
7.7: Sistemas de movimiento relativo
- Page ID
- 83918

El análisis de movimiento relativo es el análisis de cuerpos donde más de un cuerpo está en movimiento y de alguna manera estamos examinando el movimiento de una partícula en movimiento en relación con otra partícula en movimiento. Un ejemplo serían los autos en una autopista. Si estás en uno de los muchos autos bajando por un lado de la autopista, tú y los otros autos tendrán velocidades en una sola dirección. Sin embargo, desde tu perspectiva dentro del auto, los autos rápidos frente a ti parecerán estar alejándose de ti y los autos lentos frente a ti parecerán estar moviéndose hacia ti. Al conocer tu velocidad, y al observar qué tan rápido se mueven los autos lejos de ti o hacia ti, podrías determinar o al menos estimar qué tan rápido van estos autos. El proceso de usar su velocidad junto con las velocidades relativas de los otros autos para encontrar la velocidad de los otros autos es el análisis de movimiento relativo.
Movimiento relativo en una dimensión:
En una sola dimensión, normalmente tendremos al menos dos partículas móviles así como algún punto de referencia fijo. Usualmente llamamos al punto de referencia fijo\(O\), y luego etiquetamos los otros puntos\(A\),\(B\), y así sucesivamente. En el diagrama, a continuación podemos ver un ejemplo de esto, con un punto de referencia fijo en\(O\), un carro de policía en\(A\), y un automóvil a exceso de velocidad en\(B\).
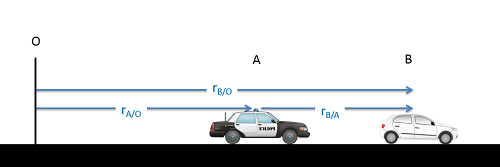
Como podemos ver en el diagrama anterior, la suma de la distancia de\(O\) a\(A\)\((r_{A/O})\) y la distancia de\(A\) a\(B\)\((r_{B/A})\) será igual a la distancia de\(O\) a\(B\)\((r_{B/O})\). Esto nos da nuestra ecuación de posición a continuación.
\[ \text{Position:} \quad \, r_{B/O} = r_{A/O} + r_{B/A} \]
Una cosa que debemos notar sobre los subíndices es que si nos mantenemos a nuestra convención de nomenclatura estándar (punto que se observa/punto desde el que estamos observando) entonces deberíamos poder ver qué puntos cancelan y cuáles quedan. En este caso, las\(A\)'s en la parte superior e inferior a la derecha cancelan, dejando solo una\(B\) en la parte superior y una\(O\) en la parte inferior. Esto coincide con el subíndice de la izquierda de la ecuación.
Además, podemos tomar la derivada de esta ecuación para relacionar velocidades, o una derivada doble para relacionar aceleraciones. Esto quiere decir que si conocemos dos de los términos en las ecuaciones siguientes, podemos resolver para el tercero.
\ begin {align}\ text {Velocidad:}\ quad &\, v_ {B/O} = v_ {A/O} + v_ {B/A}\\ [5pt]\ text {Aceleración:}\ quad &\, a_ {B/O} = a_ {A/O} + a_ {B/A}\ end {align}
Movimiento relativo en dos dimensiones:
Al igual que con una dimensión, podemos comenzar examinando un conjunto de posiciones relativas. En este caso usaremos el ejemplo de dos planos que se mueven por el cielo. Es posible que deseemos deducir la posición del plano B en un mapa, en base a nuestras observaciones del plano A. Al usar la información que tenemos sobre nuestra posición relativa a alguna ubicación establecida, junto con la posición relativa leída desde la instrumentación a bordo, deberíamos poder determinar la posición absoluta (incluyendo una \(x\)y\(y\) coordenada) para el plano B.
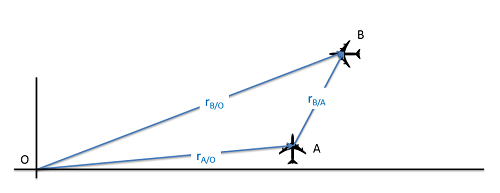
En dos dimensiones, usaremos las mismas ecuaciones que antes, excepto que esta vez usaremos vectores en lugar de valores escalares en nuestras ecuaciones.
\ begin {align}\ text {Posición:}\ quad &\,\ vec {r} _ {B/O} =\ vec {r} _ {A/O} +\ vec {r} _ {B/A}\\ [5pt]\ text {Velocidad:}\ quad &\,\ vec {v} _ _ {B/O} =\ vec {v} _ {A/O} +\ vec c {v} _ {B/A}\\ [5pt]\ text {Aceleración:}\ quad &\,\ vec {a} _ {B/O} =\ vec {a} _ {A/O} +\ vec {a} _ {B/A}\ end {align}
Para resolver estas ecuaciones, casi siempre dividiremos las ecuaciones vectoriales en un conjunto de ecuaciones de componentes. Esto nos permitirá resolver estas ecuaciones con álgebra simple. Debido a que tenemos más de una partícula, generalmente usamos sistemas de coordenadas rectangulares para esto con un conjunto universal de\(x\) y\(y\) coordenadas.
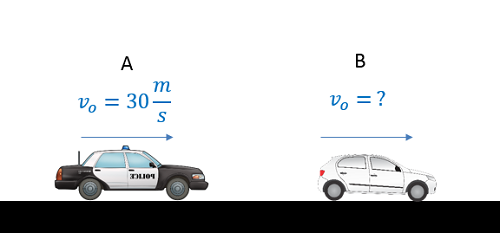
Un oficial de policía advierte que un automóvil pasa por exceso de velocidad. Si el carro de policía viaja 30 m/s y la pistola radar mide la velocidad relativa para ser de 15 m/s, ¿qué tan rápido va realmente el auto a exceso de velocidad? Si el auto de policía inmediatamente comienza a acelerar a un ritmo constante y alcanza al auto a toda velocidad después de 15 segundos, ¿cuál es la tasa de aceleración del auto policial?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/YndovN5yWfc.
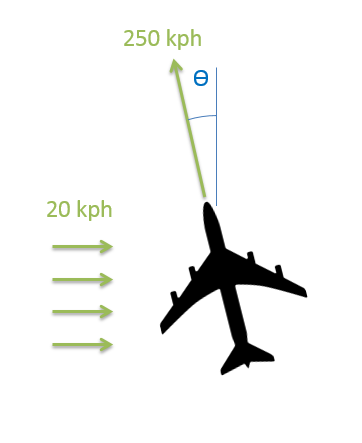
Un avión tiene una velocidad aérea de 250 kilómetros por hora (la velocidad del aire es la velocidad del avión relativa al aire) y está volando a través de un viento cruzado este con una velocidad de 20 kilómetros por hora. Si el avión quiere mantener un rumbo directo hacia el norte, ¿cuál es el ángulo que el avión debe apuntar al viento\((\theta)\)?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/ga1qcV38zYA.
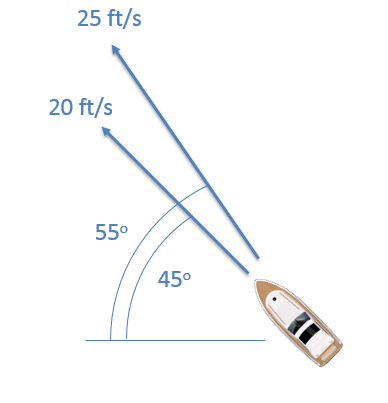
Estás en una embarcación que viaja por el agua en una zona de corrientes rápidas. Un instrumento mide tu velocidad con respecto al agua para ser de 20 pies/s con tu embarcación apuntando en un ángulo de 45 grados. El GPS, sin embargo, mide tu velocidad y dirección absolutas para ser de 25 pies/s en un ángulo de 55 grados. Con base en esta información, ¿cuál es la velocidad y dirección de la corriente de agua en esta zona?
- Solución
-
Video\(\PageIndex{4}\): Solución trabajada a problema de ejemplo\(\PageIndex{3}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/j8vnM_hrnQg.