
14.2: Colisiones de Superficie de Cuerpo Rígido
- Page ID
- 83895

En los casos en que un cuerpo rígido en movimiento impacta sobre una superficie sólida e inamovible, el impacto resultante puede parecer caótico. Sin embargo, todavía podemos usar las ideas de impulso e impulso para predecir este comportamiento de impacto.
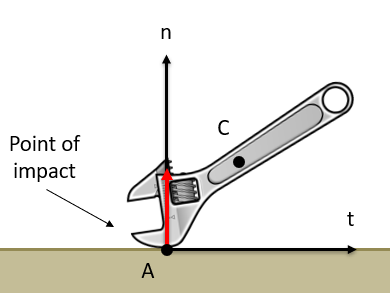
Al igual que con las partículas, un primer paso importante para resolver problemas donde un cuerpo rígido impacta una superficie es identificar las direcciones normal y tangencial. La dirección normal será perpendicular a la superficie impactada, mientras que la dirección tangencial será paralela a la superficie impactada. También es importante para el impacto corporal rígido identificar tanto el centro de masa para el cuerpo como el punto de impacto entre el cuerpo y la superficie.
Para predecir las velocidades lineales después del impacto en las\(t\) direcciones\(n\) y, así como la velocidad angular después del impacto (un total de tres incógnitas), necesitaremos tres ecuaciones. Estas ecuaciones vendrán en forma de la conservación del momento en la\(t\) dirección, así como dos ecuaciones basadas en el coeficiente de restitución para la velocidad en la\(n\) dirección y la velocidad angular después del impacto.
Para el impulso, notaremos que las fuerzas normales durante el impacto siempre estarán en la dirección normal. Suponiendo fuerzas de fricción insignificantes (que estarían en la dirección tangencial), no tendremos ningún cambio en el momento en la dirección tangencial y por lo tanto ningún cambio en la velocidad en la dirección tangencial para el centro de masa del cuerpo. Esto nos da la primera ecuación que podemos usar.
\[ v_{t,C,f} = v_{t,C,i} \]
A continuación, examinar el coeficiente de restitución nos dará otra ecuación. Específicamente, el coeficiente de restitución relaciona las velocidades antes y después de la colisión en la dirección normal en el punto de impacto.
\[ \epsilon = - \frac{v_{n,A,f}}{v_{n,A,f}} \]
Si la colisión es elástica también conservaríamos la energía cinética del cuerpo, dándonos nuestra tercera ecuación. Más generalmente, sin embargo, el coeficiente de restitución puede ser utilizado para cuantificar la cantidad de energía perdida en la colisión, con colisiones más elásticas conservando un mayor porcentaje de energía cinética y ecuaciones más inelásticas conservando menos energía cinética. La siguiente ecuación se puede utilizar para cualquier colisión elástica o semielástica con una superficie. Usando la tercera ecuación a continuación, simplemente establecemos\(\epsilon\) igual a uno para colisiones elásticas o igual al coeficiente de restitución para colisiones semielásticas.
\[ \epsilon^2 = \frac{KE_f}{KE_i} \]
Entre las tres ecuaciones anteriores y cualesquiera que sean las relaciones cinemáticas relevantes que sean necesarias, deberíamos poder resolver hasta tres incógnitas. Esto nos permite predecir completamente las velocidades después de un impacto, asumiendo que conocemos las velocidades previas al impacto y el coeficiente de restitución por el impacto mismo.
Practica\(\PageIndex{1}\)
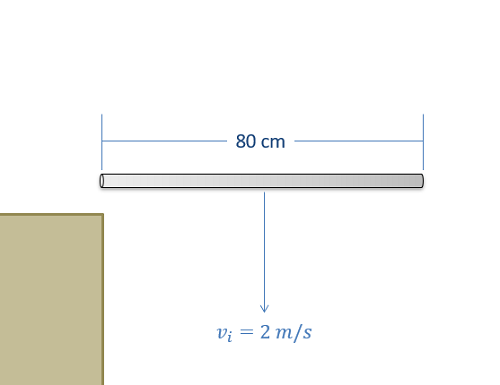
Una barra metálica de 80 centímetros de largo con una masa de 1 kilogramo, que cae a 2 metros por segundo, golpea el borde de una tabla como se muestra a continuación. Suponiendo un coeficiente de restitución de 0.9, ¿cuál es la velocidad esperada y la velocidad angular de la barra después del impacto?
- Solución (aún no disponible)
-
Aún no está disponible.