
7.5: Movimiento bidimensional con coordenadas polares
- Page ID
- 83945

El movimiento bidimensional (también llamado movimiento plano) es cualquier movimiento en el que los objetos que se analizan permanecen en un solo plano. Al analizar dicho movimiento, primero debemos decidir el tipo de sistema de coordenadas que deseamos utilizar. Las opciones más comunes en ingeniería son los sistemas de coordenadas rectangulares, los sistemas de coordenadas normal-tangenciales y los sistemas de coordenadas polares. Cualquier movimiento plano puede describirse potencialmente con cualquiera de los tres sistemas, aunque cada elección tiene ventajas y desventajas potenciales.
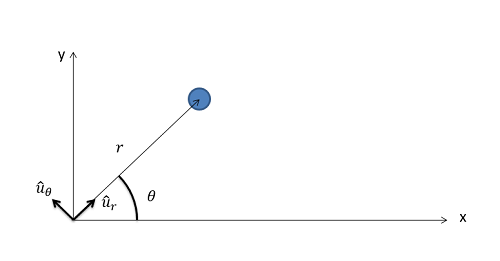
El sistema de coordenadas polares utiliza una distancia\((r)\) y un ángulo\((\theta)\) para ubicar una partícula en el espacio. El punto de origen será un punto fijo en el espacio, pero el\(r\) eje -eje del sistema de coordenadas girará para que siempre apunte hacia el cuerpo en el sistema. La variable también\(r\) se utiliza para indicar la distancia desde el punto de origen hasta la partícula. El eje theta será entonces 90 grados en sentido antihorario desde el\(r\) eje -con la variable\(\theta\) que se utilizará para mostrar el ángulo entre el\(r\) eje y algún eje fijo que no gira. El siguiente diagrama muestra una partícula con un sistema de coordenadas polares.
Los sistemas de coordenadas polares funcionan mejor en sistemas donde un cuerpo está siendo rastreado a través de una distancia y un ángulo, como un sistema de radar que rastrea un avión. En casos como este, los datos brutos de este en forma de ángulo y distancia serían medidas directas de\(\theta\) y\(r\) respectivamente. Los sistemas de coordenadas polares también servirán como base para el movimiento prolongado del cuerpo, donde los motores y actuadores pueden controlar directamente cosas como\(r\) y\(\theta\).
La forma en que se define el sistema de coordenadas, el\(r\) eje -siempre apuntará desde el punto de origen hasta el cuerpo. La distancia desde el origen hasta el punto se define como\(r\) sin componente de la posición que está en la\(\theta\) dirección.
\[ \text{Position:} \quad \, r_{p/o}(t) = r \hat{u}_r + 0 \ \hat{u}_{\theta} \]
Para encontrar la velocidad, necesitamos tomar la derivada de la función de posición a lo largo del tiempo. Dado que la distancia\(r\) puede cambiar con el tiempo así como la dirección que\(\hat{u}_r\) cambia con el tiempo para rastrear el cuerpo, debemos preocuparnos por la derivada del vector unitario así\(r\) como la derivada del vector unitario. Como hicimos con los sistemas normal-tangenciales, usaremos la regla del producto y luego sustituiremos en un valor la derivada del vector unitario.
\[ \text{Velocity:} \quad \, v(t) = \dot{r} \hat{u}_r + r \dot{\hat{u}}_r = \dot{r} \hat{u}_r + r \dot{\theta} \hat{u}_{\theta} \]
Para encontrar la aceleración, necesitamos tomar la derivada de la función de velocidad. Como todos estos términos, incluidos los vectores unitarios, cambian con el tiempo, necesitaremos usar ampliamente la regla del producto. El\(\hat{u}_r\) término se dividirá en dos términos, y el\(\hat{u}_{\theta}\) término se dividirá en tres términos.
\[ \text{Acceleration:} \quad \, a(t) = \ddot{r} \hat{u}_r + \dot{r} \dot{\hat{u}_r} + \dot{r} \dot{\theta} \hat{u}_{\theta} + r \ddot{\theta} \hat{u}_{\theta} + r \dot{\theta} \dot{\hat{u}}_{\theta} \]
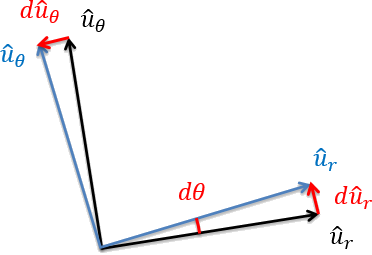
Nuevamente tendremos que sustituir en valores las derivadas de los vectores unitarios similares a antes, pero vale la pena mencionar que la derivada del\(\hat{u}_{\theta}\) vector a medida que gira en sentido contrario a las agujas del reloj está en la\(\hat{u}_r\) dirección negativa.
Después de sustituir en las derivadas de los vectores unitarios y simplificar la función, llegamos a nuestra ecuación final para la aceleración.
\ begin {align}\ text {Aceleración:}\ quad\, a (t) &=\ ddot {r}\ hat {u} _r +\ punto {r}\ punto {\ theta}\ hat {u} _ {\ theta} +\ punto {r}\ punto {\ theta}\ hat {u} _ {\ theta} + r\ ddot {\ theta}\ sombrero {u} _ {\ theta} - r\ punto {\ theta} ^2\ sombrero {u} _r\\ [5 pt] &=\ izquierda (\ ddot {r} - r\ punto {\ theta} ^2\ derecha)\ sombrero {u} _r +\ izquierda (2\ punto {r}\ punto {\ theta} + r\ ddot {\ theta}\ derecha)\ sombrero {u} _ {\ theta}\ end {align}
Aunque esta ecuación final tiene varios términos, sigue siendo solo dos componentes en forma de vector. Al igual que con el sistema de coordenadas normal-tangencial, tendremos que recordar que tendremos que dividir la ecuación de un solo vector en dos ecuaciones escalares separadas. En este caso tendremos la ecuación para los términos en la\(r\) dirección y la ecuación para los términos en la\(\theta\) dirección.
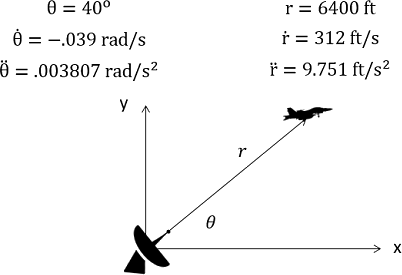
Una estación de rastreo por radar proporciona los siguientes datos sin procesar a un usuario en un momento dado. Con base en estos datos, ¿cuál es la velocidad actual y la aceleración en las\(\theta\) direcciones\(r\) y? ¿Cuál es la velocidad actual y la aceleración en las\(y\) direcciones\(x\) y?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/HP4WiIa3Nc0.
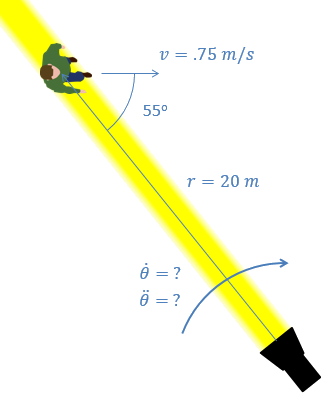
Un foco está rastreando a un actor mientras se mueve por el escenario. Si el actor se mueve con una velocidad constante como se muestra a continuación, ¿qué valores necesitamos para la velocidad angular del foco\((\dot{\theta})\) y la aceleración angular del foco para\((\ddot{\theta})\) que el foco permanezca fijo en el actor?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/jyD1seNQI14.