
12.2: Rotación de eje fijo
- Page ID
- 83959

Con cuerpos rígidos, tenemos que examinar momentos y al menos la posibilidad de rotación junto con las fuerzas y aceleraciones que examinamos con partículas. Algunos cuerpos rígidos se traducirán pero no girarán (sistemas de traslación), algunos girarán pero no se traducirán (rotación de eje fijo) y otros girarán y se traducirán (movimiento plano general). Aquí examinaremos la rotación del cuerpo rígido alrededor de un eje fijo. Como su nombre sugeriría, la rotación de eje fijo es el análisis de cualquier cuerpo rígido que gire alrededor de algún eje que no se mueva. Muchos dispositivos rotan alrededor de su centro, aunque los objetos no necesitan rotar alrededor de su punto central para que este análisis funcione.

De nuevo comenzaremos con la Segunda Ley de Newton. Dado que se trata de un sistema de cuerpo rígido, incluimos tanto la versión traslacional como la rotacional.
\[ \sum \vec{F} = m * \vec{a} \]
\[ \sum \vec{M} = I * \vec{\alpha} \]
Al establecer diagramas de cuerpo libres, determinar las ecuaciones de movimiento usando la Segunda Ley de Newton, y resolviendo las incógnitas, podemos encontrar fuerzas basadas en las aceleraciones o viceversa.
Rotación balanceada
Si el centro de masa del cuerpo está en el eje de rotación, lo que se conoce como rotación equilibrada, entonces la aceleración en ese punto será igual a cero. La máquina de cabeceo anterior es un ejemplo de una rotación equilibrada, y la mayoría de los sistemas de eje fijo se construirán intencionalmente para equilibrarse. Siendo cero la aceleración del centro de masa, la suma de las fuerzas tanto en la\(x\)\(y\) dirección como debe ser igual a cero.
\[ \sum F_x = 0 \]
\[ \sum F_y = 0 \]
Además de las ecuaciones de fuerza, también podremos usar las ecuaciones de momento para resolver incógnitas. En simple movimiento plano, esta será una ecuación de un solo momento que tomamos alrededor del eje de rotación o centro de masa (recuerde que son el mismo punto en rotación equilibrada).
\[ \sum M_O = I_O * \alpha \]
Rotación desequilibrada
Cuando el centro de masa no se encuentra en el eje de rotación, el centro de masa se acelerará y por lo tanto se ejercerán fuerzas para provocar esa aceleración. En sistemas perfectamente anclados estas serán fuerzas ejercidas por los cojinetes, aunque estas fuerzas a menudo se pueden sentir como vibraciones en sistemas reales.

Las ecuaciones cinemáticas discutidas en el capítulo anterior pueden ser utilizadas para determinar la aceleración de un punto en un cuerpo giratorio, siendo ese punto el centro de masa en este caso. Después de determinar esas aceleraciones, se pueden poner en vigor ecuaciones, muy probablemente usando las\(\theta\) direcciones\(r\) y.
\[ \sum F_r = m a_r \]
\[ \sum F_{\theta} = m a_{\theta} \]
Tenga en cuenta que a medida que el cuerpo gira, la dirección de la aceleración y la dirección de las fuerzas cambian. También tenga en cuenta que cuanto más lejos esté el centro de masa del eje de rotación, mayor será la masa. Cuanto mayor sea la velocidad angular, mayores serán estas fuerzas.
Para complementar las ecuaciones de fuerza, podemos usar una ecuación de momento sobre el eje de rotación o el centro de masa, ya que estos ya no son el mismo punto. Cualquiera que sea el que se elija, solo asegúrese de ser consistente en tomar los momentos y el momento masivo de inercia sobre el mismo punto.
\[ \sum M_O = I_O * \alpha \quad\quad \text{or} \quad\quad \sum M_G = I_G * \alpha \]
Puede encontrar más información sobre cómo calcular el momento de inercia de masa para un cuerpo en el Apéndice 2.
Ejemplo\(\PageIndex{1}\)
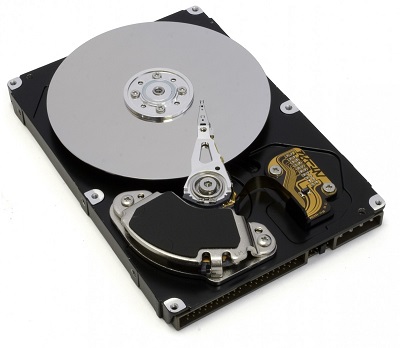
Un plato de disco duro de 8 cm de diámetro acelera a una velocidad constante de 150 rad/s 2. Si el disco duro pesa 0.05 kg distribuidos uniformemente y aproximamos el disco duro como un disco circular plano, ¿qué momento necesita ejercer el motor para acelerar la unidad a este ritmo?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/grJ8WYsGitw.
Ejemplo\(\PageIndex{2}\)
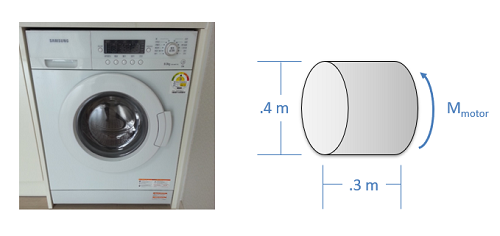
El tambor en una lavadora puede aproximarse como un cilindro de 0.4 metros de diámetro y 0.3 metros de altura con una masa uniformemente distribuida de 35 kilogramos cuando está lleno. Si deseamos lograr una aceleración de 15 rad/s 2, ¿qué par debe ejercer el motor en el centro del tambor?
- Solución
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/7G7HnwsyLXk.