
10.5: Dispositivos de flujo constante
- Page ID
- 83964

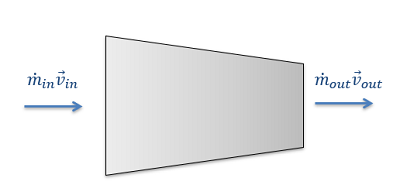
Un dispositivo de flujo constante es cualquier dispositivo que tendrá un flujo continuo de material a través de él. Algunos ejemplos de dispositivos de flujo constante incluyen tuberías, boquillas, difusores y bombas. Generalmente, el material que fluye a través del dispositivo es un gas o líquido, y si el dispositivo cambia de alguna manera la velocidad del fluido entonces ese fluido ejercerá una fuerza sobre el dispositivo de flujo constante a cambio.

Para determinar las fuerzas en juego en un dispositivo de flujo constante, comenzaremos con nuestra ecuación impulso-impulso.
\[ \vec{J} = m \vec{v}_f - m \vec{v}_i \]
Debido a que este es un proceso continuo, realmente no tiene sentido tener velocidades iniciales y finales. En cambio, tendremos velocidades de entrada y salida. Además, la masa deberá cambiarse al caudal másico (la masa que entra o sale del dispositivo por unidad de tiempo) para hacer frente a la naturaleza de flujo continuo del sistema.
Dividir nuestra ecuación inicial impulso-impulso por tiempo en ambos lados nos dará el caudal másico deseado a la derecha, mientras que el tiempo a la izquierda cancelará la componente de tiempo del impulso.
\[ \frac{\vec{F} * t}{t} = \frac{m_{out}}{t} \vec{v}_{out} - \frac{m_{in}}{t} \vec{v}_{in} \]
Simplificando esta ecuación, llegaremos a nuestra ecuación final, que relaciona la fuerza que nuestro dispositivo de flujo constante ejerce sobre el fluido con los caudales másticos y velocidades en la entrada y salida. La fuerza que el fluido ejerce sobre el dispositivo sería simplemente igual y opuesta a la fuerza inferior.
\[ \vec{F} = \dot{m}_{out} \vec{v}_{out} - \dot{m}_{in} \vec{v}_{in} \]
Una nota final es que estas ecuaciones son ecuaciones vectoriales. Si el dispositivo está cambiando la dirección del flujo de un fluido, deberá romper la fuerza y las velocidades en\(x\) y\(y\) componentes y dividir la ecuación anterior en\(x\) y\(y\) componentes.
Encontrar el caudal másico:
Si el caudal másico dentro o fuera de su dispositivo no se da directamente, es posible que deba encontrar esos valores. Primero podemos usar una identidad simple: sabemos que el caudal másico será igual a la densidad del fluido\((\rho)\) multiplicado por el caudal volumétrico. Además, el caudal volumétrico puede estar relacionado con la geometría del dispositivo, ya que será igual a la velocidad promedio del fluido en la entrada o salida multiplicado por el área de sección transversal en la entrada o salida. Armando todo esto, llegamos a la siguiente fórmula.
\[ \dot{m} = \rho \dot{V} = \rho \vec{v} A \]
Ejemplo\(\PageIndex{1}\)
Un bombero soporta una manguera como se muestra a continuación. La manguera tiene un caudal volumétrico de 60 gal/min y la boquilla reduce en diámetro de 4 cm a 2 cm. ¿Qué fuerza tendrá que ejercer el bombero, en Newtons, para mantener la manguera en su lugar?

- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/rl4A1N_BNGA.
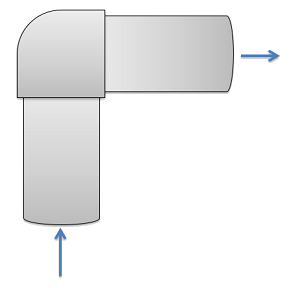
Ejemplo\(\PageIndex{2}\)
Una articulación acodada de 90 grados redirige el flujo a lo largo de una tubería de 3 cm de diámetro. Si el agua (densidad=1000 kg/m 3) está viajando por la tubería con una velocidad promedio de 5 m/s, ¿cuál es la magnitud y dirección de la fuerza que ejerce el agua sobre la articulación del codo?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/znKq2quYMWk.