
17.6: Momentos masivos de inercia a través de la integración
- Page ID
- 84019

El momento de inercia de masa representa la resistencia de un cuerpo a las aceleraciones angulares alrededor de un eje, así como la masa representa la resistencia de un cuerpo a las aceleraciones lineales. Esto se representa en una ecuación con la versión rotacional de la Segunda Ley de Newton.
\[ F = ma \]
\[ M = I \alpha \]
Al igual que con los momentos de inercia de área, el momento de inercia de masa se puede calcular a través de integrales de momento o mediante el método de partes compuestas y el teorema del eje paralelo. Esta página solo discutirá el método de integración, ya que el método de las piezas compuestas se discute en una página separada.
El Momento Masivo de Inercia y Aceleraciones Angulares
El momento de inercia de masa es un momento integral, específicamente el segundo momento de masa polar integral. Para ver por qué esto relaciona momentos y aceleraciones angulares, comenzamos por examinar una masa puntual en el extremo de un palo sin masa como se muestra a continuación. Imagina que queremos rotar el palo sobre el extremo izquierdo aplicando un momento ahí. Queremos relacionar el momento ejercido con la aceleración angular del palo sobre este punto.
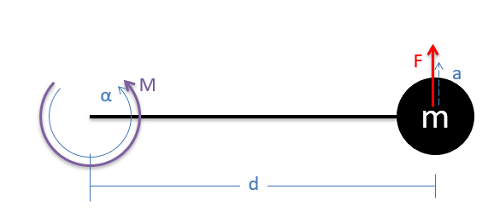
Para relacionar el momento y la aceleración angular, necesitamos comenzar con la forma tradicional de la Segunda Ley de Newton, afirmando que la fuerza ejercida sobre la masa puntual por el palo será igual a la masa multiplicada por la aceleración de la masa puntual (\(F = m*a\)). En este caso el momento estará relacionado con la fuerza en que la fuerza ejercida sobre la masa por la longitud del palo (\(d\)) es igual al momento. También podemos relacionar la aceleración lineal de la masa con su contraparte rotacional en que la aceleración lineal es la aceleración angular multiplicada por la longitud de la varilla (\(d\)). Si tomamos estas dos sustituciones y las ponemos en la\(F = m*a\) ecuación original, podemos terminar con una ecuación que relaciona el momento y la aceleración angular para nuestro escenario. Una versión simplificada de esta nueva relación establece que el momento será igual a la masa por la distancia al cuadrado por la aceleración angular. Este término masa-tiempo-distancia-cuadrado (que relaciona el momento y la aceleración angular) forma la base del momento masivo de inercia.
\[ F = m * a \]
\[ M = F * d \quad\quad\quad a = d * \alpha \]
\[ M = (m * d^2) * \alpha \]
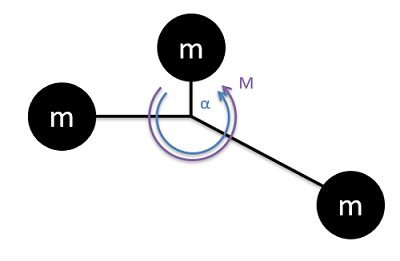
Llevando nuestra situación un paso más allá, si tuviéramos que tener múltiples masas todas conectadas a un punto central, el momento y la aceleración angular estarían relacionados por la suma de todos los términos de masa por distancia al cuadrado.
\[ M = \sum (m * d^2) * \alpha \]
Dando el paso final, los cuerpos rígidos con masa distribuida sobre un volumen son como un número infinito de pequeñas masas alrededor de un eje de rotación. En lugar de los palos sin masa que sostienen todo en su lugar, la masa simplemente se sostiene en su lugar por el material que la rodea. Para relacionar el momento y la aceleración angular en este caso, utilizamos la integración para sumar el número infinito de pequeños términos masa-tiempo-distancia-cuadrado.
\[ M = \int_m (dm * d^2) * \alpha \]
Esta integral de momento que se puede calcular para cualquier forma dada, llamada momento de inercia de masa, relaciona el momento y la aceleración angular para el cuerpo alrededor de un eje de rotación establecido.
\[ I = \int_m (dm * d^2) \]
Cálculo del Momento de Inercia Masivo vía Integración
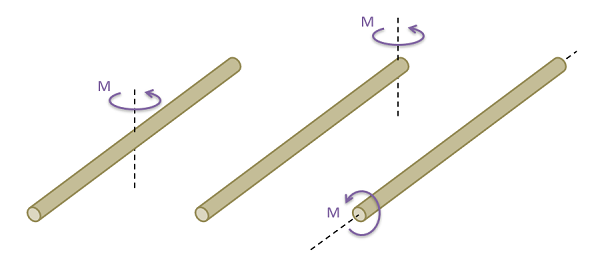
El primer paso para calcular el momento de inercia de masa es determinar el eje de rotación que va a utilizar. A diferencia de la masa, el momento de inercia de masa depende del punto y eje sobre el que estamos rotando. Podemos demostrar esto fácilmente con algo así como una escoba, donde dependiendo de la posición y la dirección del eje sobre el que estemos girando, la escoba puede ser más o menos difícil de rotar.
Después de elegir el eje de rotación, es útil dibujar la forma con el eje de rotación incluido. Esta es una integral polar, por lo que estaremos tomando la masa integral que irradia hacia afuera desde este eje de rotación.
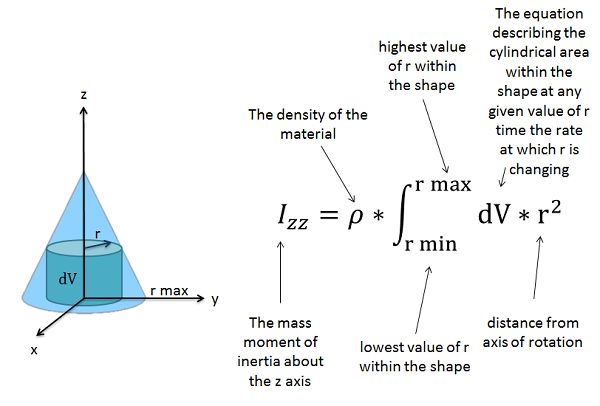
También, nos estamos integrando sobre la masa, y la masa en cualquier punto dado será la densidad por el volumen. Si el objeto que estamos examinando tiene una densidad uniforme, como suele ser el caso, podemos tirar de esa densidad constante fuera de la integral, dejando sólo una integral del volumen. La densidad rara vez se da en estos casos, pero si puedes determinar la masa general y el volumen general puedes usar eso también. Si ponemos todo esto en la ecuación original que teníamos arriba, terminamos con lo siguiente.
\[ I = \rho * \int_{r_{min}}^{r_{max}} (dV * r^2) = \frac{m}{V} * \int_{r_{min}}^{r_{max}} (dV * r^2) \]
Para la integral polar, necesitamos definir\(dV\) en términos de un radio (\(r\)) que se mueve hacia afuera desde el eje de rotación. La velocidad de cambio del volumen (\(dV\)) será el área de superficie cilíndrica en un radio dado multiplicado por la velocidad a la que ese radio está aumentando (\(dr\)). La altura, el radio y los agujeros en esta superficie cilíndrica pueden estar cambiando por lo que este\(dV\) término puede llegar a ser bastante complejo, pero técnicamente podríamos encontrar esto para la función matemática para cualquier forma. Una vez que tenemos la\(dV\) función en términos de\(r\), multiplicamos esa función por\(r^2\) y evaluaremos la integral.
Ejemplo\(\PageIndex{1}\)
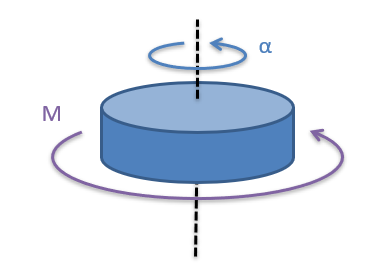
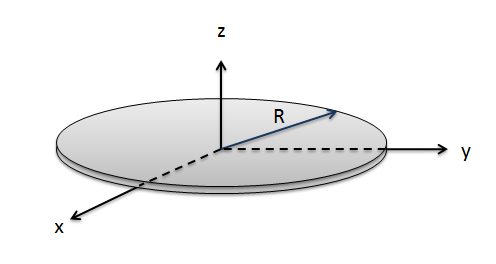
Un disco circular delgado tiene una masa de 6 kg y un radio de 0.3 metros. Determinar el momento de inercia de masa para el disco alrededor\(z\) del eje.
- Solución:
-
Video\(\PageIndex{2}\): Solución trabajada a problema de ejemplo\(\PageIndex{1}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/e1ZDv6xDUV8.
Ejemplo\(\PageIndex{2}\)
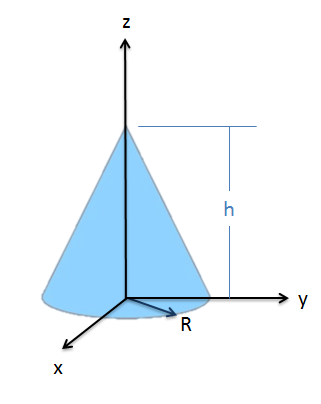
Determine el momento de inercia de masa alrededor del\(z\) eje para este cono general con radio base\(R\)\(h\), altura y masa\(m\).
- Solución:
-
Video\(\PageIndex{3}\): Solución trabajada a problema de ejemplo\(\PageIndex{2}\), proporcionado por el Dr. Jacob Moore. Fuente de YouTube: https://youtu.be/rL7xWl9FfWc.