T_1) (r_{input}) \]
Par máximo de salida antes de deslizarse:\[ M_{max} = (T_{2_{max}} - T_1) (r_{output}) \]
Para encontrar la potencia máxima que podemos transferir con el sistema de transmisión por correa, utilizaremos la definición rotacional de potencia, donde la potencia es igual al par multiplicado por la velocidad angular en radianes por segundo. A diferencia del par, la potencia en la entrada y la salida será la misma, suponiendo que no haya ineficiencias.
\[ P_{max} = (M_{input \ max}) (\omega_{input}) = (M_{output \ max}) (\omega_{output}) \]
Ejemplo\(\PageIndex{1}\)
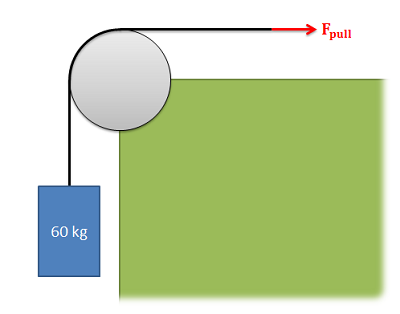
Un cable de acero que soporta una masa de 60 kg se extiende una cuarta parte del recorrido alrededor de un cilindro de acero y es soportado por una fuerza de tracción como se muestra en el diagrama a continuación. El coeficiente estático de fricción entre el cable y el cilindro de acero es 0.3.
- ¿Cuál es la fuerza mínima de tracción requerida para levantar la masa?
- ¿Cuál es la fuerza mínima de tracción requerida para evitar que la masa caiga?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/SXtKkoF4xtc.
Ejemplo\(\PageIndex{2}\)
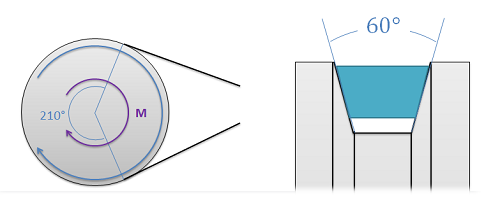
Una polea de correa en V como se muestra a continuación se utiliza para transmitir un par. Si el diámetro de la polea inferior es de 5 pulgadas, la tensión de reposo en la correa es de 20 lbs y el coeficiente de fricción entre el material de la correa y la polea es 0.4, ¿cuál es el par máximo que la polea puede ejercer antes de deslizarse?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/RLZxKEJVLeo.
Ejemplo\(\PageIndex{3}\)
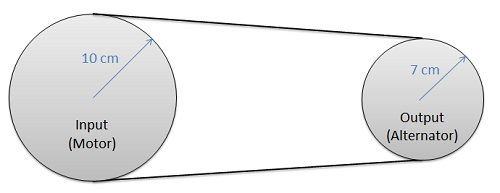
Se está utilizando una correa plana para transferir energía de un motor a un alternador como se muestra en el diagrama a continuación. El coeficiente de fricción entre el material de la correa y la polea es 0.5. Si requerimos una potencia de 100 Watts (Nm/s) mientras la entrada gira a una velocidad de 1000 rpm y la salida gira a una velocidad de 1428.6 rpm, ¿cuál es la tensión de reposo requerida en la correa? (Asumir ángulos de contacto de aproximadamente 180 grados)
- Solución
-
Video\(\PageIndex{4}\): Solución trabajada a problema de ejemplo\(\PageIndex{3}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/K7PhVhXgqUQ.