
4.2.1: Caso n=3
- Page ID
- 118123

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La ecuación de Euler-Poisson-Darboux en este caso es
$$ (rM) _ {rr} =c^ {-2} (rM) _ {tt}.\]
Así\(rM\) es la solución de la ecuación de onda unidimensional con datos iniciales
\ begin {ecuación}
\ label {initialn3}\ tag {4.2.1.1}
(rM) (r,0) =rF (r)\\\ (rM) _t (r,0) =rG (r).
\ end {equation}
De la fórmula d'Alembert obtenemos formalmente
\ begin {eqnarray}
\ label {meansol1}
M (r, t) &=&\ dfrac {(r+ct) F (r+ct) + (r-ct) F (r-ct)} {2r}\\ tag {4.2.1.2}
&&+\ dfrac {1} {2cr}\ int_ {r-ct} ^ {r+ct}\\ xi G (\ xi)\ d\ xi.
\ end {eqnarray}
El lado derecho de la fórmula anterior está bien definido si el dominio de dependencia\([x-ct,x+ct]\) es un subconjunto de\((0,\infty)\). Podemos extender\(F\) y\(G\) hacia\(F_0\) y\(G_0\) que se definen sobre\((-\infty,\infty)\) tal que\(rF_0\) y\(rG_0\) son\(C^2(\mathbb{R}^1)\) -funciones de la siguiente manera.
Set
$$
F_0 (r) =\ left\ {\ begin {array} {r@ {\ qua d:\quad} l}
F (r) &r>0\\
f (x) &r=0\\
F (-r) &r<0
\ end {array}\ right. \
\]
La función\(G_0(r)\) viene dada por la misma definición donde\(F\) y\(f\) son reemplazadas por\(G\) y\(g\), respectivamente.
Lema. \(rF_0(r),\ rG_0(r)\in C^2(\mathbb{R}^2)\).
Prueba. De la definición de\(F(r)\) y\(G(r)\),\(r>0\), se desprende del teorema del valor medio
$$\ lim_ {r\ a+0} F (r) =f (x),\\\\ lim_ {r\ a+0} G (r) =g (x).\]
Así\(rF_0(r)\) y\(rG_0(r)\) son\(C(\mathbb{R}^1)\) -funciones. Estas funciones también están en\(C^1(\mathbb{R}^1)\). Esto sigue desde\(F_0\) y\(G_0\) están en\(C^1(\mathbb{R}^1)\). Tenemos, por ejemplo,
\ begin {eqnarray*}
F' (r) &=&\ dfrac {1} {\ omega_n}\ int_ {\ parcial B_1 (0)}\\ suma_ {j=1} ^n f_ {y_j} (x+r\ xi)\ xi_j\ dS_\ xi\
F' (+0) &=&\ dfrac {1}\ omega_n}\ int_ {\ parcial B_1 (0)}\\ suma_ {j=1} ^n f_ {y_j} (x)\ xi_j\ ds_\ xi\
&=&\ dfrac {1} {\ omega_n}\ suma_ {j=1} ^n f_ {y_j } (x)\ int_ {\ parcial B_1 (0)}\ n_j\ dS_\ xi\\
&=&0.
\ end {eqnarray*}
Entonces,\(rF_0(r)\) y\(rG_0(r)\) están en\(C^2(\mathbb{R}^1)\), proveen\(F''\) y\(G''\) se acotan como\(r\to+0\). Esta propiedad se desprende de
$$F "(r) =\ dfrac {1} {\ omega_n}\ int_ {\ parcial B_1 (0)}\\ suma_ {i, j=1} ^n f_ {y_iy_j} (x+r\ xi)\ xi_i\ xi_j\ dS_\ xi.\]
Así
$$F "(+0) =\ dfrac {1} {\ omega_n}\ suma_ {i, j=1} ^n f_ {y_iy_j} (x)\ int_ {\ parcial B_1 (0)}\ n_in_j\ dS_\ xi.\]
Eso lo recordamos\(f,g\in C^2(\mathbb{R}^2)\) por suposición.
\(\Box\)
La solución del problema de valor inicial anterior, donde\(F\) y\(G\) son reemplazados por\(F_0\) y\(G_0\), respectivamente, es
\ begin {eqnarray*}
M_0 (r, t) &=&\ dfrac {(r+ct) F_0 (r+ct) + (r-ct) F_0 (r-ct)} {2r}\\
&&+\ dfrac {1} {2cr}\ int_ {r-ct} ^ {r+ct}\\ xi G_0 (\ xi)\ d\ xi.
\ end {eqnarray*}
Desde\(F_0\) e incluso\(G_0\) son funciones, tenemos
$$\ int_ {r-ct} ^ {ct-r}\\ xi G_0 (\ xi)\ d\ xi=0.\]
Así
\ begin {eqnarray}
M_0 (r, t) &=&\ dfrac {(r+ct) F_0 (r+ct) - (ct-r) F_0 (ct-r)} {2r}\ nonumber\
\ label {meansol2}\ tag {4.2.1.3}
&&+\ dfrac {1} {2cr}\ int_ {ct-r} ^ {ct+r}\\ xi G_0 (\ xi)\ d\ xi,
\ end {eqnarray}
ver Figura 4.2.1.1.
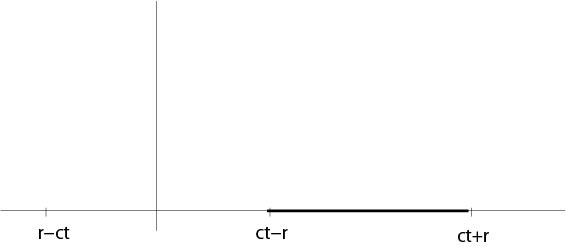
Figura 4.2.1.1: Dominio cambiado de integración
Para fijo\(t>0\) y se\(0<r<ct\) deduce que\(M_0(r,t)\) es la solución del problema de valor inicial con datos dados inicialmente (\ ref {initialn3}) ya que\(F_0(s)=F(s)\),\(G_0(s)=G(s)\) si\(s>0\).
Ya que para fijo\(t>0\)
$$u (x, t) =\ lim_ {r\ a 0} M_0 (r, t),\]
se desprende de la regla de d'Hospital que
\ begin {eqnarray*}
u (x, t) &=&CTF' (ct) +F (ct) +Tg (ct)\\
&=&\ dfrac {d} {dt}\ izquierda (tF (ct)\ derecha) +Tg (ct).
\ end {eqnarray*}
Teorema 4.2. Asumir\(f\in C^3(\mathbb{R}^3)\) y\(g\in C^2(\mathbb{R}^3)\) se dan. Luego existe una solución única\(u\in C^2(\mathbb{R}^3\times [0,\infty))\) del problema del valor inicial (4.2.2) - (4.2.3), donde\(n=3\), y la solución viene dada por la fórmula de Poisson
\ begin {eqnarray}
u (x, t) &=&\ dfrac {1} {4\ pi c^2}\ dfrac {\ parcial} {\ parcial} {\ t parcial}\ izquierda (\ dfrac {1} {t}\ int_ {\ parcial B_ {ct} (x)}\ f (y)\ ds_y\ derecha)\\ etiqueta {4.2.1.4}
&&+\ dfrac {1} {4\ pi c^2 t}\ int_ {\ parcial B_ {ct} (x)}\ g (y)\ ds_y.
\ end {eqnarray}
Prueba. Arriba hemos demostrado que una\(C^2\) -solución viene dada por la fórmula de Poisson. Bajo la suposición adicional\(f\in C^3\) se desprende de la fórmula de Poisson que esta fórmula define una solución que está en\(C^2\), ver F. John [10], p. 129.
\(\Box\)
Corolario. De la fórmula de Poisson vemos que el dominio de dependencia para\(u(x,t_0)\) es la intersección del cono definido por\(|y-x|=c|t-t_0|\) con el hiperplano definido por\(t=0\), ver Figura 4.2.1.2.
\ (n=3\).” style="width: 250px; alto: 230px;” width="250px” height="230px” src=” https://math.libretexts.org/@api/dek...pendenced3.jpg "/>
Figura 4.2.1.2: Dominio de dependencia, caso\(n=3\).