
8.4: Ecuaciones de Movimiento en Coordenadas Polares
- Page ID
- 83788

Para terminar nuestra discusión sobre las ecuaciones del movimiento en dos dimensiones, examinaremos la Segunda ley de Newton tal como se aplica al sistema de coordenadas polares. En su forma básica, la Segunda Ley de Newton establece que la suma de las fuerzas sobre un cuerpo será igual a la masa de ese cuerpo multiplicada por la velocidad de aceleración. Para los cuerpos en movimiento, podemos escribir esta relación como la ecuación del movimiento.
\[ \sum \vec{F} = m * \vec{a} \nonumber \]
Al igual que hicimos con las coordenadas rectangulares y normal-tangenciales, dividiremos esta ecuación de vector único en dos ecuaciones escalares separadas. Esto implica identificar las\(\theta\) direcciones\(r\) y y luego usar senos y cosenos para romper las fuerzas y aceleraciones dadas en componentes en esas direcciones.
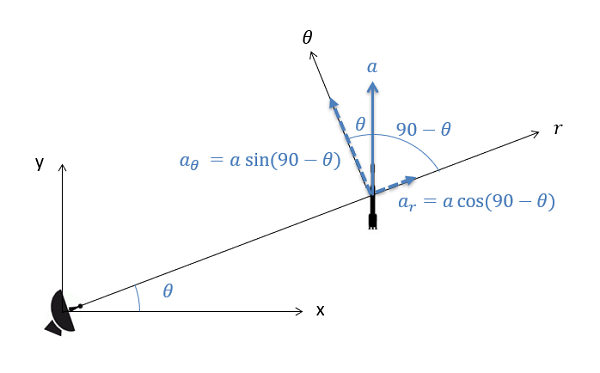
\ begin {align}\ suma f_r &= m * a_r\\ [5pt]\ suma F_ {\ theta} &= m * a_ {\ theta}\ end {align}
Al igual que con nuestros otros sistemas de coordenadas, las ecuaciones de movimiento se utilizan a menudo en conjunto con las ecuaciones cinemáticas, que relacionan posiciones, velocidades y aceleraciones como se discutió en el capítulo anterior. En particular, a menudo sustituiremos los valores conocidos a continuación por los\(\theta\) componentes\(r\) y para la aceleración.
\[ a_r = \ddot{r} - r \theta^2 \]
\[ a_{\theta} = 2 \dot{r} \dot{\theta} + r \ddot{\theta} \]
Las coordenadas polares se pueden usar en cualquier problema cinético; sin embargo, funcionan mejor con problemas donde hay un cuerpo estacionario que rastrea algún cuerpo en movimiento (como una antena parabólica de radar) o hay una partícula girando alrededor de algún punto fijo. Estas ecuaciones también volverán a entrar en juego cuando comencemos a examinar la cinemática del cuerpo rígido.
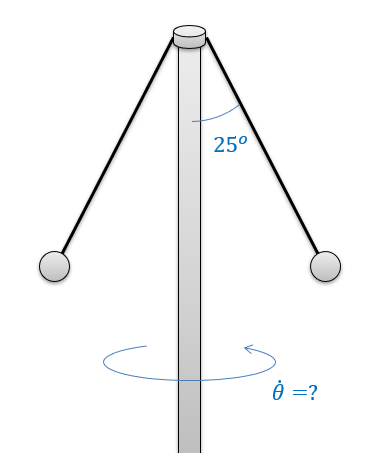
Un dispositivo consta de dos masas, cada una de 0.5 kg de masa, atadas a un eje central. Las ataduras son cada una de 0.75 metros de largo y cada correa actualmente forma un ángulo de 25 grados con el eje central. Supongamos que el eje central está girando a una velocidad constante. ¿Cuál es la velocidad a la que gira el eje? Si queremos que gire exactamente a 100 rpm, ¿cuál debería ser el ángulo de las ataduras?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/fGsoMdR1H9I.
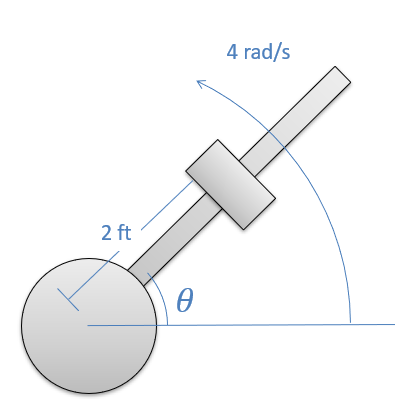
Un diseño de catapulta consiste en un peso de acero sobre una varilla sin fricción. La varilla gira a una velocidad constante de 4 radianes por segundo y cuando\(\theta\) está a 45 grados de la horizontal, el peso de 30 lb se libera de su posición a 2 pies del centro de rotación del eje. ¿Cuál es la fuerza que ejerce el eje sobre el peso en el instante anterior y en el instante posterior a su liberación? ¿Cuál es la aceleración del peso a lo largo del eje en el instante en que se libera?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/bKsi80wzLUY.