
15.4: Vibraciones Forzadas Armónicas No A
- Page ID
- 84058

A menudo, los sistemas mecánicos no están experimentando vibraciones libres, sino que están sujetos a alguna fuerza aplicada que hace que el sistema vibre. En esta sección, consideraremos solo fuerzas armónicas (es decir, sinusoidales y cosenales), pero cualquier fuerza cambiante puede producir vibración.
Cuando consideramos el diagrama de cuerpo libre del sistema, ahora tenemos una fuerza adicional para agregar: es decir, la excitación armónica externa.
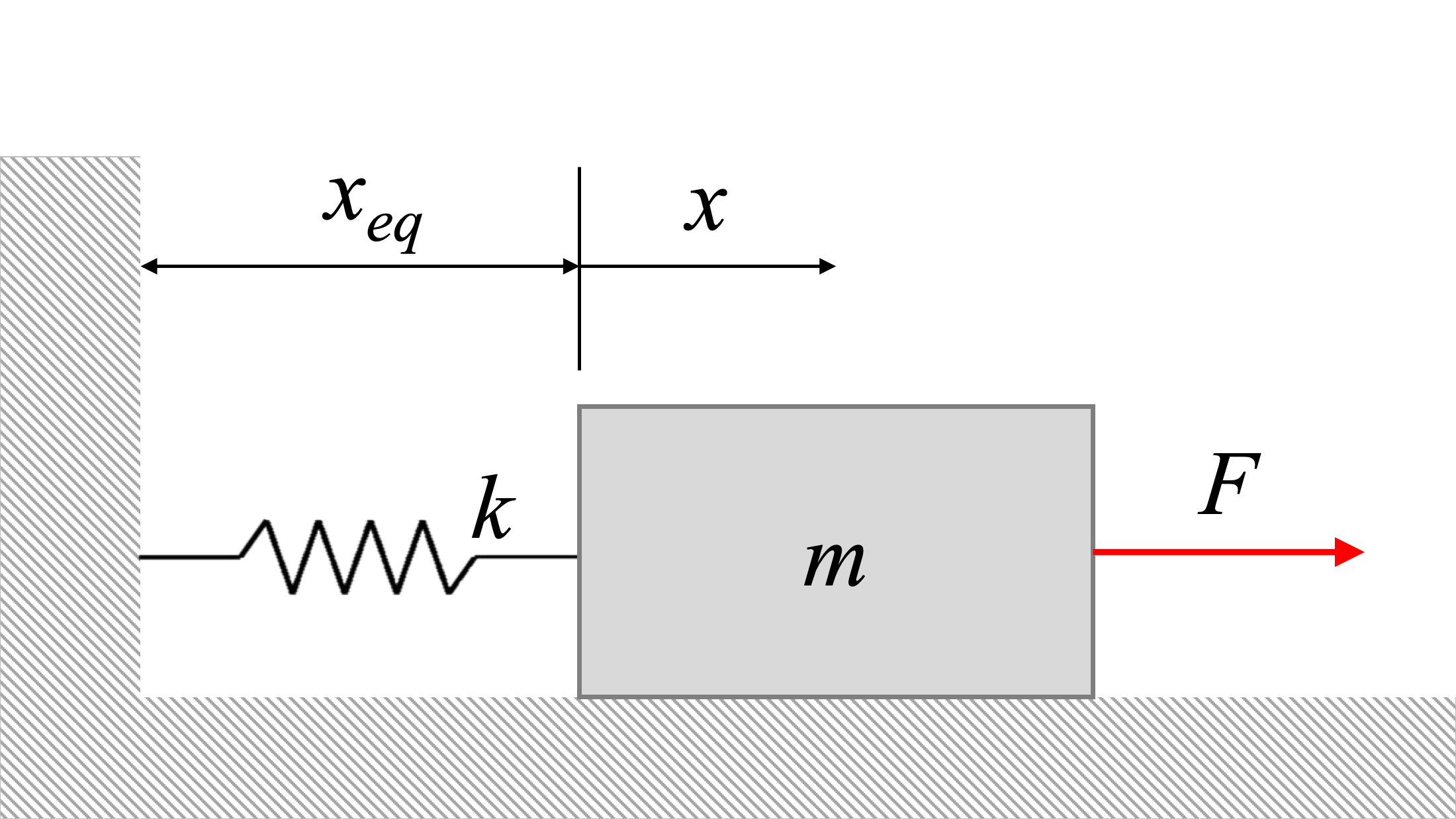
La ecuación de movimiento del sistema anterior será:
\[ m \ddot{x} + kx = F, \]
donde\(F\) es una fuerza de la forma:
\[ F = F_0 \sin (\omega_0 t). \]
Esta ecuación de movimiento para el sistema se puede reescribir en forma estándar:
\[ \ddot{x} + \frac{k}{m} x = \frac{F_0}{m} \sin (\omega_0 t). \]
La solución a este sistema consiste en la superposición de dos soluciones: una solución particular,\(x_p\) (relacionada con la función de forzamiento), y una solución complementaria,\(x_c\) (que es la solución al sistema sin forzar).
Como vimos anteriormente, la solución complementaria es la solución al sistema libre sin amortiguar:\[x_c = C \sin (\omega_n t + \phi). \]
Podemos obtener la solución particular asumiendo una solución de la forma:\[x_p = D \sin (\omega_0 t), \]
donde\(\omega_0\) es la frecuencia de la función de forzamiento armónico. Diferenciamos esta forma de la solución, y luego subdividimos en la ecuación de movimiento anterior:
\[ \ddot{x}_p = - \omega_0^2 D \sin (\omega_0 t) \]
\[ - m \omega_0^2 D \sin (\omega_0 t) + k D \sin (\omega_0 t) = F_0 \sin (\omega_0 t) \]
Después de resolver for\(D\), podemos usarlo para encontrar la solución particular,\(x_p\):
\[ D = \frac{ \dfrac{F_0}{k}}{1 - \left( \dfrac{\omega_0}{\omega_n} \right) ^2} \]
\[ x_p = \frac{ \dfrac{F_0}{k}}{1 - \left( \dfrac{\omega_0}{\omega_n} \right) ^2} \ \sin (\omega_0 t). \]
Por lo tanto, la solución general para un sistema forzado y sin amortiguar es:
\[ x_G (t) = \frac{ \dfrac{F_0}{k}}{1- \left( \dfrac{\omega_0}{\omega_n} \right) ^2} \ \sin (\omega_0 t) + C \sin (\omega_n t + \phi) \]
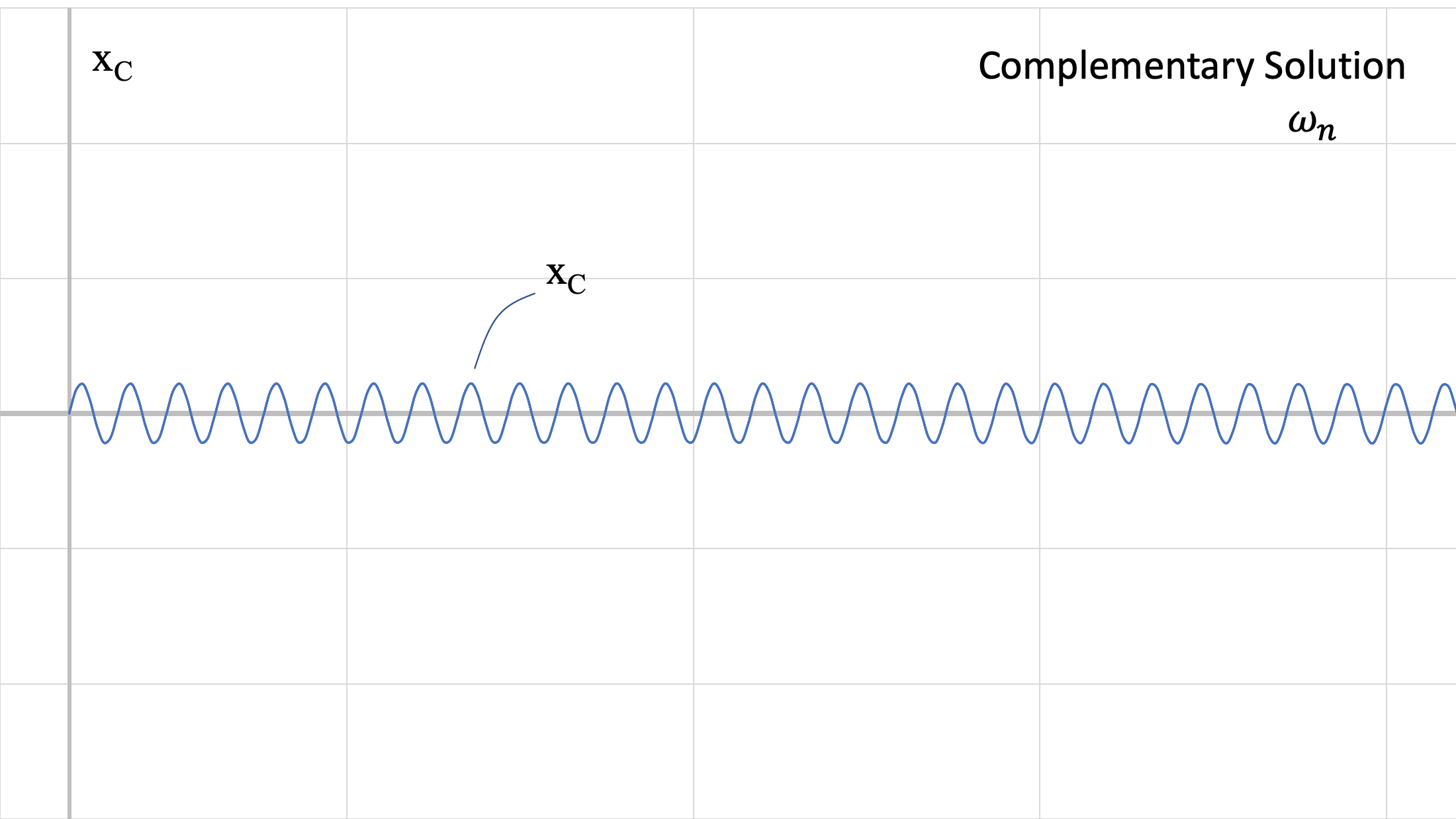
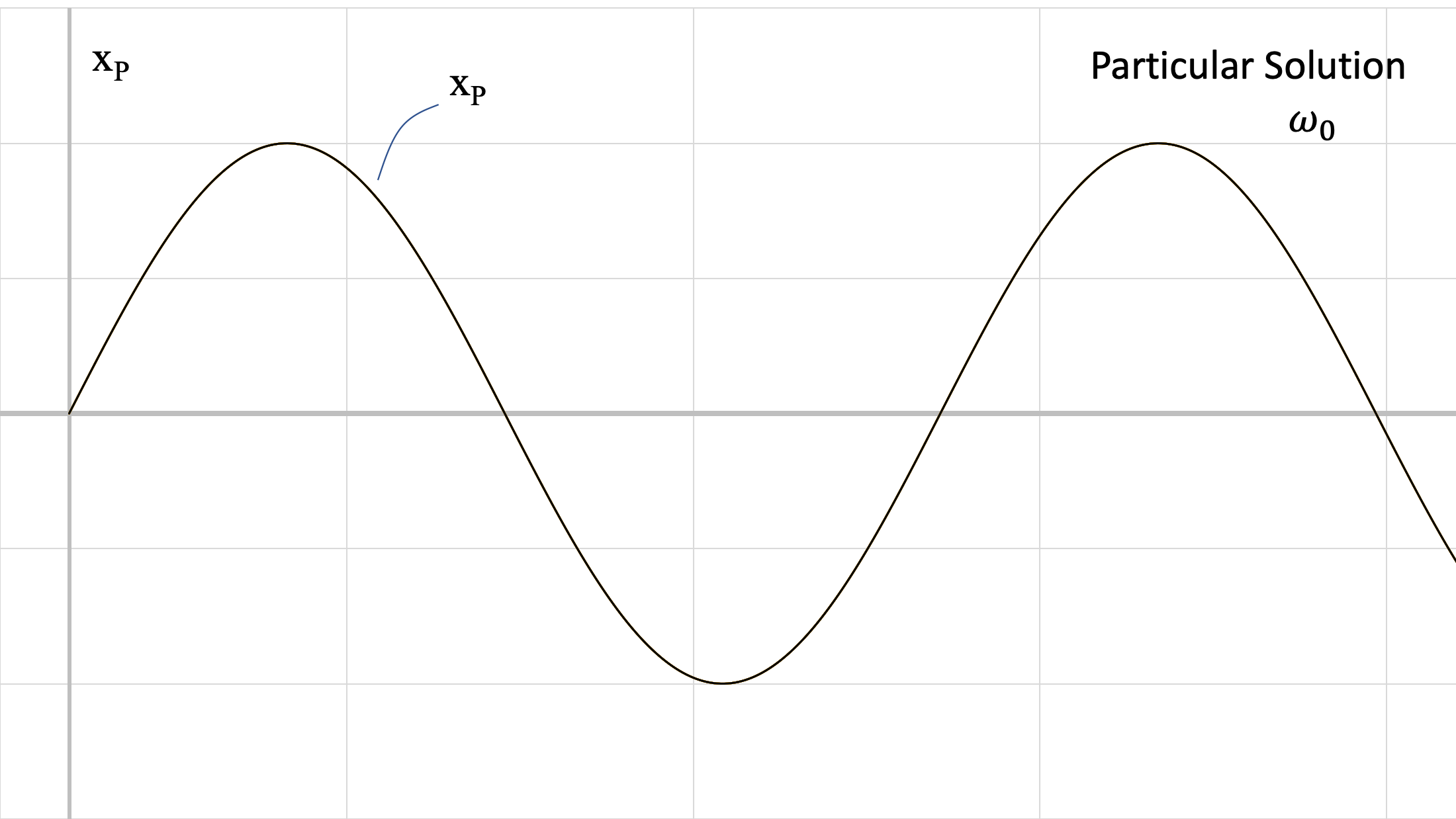
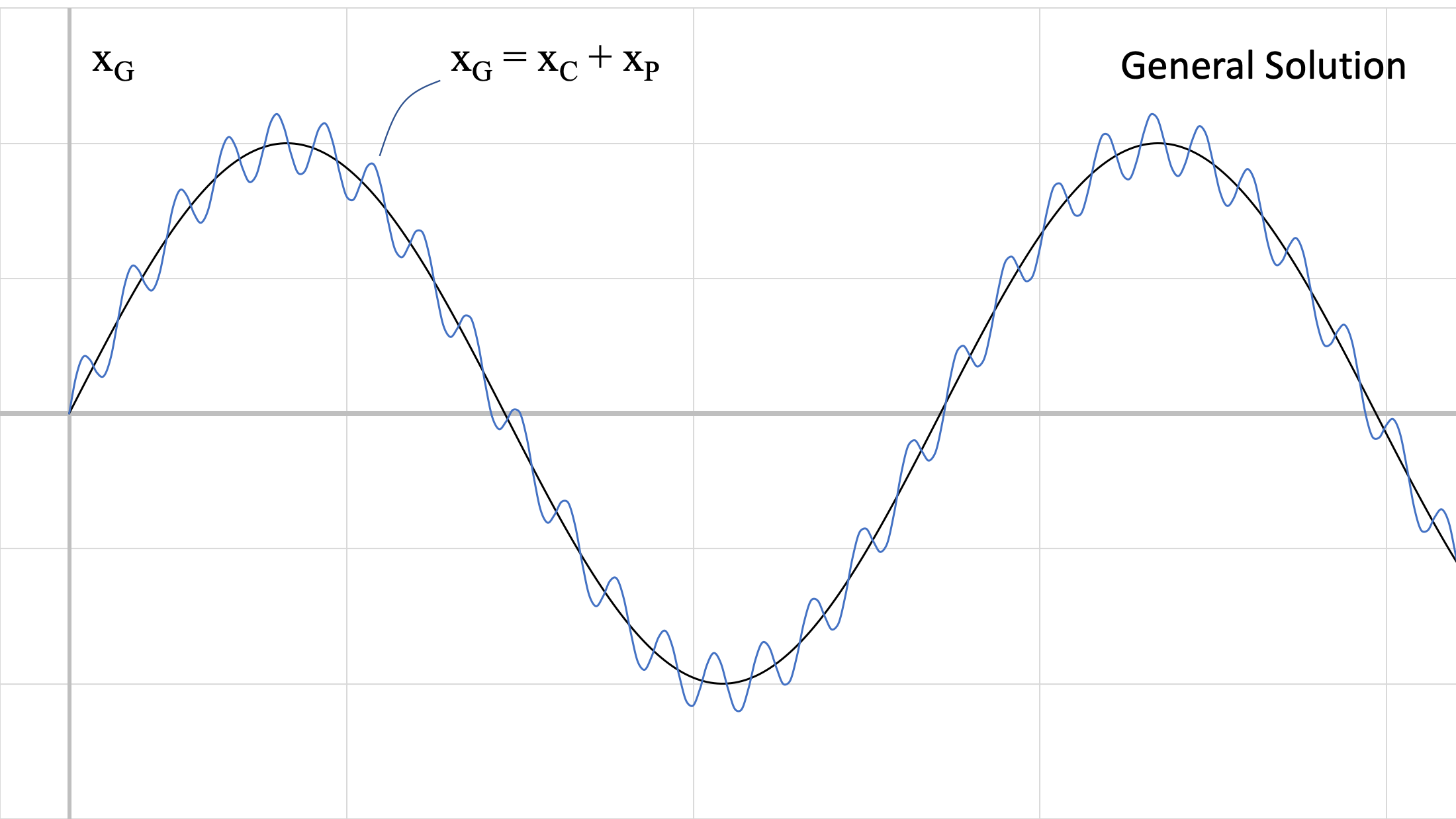
Las cifras anteriores muestran las dos respuestas a diferentes frecuencias. Recordemos que el valor de\(\omega_n\) proviene de las características físicas del sistema (\(m, \, k\)) y\(\omega_0\) proviene de la fuerza que se aplica al sistema. Estas respuestas se suman, para lograr la respuesta azul (solución general) en la Figura\(\PageIndex{4}\) anterior.
Respuesta en estado estacionario:
En realidad, esta respuesta superpuesta no dura mucho. Cada sistema real tiene alguna amortiguación, y la respuesta natural del sistema se amortiguará. Mientras se aplique la fuerza armónica externa, sin embargo, la respuesta a la misma permanecerá. Al evaluar la respuesta del sistema a una función de forzamiento armónico, normalmente consideraremos la respuesta de estado estacionario, cuando la respuesta natural se ha amortiguado y la respuesta a la función de forzamiento permanece.
Amplitud de vibración forzada
La amplitud de la vibración forzada en estado estacionario depende de la relación entre la frecuencia forzada y la frecuencia natural. A medida que\(\omega_0\) se acerca\(\omega_n\) (la relación se acerca a 1), la magnitud\(D\) se vuelve muy grande. Podemos definir un factor de aumento:
\[ MF = \dfrac{ \dfrac{ \dfrac{F_0}{k}}{1 - \left( \dfrac{\omega_0}{\omega_n} \right) ^2}} {\dfrac{F_0}{k}} = \dfrac{1}{1 - \left( \dfrac{\omega_0}{\omega_n} \right) ^2} \]
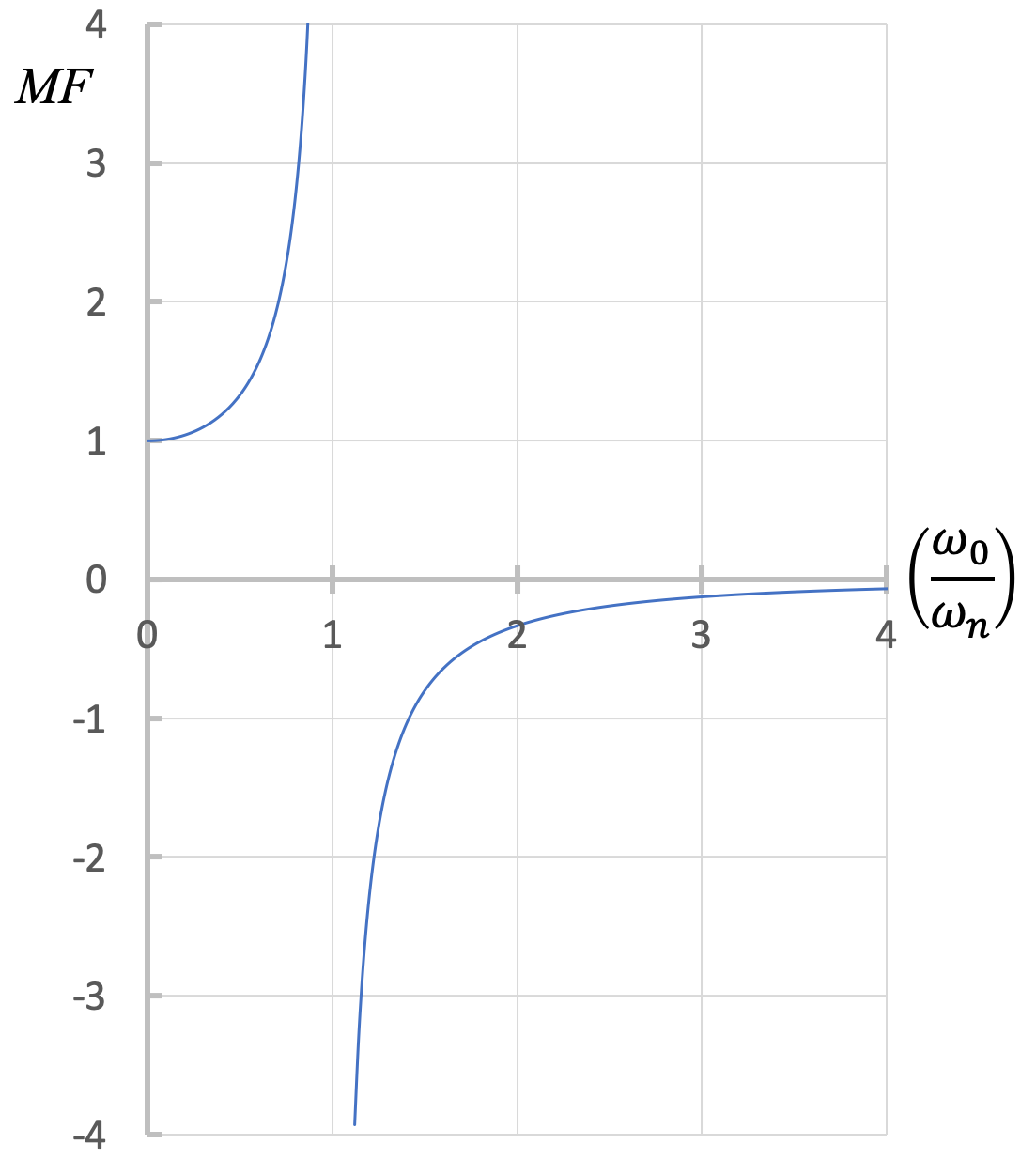
A partir de la figura anterior, podemos discutir diversos casos:
- \(\bf{\omega_0 = \omega_n}\): Se produce resonancia. Esto da como resultado vibraciones de muy gran amplitud, y se asocia con altas tensiones y fallas en el sistema.
- \(\bf{\omega_0 \sim 0, MF \sim 1}\): La función de forzamiento es casi estática, dejando esencialmente la desviación estática y la vibración natural limitada.
- \(\bf{\omega_0 < \omega_n}\): La ampliación es positiva y mayor que 1, es decir, las vibraciones están en fase (cuando la fuerza actúa hacia la izquierda, el sistema se desplaza hacia la izquierda) y la amplitud de la vibración es mayor que la deflexión estática.
- \(\bf{\omega_0 > \omega_n}\): La ampliación es negativa y el valor absoluto suele ser menor que 1, lo que significa que la vibración está desfasada con el movimiento de la función de forzamiento (cuando la fuerza actúa hacia la izquierda, el sistema se desplaza hacia la derecha) y la amplitud de la vibración es menor que la desviación estática.
- \(\bf{\omega_0 >> \omega_n}\): La fuerza está cambiando de dirección demasiado rápido para que el movimiento del bloque responda.
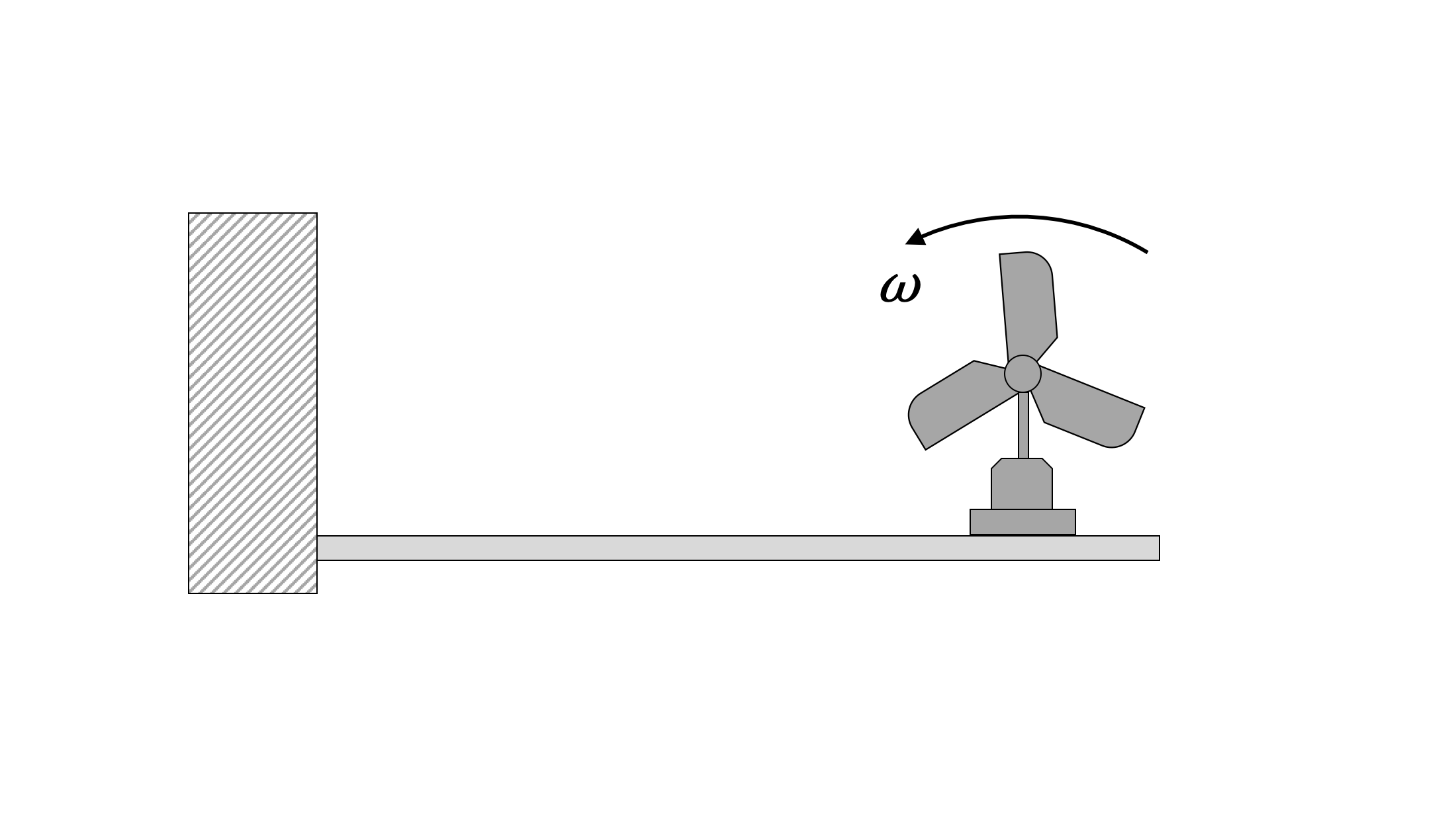
Desequilibrio giratorio:
Una causa común de vibración forzada armónica en los sistemas mecánicos es el desequilibrio giratorio. Esto ocurre cuando el eje de rotación no pasa por el centro de masa, lo que significa que el centro de masa experimenta cierta aceleración en lugar de permanecer estacionario. Esto provoca una fuerza sobre el eje que cambia de dirección a medida que gira el centro de masa. Podemos representar esto como una pequeña masa,\(m\), girando alrededor del eje de rotación a cierta distancia, llamada excentricidad,\(e\). La frecuencia angular forzada\(\omega_0\), en este caso es la frecuencia angular del sistema giratorio.
Un ventilador de 10 kg se fija a una viga ligera. El peso estático del ventilador desvía la viga 20 mm. Si la cuchilla está diseñada para girar a\(\omega\) = 15 rad/s, y la cuchilla está montada descentrada (equivalente a una masa de 1.5 kg a 50 mm del eje de rotación), determine la amplitud de vibración en estado estacionario.
- Solución:
-
Video\(\PageIndex{1}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\). Fuente de YouTube: https://youtu.be/k0vJLxaAjtw.
Estás diseñando un ventilador elegante que usa solo una pala. Aproximar esa hoja como una placa estrecha con una densidad por unidad de longitud de 20 g/cm. El peso base del resto del dispositivo (a excepción de la cuchilla) es de 4 kg, y todo está montado en una viga liviana. Si la constante de resorte de la viga es\(k\) = 1000 N/m, encuentre la longitud de la pala que causará resonancia si el ventilador está diseñado para girar a\(\omega\) = 15 rad/s.

- Solución:
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\). Fuente de YouTube: https://youtu.be/tV4ETwwOyX0.