
15.3: Vibraciones libres amortiguadas por fricción (Coulomb)
- Page ID
- 84064

La fricción también puede proporcionar amortiguación de vibraciones. En este caso, sin embargo, la amortiguación no es proporcional a la magnitud de la velocidad. Sólo depende de la dirección de la velocidad.
Recordamos de la sección sobre fricción seca que la fuerza de fricción en el deslizamiento depende únicamente del coeficiente de fricción cinética,\(\mu_k\), y la fuerza normal,\(F_N\).
\[ F_f = \mu_k F_N \]
La ecuación anterior no incluye la velocidad. Sabemos que la fricción cinética actúa para oponerse al movimiento, sin embargo, por lo que una expresión más completa sería:
\[F_f = - \text{sgn} (\dot{x}) \mu_k F_N , \]
donde\(sgn\) está la función “signo”, una función que captura el signo (dirección) de la velocidad. La ecuación anterior indica entonces que la dirección de fricción siempre es opuesta a la dirección de la velocidad, pero la magnitud de la velocidad no hace diferencia en la magnitud de la fricción.
La ecuación de movimiento del sistema se convierte en:
\[ m \ddot{x} + \mu m g \ \text{sgn} (\dot{x}) + kx = 0, \]
y la solución a esta ecuación de movimiento es:
\[ x(t) = \left( x_0 - \frac{(2n-1) \mu m g}{k} \right) \cos (\omega_n t) + \frac{\mu m g}{k} (-1)^{n+1} . \]
Si trazamos la respuesta, podemos ver que existen varias diferencias con respecto a un sistema con amortiguación viscosa.

Algunas diferencias en comparación con la amortiguación viscosa incluyen:
- El sistema oscila a la frecuencia natural del sistema, no a una frecuencia natural amortiguada.
- Las curvas delimitadoras son lineales, no exponenciales.
- El sistema no vuelve a cero. Esto se debe a que la magnitud de la fuerza de fricción no disminuye a medida que se reduce la amplitud del sistema, y en algún momento la fuerza del resorte ya no es capaz de superar la fricción estática que experimenta el sistema cuando cambia de dirección (\(v=0\)).
Comparación con el sistema viscoso de humedad insuficiente
Si consideramos nuestro sencillo sistema lineal de masa-resorte, la magnitud de\(F_f\) no cambia con la velocidad, a diferencia de la amortiguación viscosa. Si trazamos ambos tipos de amortiguamiento para un mismo sistema, obtendríamos lo siguiente:
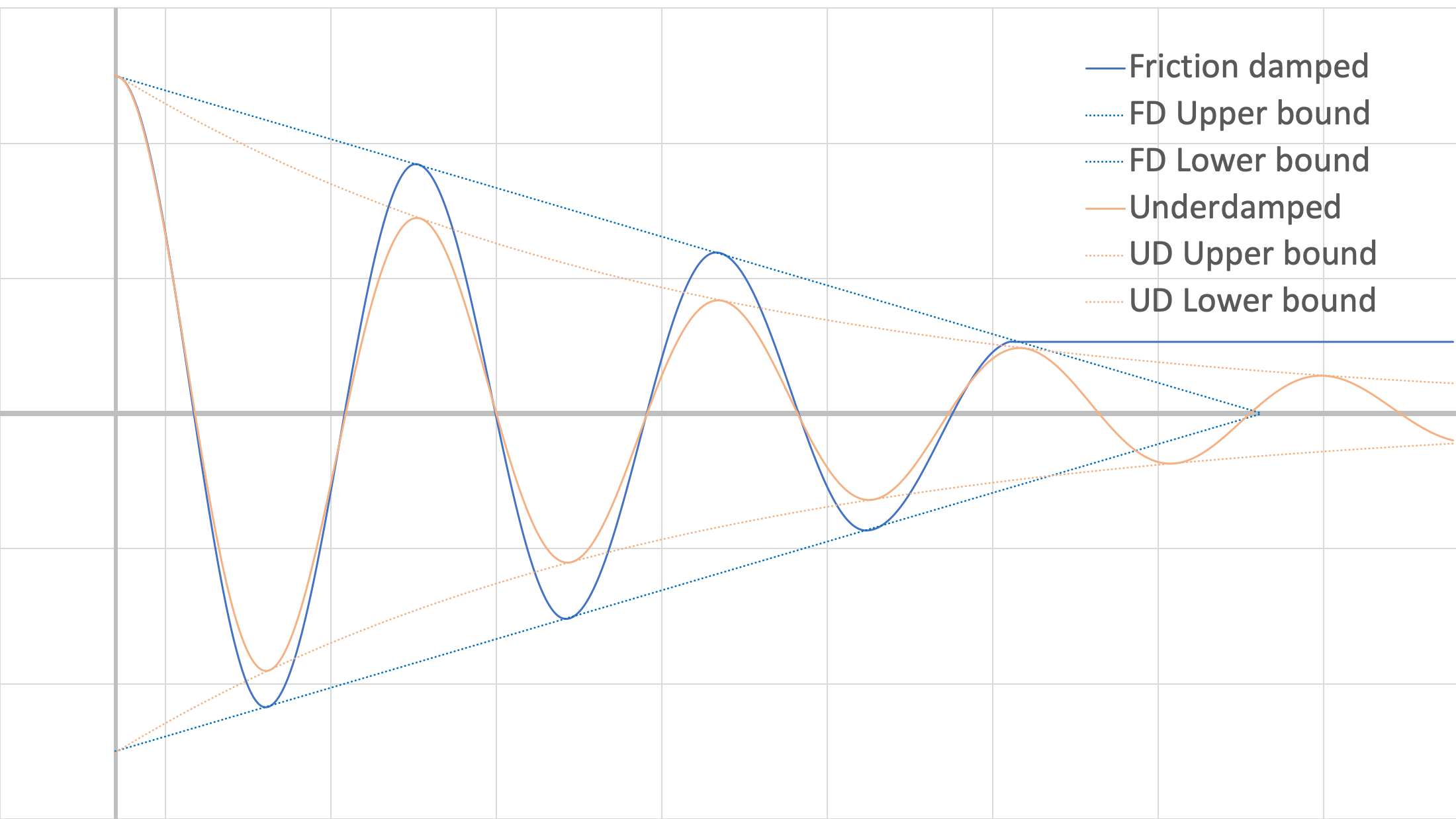
Tenga en cuenta que la amortiguación viscosa tiene más reducción en amplitud antes (a pesar de la amortiguación relativamente ligera), pero continúa oscilando más allá del punto en que el sistema amortiguado por fricción se ha detenido (los valores relativos específicos dependen de los valores de constante de amortiguación y coeficientes de fricción). También tenga en cuenta que dado que el amortiguamiento viscoso es relativamente ligero, la diferencia de periodo entre las dos parcelas es bastante pequeña en este ejemplo.