
2.1: Ecuaciones Lineales
- Page ID
- 118153

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Comencemos con la ecuación lineal homogénea
\ begin {ecuación}
\ label {homtwo}
a_1 (x, y) u_x+a_2 (x, y) u_y=0.
\ end {equation}
Supongamos que hay una\(C^1\) -solución\(z=u(x,y)\). Esta función define una superficie\(S\) que tiene en\(P=(x,y,u(x,y))\) la normal
$$
{\ bf N} =\ frac {1} {\ sqrt {1+|\ nabla u|^2}} (-u_x, -u_y,1)
$$
y el plano tangencial definido por
$$
\ zeta-z=u_x (x, y) (\ xi-x) +u_y (x, y) (\ eta-eta-y) .
$$
Conjunto\(p=u_x(x,y)\),\(q=u_y(x,y)\) y\(z=u(x,y)\). La tupla\((x,y,z,p,q)\) se llama elemento de superficie y el\((x,y,z)\) soporte de tupla del elemento de superficie. El plano tangencial está definido por el elemento de superficie. Por otro lado, la ecuación diferencial (\ ref {homtwo})
$$
a_1 (x, y) p+a_2 (x, y) q=0
$$
define en cada soporte\((x,y,z)\) un haz de planos si consideramos que todos\((p,q)\) satisfacen esta ecuación. Para fijos\((x,y)\), esta familia de planos\(\Pi(\lambda)=\Pi(\lambda;x,y)\) se define por una familia de ascensos de un parámetro\(p(\lambda)=p(\lambda;x,y)\),\(q(\lambda)=q(\lambda;x,y)\).
La envolvente de estos planos es una línea desde
$$
a_1 (x, y) p (\ lambda) +a_2 (x, y) q (\ lambda) =0,
$$ lo
que implica que la normal\({\bf N}(\lambda)\) on\(\Pi(\lambda)\) es perpendicular on\((a_1,a_2,0)\).
Considerar una curva\({\bf x}(\tau)=(x(\tau),y(\tau),z(\tau))\) en\(\mathcal S\), dejar
\(T_{{\bf x}_0}\) ser el plano tangencial en\({\bf x}_0=(x(\tau_0),y(\tau_0),z(\tau_0))\) de\(\mathcal S\)
y considerar en\(T_{{\bf x}_0}\) la línea
$$
L:\\ l (\ sigma) = {\ bf x} _0+\ sigma {\ bf x} '(\ tau_0),\\\ sigma\ in\ mathbb {R} ^1,
$$
ver Figura 2.1.1.
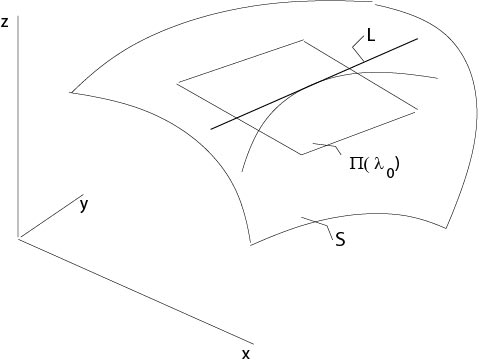
Figura 2.1.1: Curva sobre una superficie
Suponemos que\(L\) coincide con el sobre, que es una línea aquí, de la familia de aviones\(\Pi(\lambda)\) en\((x,y,z)\). Asumir eso\(T_{{\bf x}_0}=\Pi(\lambda_0)\) y considerar dos planos
\ begin {eqnarray*}
\ Pi (\ lambda_0):\\\ z-z_0&=& (x-x_0) p (\ lambda_0) + (y-y_0) q (\ lambda_0)
\\ Pi (\ lambda_0+h):\\ z-z_0&=& (x-x_0) p (\ lambda_0+h) + (y-y_0) q (\ lambda_0+h).
\ end {eqnarray*}
En la intersección\(l(\sigma)\) tenemos
$$
(x-x_0) p (\ lambda_0) + (y-y_0) q (\ lambda_0) =( x-x_0) p (\ lambda_0+h) + (y-y_0) q (\ lambda_0+h).
$$
Así,
$$
x' (\ tau_0) p' (\ lambda_0) +y' (\ tau_0) q' (\ lambda_0) =0.
$$
De la ecuación diferencial
$$
a_1 (x (\ tau_0), y (\ tau_0)) p (\ lambda) +a_2 (x (\ tau_0), y (\ tau_0)) q (\ lambda) =0
$$
sigue
$$
a_1p' (\ lambda_0) +a_2q' (\ lambda_0) =0.
$$
En consecuencia
$$
(x' (\ tau), y' (\ tau)) =\ frac {x' (\ tau)} {a_1 (x (\ tau, y (\ tau))} (a_1 (x (\ tau), y (\ tau)), a_2 (x (\ tau), y (\ tau)),
$$
ya que\(\tau_0\) era un parámetro arbitrario. Aquí asumimos que\(x'(\tau)\not=0\) y\(a_1(x(\tau),y(\tau))\not=0\).
Luego introducimos un nuevo parámetro\(t\) por la inversa de\(\tau=\tau(t)\), donde
$$
t (\ tau) =\ int_ {\ tau_0} ^\ tau\ frac {x' (s)} {a_1 (x (s), y (s))}\ ds.
$$
Sigue\(x'(t)=a_1(x,y),\ y'(t)=a_2(x,y)\). Denotamos\({\bf x}(\tau(t))\) por\({\bf x}(t)\) otra vez.
Ahora consideramos el problema del valor inicial
\ begin {ecuación}
\ label {chartwo}
x' (t) =a_1 (x, y),\\ y' (t) =a_2 (x, y),\\ x (0) =x_0,\ y (0) =y_0.
\ end {equation}
De la teoría de las ecuaciones diferenciales ordinarias se deduce (Teorema de Picard-Lindelöf) que hay una solución única en un vecindario de\(t=0\) siempre que las funciones\(a_1,\ a_2\) estén en\(C^1\). De esta definición de las curvas\((x(t),y(t))\) se deduce que
el campo de direcciones\((a_1(x_0,y_0),a_2(x_0,y_0))\) define la pendiente de estas curvas en\((x(0),y(0))\).
Definición. Las ecuaciones diferenciales en (\ ref {chartwo}) se denominan ecuaciones características o sistema característico y las soluciones del problema de valor inicial asociado se denominan curvas características.
Definición. Se dice que una función\(\phi(x,y)\) es una integral del sistema característico si\(\phi(x(t),y(t))=const.\) para cada curva característica. La constante depende de la curva característica considerada.
Proposición 2.1. Supongamos que\(\phi\in C^1\) es una integral, entonces\(u=\phi(x,y)\) es una solución de (\ ref {homtwo}).
Comprobante. Considere para dado\((x_0,y_0)\) el problema de valor inicial anterior (\ ref {chartwo}). \(\phi(x(t),y(t))=const.\)Ya que sigue
$$
\ phi_xx'+\ phi_yy'=0
$$
por $ |t|<t_0$,\(t_0>0\) y suficientemente pequeño.
Así
$$
\ phi_x (x_0, y_0) a_1 (x_0, y_0) +\ phi_y (x_0, y_0) a_2 (x_0, y_0) =0 (x_0, y_0) =0.
\]
\(\Box\)
OBSERVACIÓN. Si\(\phi(x,y)\) es una solución de ecuación (\ ref {homtwo}) entonces también\(H(\phi(x,y))\), donde\(H(s)\) está una\(C^1\) función dada.
Ejemplos
Ejemplo 2.1.1:
Considera
$$
a_1u_x+a_2u_y=0,
$$
donde\(a_1,\ a_2\) están las constantes. El sistema de ecuaciones características es
$$
x'=a_1,\ y'=a_2.
$$
Así, las curvas características son líneas rectas paralelas definidas por
$$
x=A_1t+A,\ y=A_2T+b,
$$
donde\(A,\ B\) son constantes arbitrarias. De estas ecuaciones se deduce que
$$
\ phi (x, y) :=a_2x-a_1y
$$
es constante a lo largo de cada curva característica. En consecuencia, ver la Proposición 2.1,\(u=a_2x-a_1y\) es una solución de la ecuación diferencial. De un ejercicio se deduce que
\ begin {ecuación}
\ label {cyl}
u=h (a_2x-a_1y),
\ end {ecuación}
donde\(H(s)\) es una\(C^1\) función arbitraria, es también una solución. Dado que\(u\) es constante cuando\(a_2x-a_1y\) es constante, la ecuación (\ ref {cyl}) define las superficies de los cilindros que son generadas por líneas rectas paralelas que son paralelas al\((x,y)\) plano, ver Figura 2.1.2.
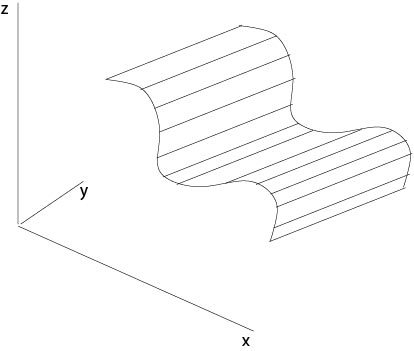
Figura 2.1.2: Superficies de cilindros
Ejemplo 2.1.2:
Considera la ecuación diferencial
$$
xu_x+yu_y=0.
$$
Las ecuaciones características son
$$
x'=x,\ y'=y,
$$
y las curvas características están dadas por
$$
x=AE^t,\ y=be^t,
$$
donde\(A,\ B\) son arbitrarias constantes. Entonces una integral es\(y/x\),\(x\not=0\), y para una\(C^1\) función dada la función\(u=H(x/y)\) es una solución de la ecuación diferencial. Si\(y/x=const.\), entonces\(u\) es constante. Supongamos que\(H'(s)>0\), por ejemplo, luego\(u\) define helicoides derechos (en alemán: Wendelflächen), ver Figura 2.1.3.
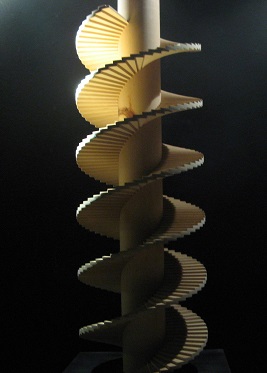
Figura 2.1.3: Helicoide derecho,\(a^2<x^2+y^2<R^2\) (Museo Ideale Leonardo da Vinci, Italia)
Ejemplo 2.1.3:
Considera la ecuación diferencial
$$
yu_x-xu_y=0.
$$
El sistema característico asociado es
$$
x'=y,\ y'=-x.
$$
Si sigue
$$
x'x+yy'=0,
$$
o, equivalentemente,
$$
\ frac {d} {dt} (x^2+y^2) =0,
$$ lo
que implica que\(x^2+y^2=const.\) a lo largo de cada característica. Así, las superficies rotacionalmente simétricas definidas por\(u=H(x^2+y^2)\), donde\(H'\not=0\), son soluciones de la ecuación diferencial.
Ejemplo 2.1.4:
Las ecuaciones características asociadas a
$$
ayu_x+bxu_y=0,
$$
donde\(a,\ b\) son constantes positivas,
están dadas por
$$
x'=ay,\ y'=bx.
$$
Sigue\(bxx'-ayy'=0\), o equivalentemente,
$$
\ frac {d} {dt} (bx^2-ay^2) =0.
$$
Las soluciones de la ecuación diferencial son\(u=H(bx^2-ay^2)\), las cuales definen superficies que tienen una hipérbola como intersección con planos paralelos al\((x,y)\) plano. Aquí\(H(s)\) hay una\(C^1\) función arbitraria,\(H'(s)\not=0\).