
1.3: Ecuaciones diferenciales parciales
- Page ID
- 118048

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)El mismo procedimiento anterior aplicado a la siguiente integral múltiple conduce a una ecuación diferencial parcial cuasilineal de segundo orden. Set
$$E (v) =\ int_\ Omega\ F (x, v,\ nabla v)\ dx,\]
donde\(\Omega\subset\mathbb{R}^n\) es un dominio,\(x=(x_1,\ldots,x_n)\),\(v=v(x):\ \Omega\mapsto\mathbb{R}^1\), y\(\nabla v=(v_{x_1},\ldots,v_{x_n})\). Supongamos que la función\(F\) es suficientemente regular en sus argumentos. Para una función dada\(h\), definida en\(\partial\Omega\), establecer
$$V=\ {v\ en C^2 (\ overline {\ Omega}):\ v=h\\ mbox {on}\\ parcial\ Omega\}.\]
Ecuación de Euler. Dejar\(u\in V\) ser una solución de (P), entonces
$$\ suma_ {i=1} ^n\ frac {\ parcial} {\ parcial x_i} F_ {u_ {x_i}} -f_u=0$$
pulg\(\Omega\).
Comprobante. Ejercicio. Pista: Extender el lema fundamental anterior del cálculo de variaciones al caso de múltiples integrales. El intervalo\((x_0-\delta,x_0+\delta)\) en la definición de\(\phi\) debe ser reemplazado por una bola con centro en\(x_0\) y radio\(\delta\).
Ejemplo 1.2.2.1: Integral de Dirichlet
En dos dimensiones la integral de Dirichlet viene dada por
$$D (v) =\ int_\ Omega\\ izquierda (v_x^2+v_y^2\ derecha)\ dxdy\]
y la ecuación de Euler asociada es la ecuación de Laplace\(\triangle u=0\) en\(\Omega\).
Así, existe una relación natural entre el problema del valor límite
$$\ triángulo u=0\\\ mbox {in}\\ Omega,\ u=h\\\ mbox {on}\\\\ parcial\ Omega\]
y el problema variacional
$$\ min_ {v\ en V}\ D (v).\]
Pero estos problemas no son equivalentes en general. Puede suceder que el problema del valor límite tenga una solución pero el problema variacional no tiene solución, para un ejemplo ver Courant y Hilbert [4], Vol. 1, p. 155, donde\(h\) es una función continua y la solución asociada\(u\) del problema del valor límite no tiene integral de Dirichlet finito.
Los problemas son equivalentes, siempre que la función de valor límite dada\(h\) esté en la clase
\(H^{1/2}(\partial\Omega)\), ver Leones y Magenes [14].
Ejemplo 1.2.2.2: Ecuación mínima de superficie
El problema superficial mínimo no paramétrico en dos dimensiones es encontrar un minimizador\(u=u(x_1,x_2)\) del problema
$$\ min_ {v\ in V}\ int_\ Omega\\ sqrt {1+v_ {x_1} ^2+v_ {x_2} ^2}\ dx,\]
donde para una función dada\(h\) definida en el límite del dominio\(\Omega\)
$$V=\ {v\ en C^1 (\ overline {\ Omega}):\ v=h\\ mbox {on}\\ parcial\ Omega\}.\]
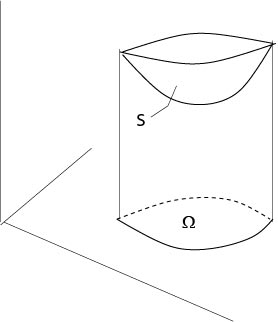
Figura 1.2.2.1: Superficie de comparación
Supongamos que el minimizador satisface la suposición de regularidad\(u\in C^2(\Omega)\), entonces
\(u\) es una solución de la ecuación de superficie mínima (ecuación de Euler) en\(\Omega\)
\ begin {ecuación}
\ label {mse}
\ frac {\ partial} {\ partial x_1}\ left (\ frac {u_ {x_1}} {\ sqrt {1+|\ nabla u|^2}}\ derecha) +
\ frac {\ parcial} {\ parcial}\ x_2}\ izquierda (\ frac {u_ {x_2}} {\ sqrt {1+|\ nabla u|^2}}\ derecha) =0.
\ end {ecuación}
De hecho, la suposición adicional\(u\in C^2(\Omega)\) es superflua ya que se desprende de consideraciones de regularidad para ecuaciones elípticas cuasilineales de segundo orden, ver por ejemplo Gilbarg y Trudinger [9].
Vamos\(\Omega=\mathbb{R}^2\). Cada función lineal es una solución de la ecuación de superficie mínima (\ ref {mse}). Bernstein [2] demostró que no hay otras soluciones de la mínima cuación superficial. Esto es cierto también para dimensiones más altas\(n\le7\), ver Simons [19].
Si\(n\ge8\), entonces también existen otras soluciones que definen conos, ver Bombieri, De Giorgi y Giusti [3].
La ecuación de superficie mínima linealizada\(u\equiv0\) es la ecuación de Laplace\(\triangle u=0\). En las funciones\(\mathbb{R}^2\) lineales hay soluciones pero también muchas otras funciones en contraste con la ecuación de superficie mínima. Esta notable diferencia es causada por la fuerte no linealidad de la ecuación de superficie mínima.
Las superficies mínimas más generales se describen mediante el uso de representaciones paramétricas. Un ejemplo se muestra en la Figura 1.2.2.2 1. Ver [18], pp. 62, por ejemplo, para superficies mínimas rotacionalmente simétricas.

Figura 1.2.2.2: Superficie mínima rotacionalmente simétrica
1 Un experimento de Mathetikum de Beutelspacher, Wissenschaftsjahr 2008, Leipzig
Problemas de valor límite de tipo Neumann
Set\(V=C^1(\overline{\Omega})\) y
$$E (v) =\ int_\ Omega\ F (x, v,\ nabla v)\ dx-\ int_ {\ parcial\ Omega}\ g (x, v)\ ds,\]
donde\(F\) y\(g\) se les otorgan funciones suficientemente regulares y\(\Omega\subset\mathbb{R}^n\) es un dominio limitado y suficientemente regular.
Supongamos que\(u\) es un minimizador de\(E(v)\) in\(V\), es decir
$$u\ in V:\\ E (u)\ le E (v)\\\ mbox {para todos}\ v\ en V,\]
entonces
\ begin {eqnarray*}
\ int_\ Omega\\ grande (\ sum_ {i=1} ^nf_ {u_ {x_i}} (x, u,\ nabla u)\ phi_ {x_i} &+& f_u (x, u,\ nabla u)\ phi\ big)\ dx\
&-&\ int_ {\ parcial\ Omega}\ g_u (x, u)\ phi\ ds =0
\ end {eqnarray*}
para todos\(\phi\in C^1(\overline{\Omega})\). Supongamos adicionalmente\(u\in C^2(\Omega)\), entonces\(u\) es una solución del problema del valor límite de tipo Neumann
\ begin {eqnarray*}
\ sum_ {i=1} ^n\ frac {\ partial} {\ partial x_i} F_ {u_ {x_i}} -f_u&=&0\\\ mbox {in}\\ Omega\
\ sum_ {i=1} ^nf_ {u_ {x_ {_i}}\ nu_i-g_u&=&0\\\ mbox {on}\\ parcial\ Omega,
\ end {eqnarray*}
donde\(\nu=(\nu_1,\ldots,\nu_n)\) es normal la unidad exterior en el límite\(\partial\Omega\). Esto sigue después de la integración por partes a partir del lema básico del cálculo de las variaciones.
Ejemplo 1.2.2.3: Ecuación de Laplace
Set
$$E (v) =\ frac {1} {2}\ int_\ Omega\ |\ nabla v|^2\ dx-\ int_ {\ parcial\ Omega}\ h (x) v\ ds,\]
entonces el problema del valor límite asociado es
\ begin {eqnarray*}
{\ triángulo} u&=&0\\\ mbox {in}\\ Omega\
\ frac {\ u parcial} {\ parcial\ nu} &=&h\\\ mbox {on}\\\ parcial\ Omega.
\ end {eqnarray*}
Ejemplo 1.2.2.4: Ecuación capilar
Dejar\(\Omega\subset\mathbb{R}^2\) y establecer
$$E (v) =\ int_\ Omega\\ sqrt {1+|\ nabla v|^2}\ dx+\ frac {\ kappa} {2}\ int_\ Omega\ v^2\ dx -\ cos\ gamma\ int_ {\ parcial\ Omega}\ v\ ds.\]
Aquí\(\kappa\) hay una constante positiva (constante de capilaridad) y\(\gamma\) es el ángulo de contacto límite (constante), es decir, el ángulo entre la pared del recipiente y la superficie capilar, definido por\(v=v(x_1,x_2)\), en el límite.
Entonces el problema relacionado con el valor límite es
\ begin {eqnarray*}
\ text {div}\ (Tu) &=&\ kappa u\\\ mbox {in}\\ Omega\
\ nu\ cdot Tu&=&\ cos\ gamma\\ mbox {on}\\ parcial\ Omega,
\ end {eqnarray*}
donde usamos la abreviatura
$$Tu=\ frac {\ nabla u} {\ sqrt {1+|\ nabla u|^2}},\]
div\((Tu)\) es el lado izquierdo de la ecuación de superficie mínima (\ ref {mse}) y es el doble de la curvatura media de la superficie definida por\(z=u(x_1,x_2)\), ver un ejercicio.
El problema anterior describe el ascenso de un líquido, agua por ejemplo, en un cilindro vertical con sección transversal\(\Omega\). Supongamos que la gravedad se dirige hacia abajo en la dirección del\(x_3\) eje negativo. La Figura 1.2.2.3 muestra que el líquido puede elevarse a lo largo de una cuña vertical lo cual es consecuencia de la fuerte no linealidad de las ecuaciones subyacentes, ver Finn [7]. Esta foto fue tomada de [15].
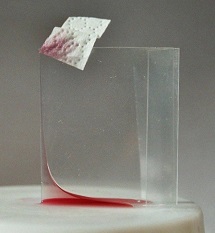
Figura 1.2.2.3: Ascenso de líquido en cuña