
11.3: Análisis de Movimiento Absoluto
- Page ID
- 83901

El análisis de movimiento absoluto es un método utilizado para analizar cuerpos sometidos a movimiento plano general. El movimiento plano general es el movimiento donde los cuerpos pueden trasladarse y rotar al mismo tiempo. Además del análisis de movimiento absoluto, la alternativa es el análisis de movimiento relativo. Cualquiera de los dos métodos se puede utilizar para cualquier problema general de movimiento plano, pero un método puede ser significativamente más fácil de aplicar para una situación dada.
El análisis de movimiento absoluto requerirá cálculo, y generalmente es más rápido para problemas simples y problemas donde solo se requieren las velocidades (y no aceleraciones). El análisis de movimiento relativo no requerirá cálculo, pero sí requiere el uso de múltiples sistemas de coordenadas; generalmente es más fácil de usar para problemas más complejos y problemas donde se están analizando velocidades y aceleraciones.
Utilizando Análisis de Movimiento Absoluto:
Para iniciar nuestra discusión sobre el análisis de movimiento absoluto, vamos a imaginar un brazo robótico simple como el de abajo. En este brazo, tenemos dos secciones de brazo de longitud fija con motores que provocan rotaciones en la articulación A y la junta B.
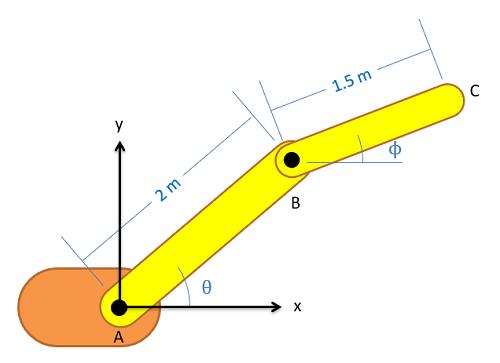
El primer paso en el análisis de movimiento absoluto es llegar a un conjunto de ecuaciones que describan la posición de algún punto de interés. En este caso estaremos mirando la posición del efector final del brazo en el punto C, y escribiremos una ecuación para la\(x\) posición y la\(y\) posición de este punto con respecto al punto de origen fijo en A. En estas ecuaciones, cualquier cosa que sea una constante (como la longitud del piezas de brazo) se pueden poner como un número, pero cualquier cosa que cambie, como ángulos\(\theta\) y\(\phi\), tendrá que permanecer como variables en estas ecuaciones aunque se conozcan en este momento. Usando los valores en el diagrama, terminaríamos con las siguientes dos ecuaciones de posición.
\ begin {align} x\ text {-posición:}\ quad &\, x_C = 2\ cos (\ theta) + 1.5\ cos (\ phi)\\ [5pt] y\ text {-posición:}\ quad &\, y_C = 2\ sin (\ theta) + 1.5\ sin (\ phi)\ end {align}
Para encontrar la velocidad del punto C en las\(y\) direcciones\(x\) y, simplemente necesitamos tomar las derivadas de las ecuaciones de posición. Las ecuaciones de velocidad para nuestro brazo robótico están abajo.
\ begin {align} x\ text {-velocidad:}\ quad &\, v_ {x\ C} = -2\ sin (\ theta)\ punto {\ theta} - 1.5\ sin (\ phi)\ punto {\ phi}\\ [5pt] y\ text {-velocidad:}\ quad &\, v_ {y\ C} = 2\ cos (\ theta)\ punto {\ theta} + 1.5\ cos (\ phi)\ punto {\ phi}\ end {align}
Para encontrar la aceleración del punto C en las\(y\) direcciones\(x\) y, simplemente necesitamos tomar las derivadas de las ecuaciones de velocidad. Las ecuaciones de aceleración para nuestro brazo robótico en las\(y\) direcciones\(x\) y se muestran a continuación.
\ begin {align} x\ text {aceleración:}\ quad &\, a_ {x\ C} = -2\ cos (\ theta)\ punto {\ theta} ^2 - 2\ sin (\ theta)\ ddot {\ theta} - 1.5\ cos (\ phi)\ punto {\ phi} ^2 - 1.5\ sin (\ phi)\ ddot {phi}\\ [5pt] y\ texto {aceleración:}\ quad &\, a_ {y\ C} = -2\ sin (\ theta)\ punto {\ theta} ^2 + 2\ cos (\ theta)\\ ddot {\ theta} - 1.5\ sin (\ phi)\\ punto {\ phi} ^2 + 1.5\ cos (\ phi)\ ddot {\ phi}\ end {align}
Una vez que tenemos las ecuaciones de velocidad y aceleración, podemos comenzar a resolver cualquier incógnitas. Si hemos conocido velocidades angulares y aceleraciones (\(\dot{\theta}\),\(\ddot{\theta}\)\(\dot{\phi}\), y\(\ddot{\phi}\)) podemos conectarlas para encontrar los vectores de velocidad y aceleración para el efector final. En otros casos, podemos conocer el movimiento deseado del efector final (\(v_{xC}\),\(v_{yC}\)\(a_{xC}\), y\(a_{yC}\)) y tendremos que enchufar esos valores en las ecuaciones para resolver incógnitas como\(\dot{\theta}\) y así sucesivamente.
Ejemplo\(\PageIndex{1}\)
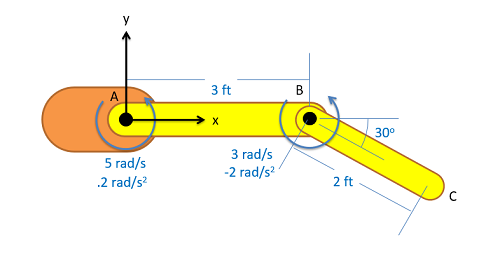
El brazo robótico que se muestra a continuación tiene una base naranja fija en A y miembros de longitud fija AB y BC. Los motores en A y B permiten el movimiento de rotación en las juntas. Con base en las velocidades angulares y aceleraciones mostradas en cada articulación, determinar la velocidad y la aceleración del efector final en C.
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/ZBj17t8mhZc.
Ejemplo\(\PageIndex{2}\)
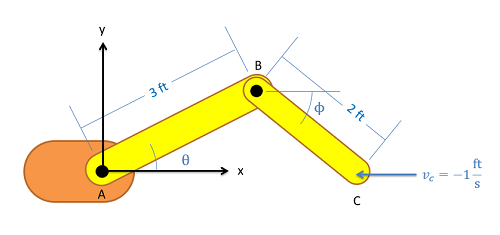
El brazo robótico del problema anterior se encuentra en la configuración que se muestra a continuación. Supongamos que actualmente\(\theta\) es de 30 grados y que el punto C actualmente se encuentra a lo largo del\(x\) eje. Si queremos que el efector final en C viaje 1 pies/s en la\(x\) dirección negativa, ¿cuáles deberían ser las velocidades angulares en las juntas A y B?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/O5mtTTpK1RQ.
Ejemplo\(\PageIndex{3}\)
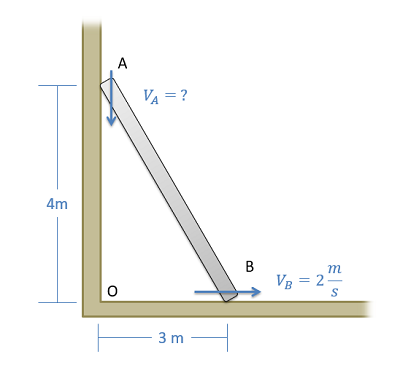
Una escalera está apoyada contra una pared como se muestra a continuación. Si la base de la escalera se desliza a una velocidad de 2 m/s, ¿cuál es la velocidad de la parte superior de la escalera?
- Solución
-
Video\(\PageIndex{4}\): Solución trabajada a problema de ejemplo\(\PageIndex{3}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/fOfEaFUiDZI.
Ejemplo\(\PageIndex{4}\)
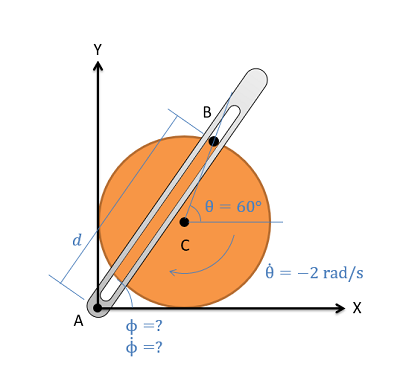
El mecanismo biela-balancín como se muestra a continuación consiste en una manivela con un radio de 0.5 metros que gira alrededor de su centro fijo en C, a una velocidad constante de 2 rad/s en sentido horario. El balancín AB se fija en su base en A y se conecta al punto B a lo largo del borde de la manivela. El pasador en el punto B puede deslizarse a lo largo de una ranura sin fricción en AB. En el estado actual, ¿cuál es la velocidad angular del balancín AB?
- Solución
-
Video\(\PageIndex{5}\): Solución trabajada a problema de ejemplo\(\PageIndex{4}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/DydbOzigdpU.