
11.2: Sistemas Accionados por Banda y Engranajes
- Page ID
- 83892

Los sistemas de correa y polea, junto con los sistemas accionados por engranajes, representan las formas comunes en que los ingenieros transfieren el movimiento rotacional y el par de torsión de un eje a otro eje. Las correas ofrecen flexibilidad ya que los ejes no necesitan estar uno al lado del otro, y los engranajes se usan más comúnmente en aplicaciones de alta carga.
.JPG)

Posición, velocidad y aceleración en sistemas accionados por correa
El siguiente diagrama muestra un sistema sencillo accionado por correa. La Polea A y la Polea B tienen cada una su propio radio, y están conectadas a través de una correa que asumiremos que no se desliza con relación a las poleas. Cada polea está experimentando una rotación de eje fijo y por lo tanto seguirá esas reglas cinemáticas por separado; sin embargo, el movimiento de la correa se puede utilizar para relacionar el movimiento de las dos poleas.
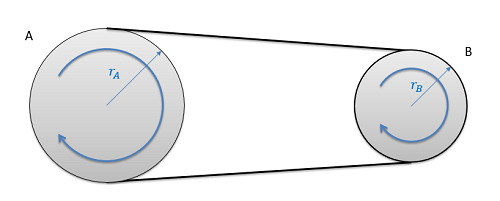
Como restricción, podemos suponer que la velocidad de la polea será uniforme a lo largo de todo el bucle en cualquier momento. Si esto no fuera cierto, el cinturón se estaría agrupando en algunos lugares y extendiéndose en otras áreas. Si la correa no se desliza, la velocidad de la correa será la misma que la velocidad del borde de cada una de las dos poleas. Estableciendo estas dos velocidades iguales entre sí y trabajando hacia atrás para relacionarlas con velocidades angulares, terminamos con la ecuación media a continuación. Tomar la integral o derivada nos permite relacionar también desplazamientos angulares o aceleraciones angulares con ecuaciones similares.
\ begin {align}\ text {Desplazamientos angulares:}\ quad &\, R_a (\ Delta\ TheTA_a) = R_b (\ Delta\ TheTA_B)\\ [5pt]\ text {Velocidades angulares:}\ quad &\, R_a\ Omega_a = R_b\ Omega_b\\ [5pt]\ text {Aceleraciones angulares:}\ &\, R_A\ Alpha_a = R_b\ Alpha_B\ end {align}
Si tenemos una serie más compleja de correas y poleas, analizaremos el sistema paso a paso. Esto incluirá poleas conectadas por correas como las que teníamos arriba, así como poleas conectadas a través de un eje como se muestra con las poleas B y C en el diagrama a continuación.
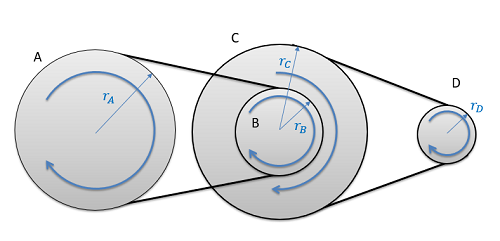
Con poleas en el mismo eje, los desplazamientos angulares, las velocidades angulares y las aceleraciones angulares serán todos iguales.
\[ \Delta \theta_B = \Delta \theta_C \ ; \quad \omega_B = \omega_B \ ; \quad \alpha_B = \alpha_C \]
Si conocemos el desplazamiento angular, la velocidad angular o la aceleración angular de la polea A, podríamos encontrar el desplazamiento angular, la velocidad angular o la aceleración angular de la polea D moviendo una interacción a la vez (encontrando el movimiento de la polea B, luego C, luego D).
Posición, velocidad y aceleración en sistemas de engranajes:
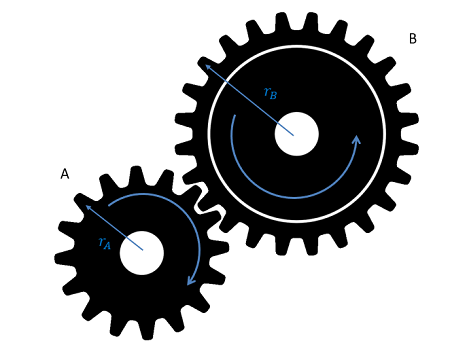
El siguiente diagrama muestra un sistema de engranajes simple. El engranaje A y el engranaje B tienen cada uno su propio radio y están interactuando en su punto de contacto. Cada engranaje está experimentando una rotación de eje fijo y, por lo tanto, seguirá esas reglas cinemáticas por separado; sin embargo, el movimiento de los dientes en el punto de contacto puede usarse para relacionar el movimiento de un engranaje con el siguiente.
Como restricción, podemos suponer que la velocidad de los dientes en el punto de contacto será la misma. Si esto no fuera cierto, los dientes de un engranaje estarían pasando por los dientes del otro engranaje. Estableciendo estas dos velocidades iguales entre sí y trabajando hacia atrás para relacionar las velocidades angulares, encontramos la segunda ecuación a continuación. Tomar la integral o derivada nos permite relacionar también los desplazamientos angulares o aceleraciones angulares con ecuaciones similares.
\ begin {align}\ text {Desplazamientos angulares:}\ quad &\, R_a (\ Delta\ TheTA_a) = - R_b (\ Delta\ TheTA_B)\\ [5pt]\ text {Velocidades angulares:}\ quad &\, R_a\ Omega_a = -R_b\ Omega_b\\ [5pt]\ text {Aceleraciones angulares:}\ quad &\, R_A\ Alpha_a = - R_b\ Alpha_B\ end {align}
Notarás que las ecuaciones anteriores coinciden con las ecuaciones que teníamos para los sistemas accionados por correa, excepto el signo menos en el lado derecho de cada ecuación. Esto se debe a que los engranajes engranados giran en direcciones opuestas (si un engranaje gira en el sentido de las agujas del reloj, el otro girará en sentido antihorario), mientras que las poleas en los sistemas accionados por correa siempre giran en la misma dirección.
También similar a los sistemas accionados por correa, podemos tener trenes de engranajes compuestos con tres o más engranajes similares a la figura a continuación. En estos escenarios, también probablemente tendremos engranajes que están conectados a través de un eje como los engranajes azules y amarillos que se muestran a continuación. En tales situaciones, los engranajes del mismo eje tendrán desplazamientos angulares, velocidades angulares y aceleraciones angulares coincidentes. Al igual que con los sistemas de transmisión por correa, simplemente necesita tomar el tren de engranajes paso a paso, aplicando el conjunto correcto de ecuaciones para que coincida con cada paso en la interacción.
Un concepto que se usa comúnmente en trenes de engranajes que no se usa comúnmente en sistemas de transmisión por correa es el concepto de la relación de transmisión. Para cualquier tren de engranajes, la relación de transmisión se define como la velocidad angular de la entrada dividida por la velocidad angular de la salida. Con base en las ecuaciones anteriores, también podemos probar que la relación de desplazamientos angulares o aceleraciones angulares será igual de manera similar a la relación de transmisión. Sin embargo, la relación de transmisión siempre se define como un número positivo, por lo que aún necesitará usar la intuición para determinar la dirección de salida.
\[ \text{Gear Ratio} = \frac{\omega_{input}}{\omega_{output}} = \frac{\Delta \theta_{input}}{\Delta \theta_{output}} = \frac{\alpha_{input}}{\alpha_{output}} \]
En un sistema simple de dos engranajes, la relación de transmisión será igual al radio del engranaje de salida dividido por el radio del engranaje de entrada, o el número de dientes en el engranaje de salida dividido por el número de dientes en el engranaje de entrada (ya que el número de dientes será directamente proporcional al radio). En trenes de engranajes compuestos este simple cálculo que se da a continuación no funcionará, pero si se le da la relación de transmisión para un tren de engranajes compuesto, aún puede aplicar las ecuaciones anteriores.
\[ \text{Gear Ratio} = \frac{\omega_{input}}{\omega_{output}} = \frac{r_{output}}{r_{input}} = \frac{N_{output}}{N_{input}} \]
Ejemplo\(\PageIndex{1}\)
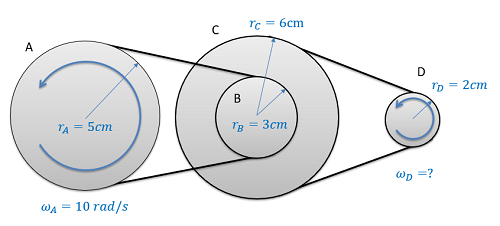
Si la polea de entrada A como se muestra a continuación gira a una velocidad de 10 rad/s, ¿cuál es la velocidad de la polea de salida en D? ¿Cuántas rotaciones pasa D en el tiempo que tarda A en hacer una rotación completa?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/IxhXp7eBx3k.
Ejemplo\(\PageIndex{2}\)
Un automóvil se mueve a 40 pies/s con ruedas de 18 pulgadas de diámetro. ¿Cuál es la velocidad angular de las ruedas en el auto? Si el automóvil está en tercera marcha con una relación de transmisión de 4. 89:1, ¿cuál es la velocidad angular del motor en rotaciones por minuto? (Pista: el motor es la entrada al tren de engranajes y las ruedas son la salida del tren de engranajes).

- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/-2Gta-grqoI.