
12.4: Movimiento Planar General Multicuerpo
- Page ID
- 83971

En los casos en que múltiples cuerpos rígidos conectados están experimentando algún tipo de movimiento, podemos extender nuestro análisis del movimiento plano general a esta situación de múltiples cuerpos. En estos casos, que llamaremos problemas de cinética multicuerpo, analizaremos cada cuerpo de forma independiente como lo hicimos para el movimiento plano general, pero también tendremos que prestar atención a los pares de la Tercera Ley de Newton. Cada cuerpo tendrá fuerzas ejercidas sobre él por los cuerpos circundantes, y ejercerá fuerzas iguales y opuestas de regreso a través de esas mismas conexiones.
Para analizar un sistema multi-cuerpo, comenzaremos dibujando un diagrama de cuerpo libre de cada cuerpo en movimiento. Asegúrese de identificar el centro de masa, así como identificar todas las fuerzas conocidas y desconocidas, y los momentos conocidos y desconocidos que actúan sobre el cuerpo. Al dibujar fuerzas en los puntos de conexión, asegúrese de hacer que las fuerzas sean iguales y opuestas en el cuerpo conectado para satisfacer la Tercera Ley de Newton. También a veces es útil etiquetar cualquier dimensión clave, así como usar líneas discontinuas para identificar cualquier aceleración conocida o aceleración angular. A menudo, se necesitará resolver un problema cinemático utilizando análisis de movimiento absoluto o análisis de movimiento relativo para determinar las aceleraciones de los centros de masa y las aceleraciones angulares para cada cuerpo. Asegúrate de que todas estas aceleraciones sean con respecto al suelo.
A continuación pasamos a identificar las ecuaciones de movimiento para cada cuerpo en el sistema. En dos dimensiones, usaremos las mismas tres ecuaciones que usamos para el movimiento plano general. Asegúrese de encontrar las aceleraciones de todos los centros de masas, encontrar todos los momentos sobre el centro de masa, y tomar los momentos masivos de inercia alrededor del centro de masa de cada cuerpo.
\[ \sum F_x = m * a_x \]
\[ \sum F_y = m * a_y \]
\[ \sum M_G = I_G * \alpha \]
Conectando las fuerzas, momentos y aceleraciones conocidas en las ecuaciones anteriores podemos resolver hasta tres incógnitas por cuerpo. Si existen más de tres incógnitas en cualquier conjunto de ecuaciones, deberá comenzar con un cuerpo adyacente. Una vez que se determinan fuerzas desconocidas en un cuerpo, pueden llegar a ser conocidas en el cuerpo conectado, reduciendo el número de incógnitas para resolver.
Ejemplo\(\PageIndex{1}\)
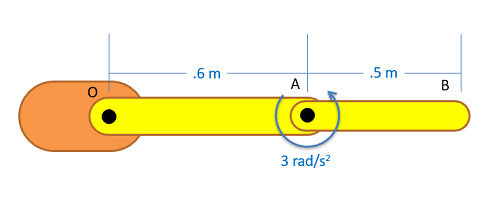
Un brazo robótico tiene dos secciones (OA y AB), con la sección OA que tiene una masa de 10 kg y la sección AB que tiene una masa de 7 kg. Trate cada sección como una varilla esbelta. Si deseamos acelerar el miembro AB desde un punto muerto a razón de 3 rad/s² y mantener la sección izquierda estacionaria, ¿qué momentos debemos ejercer en las articulaciones O y A?
- Solución
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Majid Chatsaz. Fuente de YouTube: https://youtu.be/zR_uhVM1uH0.