
6.6.E: Problemas en mapas lineales biyectivos y jacobianos
- Page ID
- 113726
(i) ¿Puede un determinante funcional\(f=\operatorname{det}\left(v_{i k}\right)\) (ver Nota 1) ser continuo o diferenciable aunque las funciones no lo\(v_{i k}\) sean?
ii) ¿Un mapa jacobiano debe\(J_{f}\) ser continuo o diferenciable si\(f\) es así?
Dar pruebas o contraejemplos.
\(\Rightarrow\)Demostrar regla b) sobre determinantes. De manera más general, demuestre que si\(f(\vec{x})=\vec{x}\) en un set abierto\(A \subseteq E^{n}\left(C^{n}\right),\) entonces\(J_{f}=1\) en\(A\).
Dejar\(f : E^{n} \rightarrow E^{n}\) (o\(C^{n} \rightarrow C^{n}\)),\(f=\left(f_{1}, \ldots, f_{n}\right)\).
Supongamos que cada uno\(f_{k}\) depende\(x_{k}\) solo de, es decir,
\[f_{k}(\vec{x})=f_{k}(\vec{y}) \text{ if } x_{k}=y_{k},\]
independientemente de las otras coordenadas\(x_{i}, y_{i}.\) Demostrar eso\(J_{f}=\prod_{k=1}^{n} D_{k} f_{k}\).
[Pista:\(D_{k} f_{i}=0\) Muéstralo si\(i \neq k\).]
En Corolario 1, mostrar que
\[J_{h}(\vec{p})=\prod_{k=1}^{n} D_{k} f_{k}(\vec{p}) \cdot J_{g}(\vec{q})\]
si\(f\) también tiene la propiedad especificada en Problema 3. Entonces haz todo en “variables”, con\(y_{k}=y_{k}\left(x_{k}\right)\) en lugar de\(f_{k}\).
Dejar\(E^{\prime}=E^{1}\) entrar la Nota 1. Demostrar que si todos los\(v_{i k}\) son diferenciables en\(p,\) entonces\(f^{\prime}(p)\) es la suma de\(n\) determinantes, cada uno derivado de det\(\left(v_{i k}\right),\) sustituyendo los términos de una columna por sus derivados.
[Pista: Use el Problema 6 en el Capítulo 5, §1.]
Hacer el Problema 5 para parciales de\(f,\) con\(E^{\prime}=E^{n}\left(C^{n}\right),\) y para direccionales\(D_{\vec{u}} f,\) en cualquier espacio normado\(E^{\prime}.\) (Primero, probar fórmulas análogas al Problema 6 en el Capítulo 5, §1; usar la Nota 3 en §1.) Por último, hazlo por el diferencial,\(d f(\vec{p} ; \cdot).\)
En la Nota 1 de §4, expresar las matrices en términos de parciales (ver Teorema 4 en §3). Inventar una notación “variable” para tales matrices, imitando a los jacobianos (Corolario 3).
(i) Demostrar que
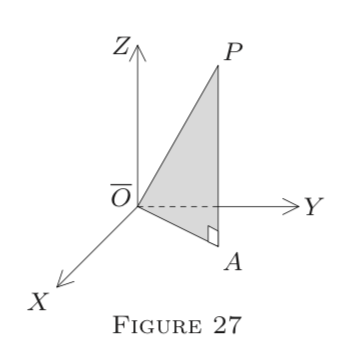
\[\frac{\partial(x, y, z)}{\partial(r, \theta, \alpha)}=-r^{2} \sin \alpha\]
si
\[\begin{array}{l}{x=r \cos \theta,} \\ {y=r \sin \theta \sin \alpha, \text { and }} \\ {z=r \cos \alpha}\end{array}\]
(Esta transformación es de paso a polares en\(E^{3};\) ver Figura 27, donde\(r=O P, \angle X O A=\theta,\) y\(\angle A O P=\alpha.)\)
(ii) Qué pasa si\(x=r \cos \theta, y=r \sin \theta,\) y\(z=z\) permanece sin cambios (paso a cilindrico coordenadas)?
iii) Lo mismo para\(x=e^{r} \cos \theta, y=e^{r} \sin \theta,\) y\(z=z\).
Es\(f=\left(f_{1}, f_{2}\right) : E^{2} \rightarrow E^{2}\) uno a uno o biyectiva, y es\(J_{f} \neq 0,\) si
(i)\(f_{1}(x, y)=e^{x} \cos y\) y\(f_{2}(x, y)=e^{x} \sin y\);
(ii)\(f_{1}(x, y)=x^{2}-y^{2}\) y\(f_{2}(x, y)=2 x y ?\)
Definir\(f : E^{3} \rightarrow E^{3}\) (o\(C^{3} \rightarrow C^{3}\))
\[f(\vec{x})=\frac{\vec{x}}{1+\sum_{k=1}^{3} x_{k}}\]
en
\[A=\left\{\vec{x} | \sum_{k=1}^{3} x_{k} \neq-1\right\}\]
y\(f=\overrightarrow{0}\) en\(-A.\) Probar lo siguiente.
(i)\(f\) es uno a uno en\(A\) (encontrar\(f^{-1}!\)).
ii)\(J_{f}(\vec{x})=\frac{1}{\left(1+\sum_{k=1}^{3} x_{k}\right)^{4}}\).
(iii) Describir\(-A\) geométricamente.
Dados los conjuntos\(A, B\) y mapas\(f, g : A \rightarrow E^{\prime}, h : E^{\prime} \rightarrow E,\) y\(k : B \rightarrow A,\) demostrar que
(i)\((f \pm g) \circ k=f \circ k \pm g \circ k,\) y
(ii)\(h \circ(f \pm g)=h \circ f \pm h \circ g\) si\(h\) es lineal.
Utilice estas leyes distributivas para verificar que
\[\phi^{-1} \circ(\theta-\phi) \circ \theta^{-1}=\phi^{-1}-\theta^{-1}\]
En Corolario 3.
[Pista: Primero verifique la asociatividad de la composición cartográfica.]
Demostrar que si\(\phi : E^{\prime} \rightarrow E\) es lineal y uno a uno, entonces es\(\phi^{-1} : E^{\prime \prime} \rightarrow E^{\prime},\) donde\(E^{\prime \prime}=\phi\left[E^{\prime}\right].\)
Dejar\(\vec{v}_{1}, \ldots, \vec{v}_{n}\) ser los vectores de columna en\(\operatorname{det}[\phi].\) Probar que\(\operatorname{det}[\phi]\) se convierte en
(i)\(c \cdot \operatorname{det}[\phi]\) si uno de los\(\vec{v}_{k}\) se multiplica por un escalar\(c\);
(ii)\(-\operatorname{det}[\phi],\) si alguno de los dos\(\vec{v}_{k}\) se intercambian (considerar\(\lambda\) en la fórmula (1)).
Además, mostrar que
(iii)\(\operatorname{det}[\phi]\) no cambia si algunos\(\vec{v}_{k}\) son reemplazados por\(\vec{v}_{k}+c \vec{v}_{i}(i \neq k)\);
(iv)\(\operatorname{det}[\phi]=0\) si algunos\(\vec{v}_{k}\) lo son\(\overrightarrow{0},\) o si dos de los\(\vec{v}_{k}\) son iguales.