
1.1: Ejemplos
- Page ID
- 118059

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Ejemplo 1.1.1:
\(u_y=0\), donde\(u=u(x,y)\). Todas las funciones\(u=w(x)\) son soluciones.
Ejemplo 1.1.2:
\(u_x=u_y\), donde\(u=u(x,y)\). Un cambio de coordenadas transforma esta ecuación en una ecuación del primer ejemplo. Establecer\(\xi=x+y,\ \eta=x-y\), entonces
$$
u (x, y) =u\ izquierda (\ frac {\ xi+\ eta} {2},\ frac {\ xi-\ eta} {2}\ derecha) =:v (\ xi,\ eta).
$$
Supongamos\(u\in C^1\), entonces
$$
v_\ eta=\ frac {1} {2} (u_x-u_y).
$$
Si\(u_x=u_y\), entonces\(v_\eta=0\) y viceversa, así\(v=w(\xi)\) son soluciones para\(C^1\) -funciones arbitrarias\(w(\xi)\). En consecuencia, tenemos una gran clase de soluciones de la ecuación diferencial parcial original:\(u=w(x+y)\) con una\(C^1\) función arbitraria\(w\).
Ejemplo 1.1.3:
Una condición necesaria y suficiente tal que para determinadas\(C^1\) -funciones\(M,\ N\) la integral
$$
\ int_ {P_0} ^ {P_1}\ M (x, y) dx+n (x, y) dy
$$
es independiente de la curva que conecta los puntos\(P_0\) con\(P_1\) en un simple conectado dominio\(\Omega\subset\mathbb{R}^2\) es que la ecuación diferencial parcial (condición de integrabilidad)
$$
m_y=N_x
$$
in\(\Omega\).
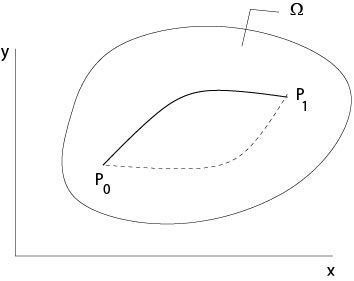
Figura 1.1.1: Independencia del camino
Esta es una ecuación para dos funciones. Una gran clase de soluciones viene dada por\(M=\Phi_x,\ N=\Phi_y\), donde\(\Phi(x,y)\) es una\(C^2\) función arbitraria. Del teorema de Gauss se deduce que todas estas son\(C^1\) soluciones de la ecuación diferencial anterior.
Ejemplo 1.1.4: Método de un multiplicador integrador para un ordinario
diferencial
ecuación
Considere la ecuación diferencial ordinaria
$$
M (x, y) Dx+n (x, y) dy=0
$$
para\(C^1\) -funciones dadas\(M,\ N\). Entonces buscamos una\(C^1\) -función\(\mu(x,y)\) tal que\(\mu Mdx+\mu Ndy\) sea un diferencial total, es decir, que\((\mu M)_y=(\mu N)_x\) se satisfaga. Esta es una ecuación diferencial parcial lineal de primer orden para\(\mu\):
$$
M\ mu_y-N\ mu_x=\ mu (N_x-M_y).
\]
Ejemplo 1.1.5:
Dos\(C^1\) -funciones\(u(x,y)\) y\(v(x,y)\) se dice que son funcionalmente dependientes si
$$
\ det\ left (\ begin {array} {cc} u_x&u_y\\ v_x&v_y\ end {array}\ right) =0,
$$
que es una ecuación diferencial parcial lineal de primer orden para\(u\) si\(v\) es una\(C^1\) función dada. Una gran clase de soluciones viene dada por
$$
u=h (v (x, y)),
$$
donde\(H\) es una\(C^1\) función arbitraria.
Ejemplo 1.1.6: Ecuaciones de Cauchy-Riemann
Establecer\(f(z)=u(x,y)+iv(x,y)\), donde\(z=x+iy\) y\(u,\ v\) se les dan\(C^1(\Omega)\) -funciones. Aquí\(\Omega\) hay un dominio en\(\mathbb{R}^2\). Si la función\(f(z)\) es diferenciable con respecto a la variable compleja\(z\) entonces\(u,\ v\) satisfacer las ecuaciones de Cauchy-Riemann
$$
u_x=v_y,\\ u_y=-v_x.
$$
Se sabe a partir de la teoría de funciones de una variable compleja que la parte real\(u\) y la parte imaginaria\(v\) de una función diferenciable\(f(z)\) son soluciones de la ecuación de Laplace
$$
\ triángulo u=0,\\\ triángulo v=0,
$$
donde\(\triangle u= u_{xx}+u_{yy}\).
Ejemplo 1.1.7: Potencial Newton
El potencial Newton
$$
u=\ frac {1} {\ sqrt {x^2+y^2+z^2}}
$$
es una solución de la ecuación de Laplace en\(\mathbb{R}^3\setminus{(0,0,0)}\), es decir, de
$$
u_ {xx} +u_ {yy} +u_ {zz} =0.
\]
Ejemplo 1.1.8: Ecuación de calor
Dejar\(u(x,t)\) ser la temperatura de un punto\(x\in\Omega\) en el tiempo\(t\), donde\(\Omega\subset\mathbb{R}^3\) es un dominio. Entonces\(u(x,t)\) satisface en\(\Omega\times[0,\infty)\) la ecuación de calor
$$
u_t=k\ triángulo u,
$$
donde\(\triangle u= u_{x_1x_1}+u_{x_2x_2}+u_{x_3x_3}\) y\(k\) es una constante positiva. La condición
$$
u (x,0) =u_0 (x),\\ x\ in\ Omega,
$$
donde\(u_0(x)\) se da, es una condición inicial asociada a la ecuación de calor anterior. La condición
$$
u (x, t) =h (x, t),\\ x\ in\ parcial\ Omega,\ t\ ge0,
$$
donde\(h(x,t)\) se da, es una condición límite para la ecuación de calor.
Si\(h(x,t)=g(x)\), es decir,\(h\) es independiente de\(t\), entonces uno espera que la solución\(u(x,t)\) tiende a una función\(v(x)\) si\(t\to\infty\). Además, resulta que\(v\) es la solución del problema del valor límite para la ecuación de Laplace
\ begin {eqnarray*}
\ triángulo v&=&0\\\ mbox {in}\\ Omega\\
v&=&g (x)\\\ mbox {on}\\ parcial\ Omega.
\ end {eqnarray*}
Ejemplo 1.1.9: Ecuación de onda
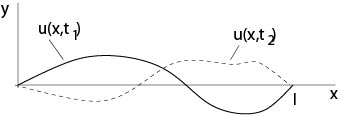
Figura 1.1.2: Cadena oscilante
La ecuación de onda
$$
u_ {tt} =c^2\ triángulo u,
$$
donde\(u=u(x,t)\),\(c\) es una constante positiva, describe oscilaciones de membranas o de dominios tridimensionales, por ejemplo. En el caso unidimensional
$$
u_ {tt} =c^2 u_ {xx}
$$
describe oscilaciones de una cadena.
Las condiciones iniciales asociadas son
$$
u (x,0) =u_0 (x),\\ u_t (x,0) =u_1 (x),
$$
donde\(u_0,\ u_1\) se dan funciones. Así se prescriben la posición inicial y la velocidad inicial.
Si la cadena es finita se describen adicionalmente las condiciones de contorno, por ejemplo
$$
u (0, t) =0,\\ u (l, t) =0\\\ mbox {for all}\ t\ ge 0.
\]