
6.1: Sistemas lineales
- Page ID
- 119598

6.1.1: Osciladores acoplados
EN LA SECCIÓN\(3.5\) VAMOS QUE LA SOLUCIÓN NUMERICA DE LAS ECUACIONES DE SEGUNDO ORDEN, O SUPERIORES, PUEDE SER EMPLEADA Dichos sistemas se acoplan típicamente en el sentido de que la solución de al menos una de las ecuaciones en el sistema depende de conocer una de las otras soluciones en el sistema. En muchos sistemas físicos este acoplamiento se lleva a cabo de forma natural. Introduciremos un modelo sencillo en esta sección para ilustrar el acoplamiento de osciladores simples.
Hay muchos problemas en la física que resultan en sistemas de ecuaciones. Esto se debe a que la ley más básica de la física la da la Segunda Ley de Newton, que establece que si un cuerpo experimenta una fuerza neta, se acelerará. Por lo tanto,
\[\sum \mathbf{F}=m \mathbf{a}\nonumber \]
Ya que\(\mathbf{a}=\ddot{\mathbf{x}}\) tenemos un sistema de ecuaciones diferenciales de segundo orden en general para problemas tridimensionales, o una ecuación diferencial de segundo orden para problemas unidimensionales para una sola masa.
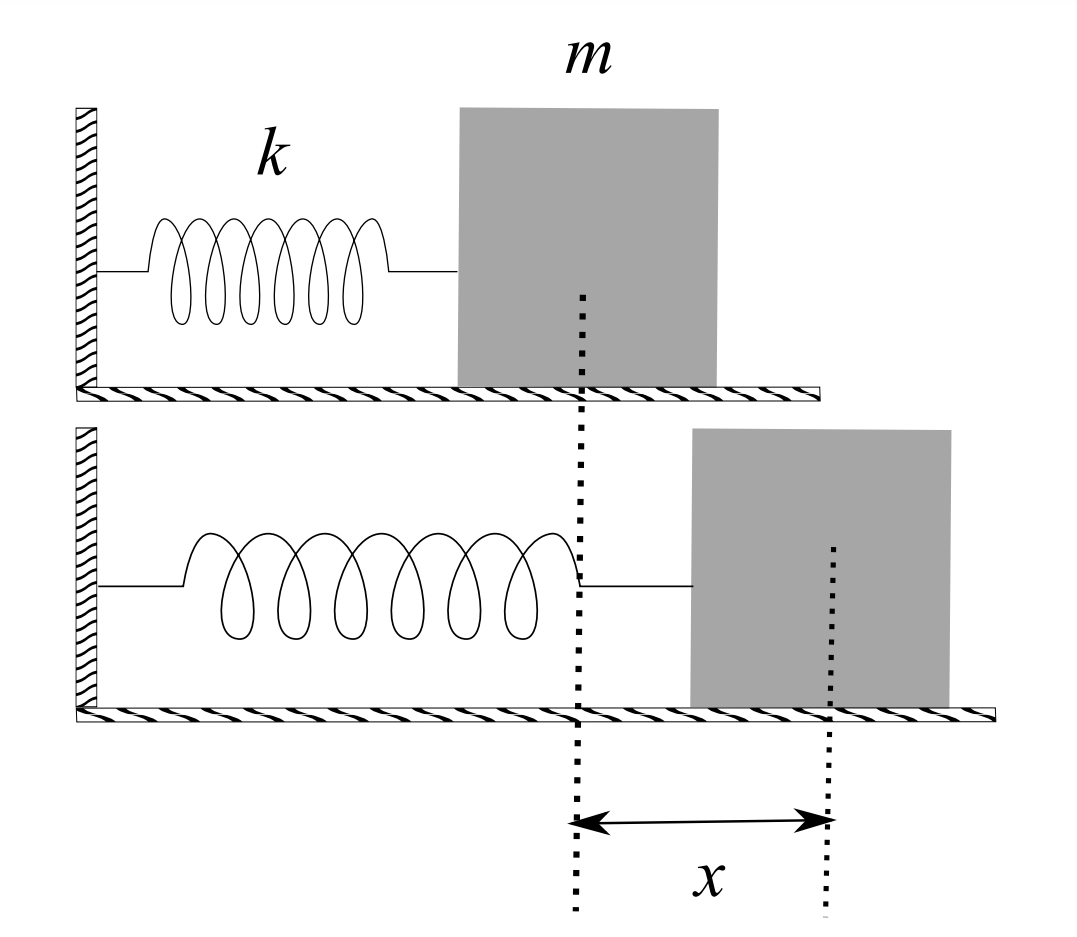
Ya hemos visto el simple problema de una masa en un resorte como se muestra en la Figura 2.1. Recordemos que la fuerza neta en este caso es la fuerza restauradora de la primavera dada por la Ley de Hooke,
\[F_{S}=-k x \nonumber \]
donde\(k>0\) es la constante de resorte y\(x\) es el alargamiento del resorte. Cuando la constante elástica es positiva, la fuerza elástica es negativa y cuando la constante elástica es negativa la fuerza del resorte es positiva. La ecuación para el movimiento armónico simple para el sistema masa-resorte fue dada por
\[m \ddot{x}+k x=0\nonumber \]
Esta ecuación de segundo orden puede escribirse como un sistema de dos ecuaciones de primer orden en términos de la posición y velocidad desconocidas. Primero establecemos\(y=\dot{x}\). Señalando eso\(\ddot{x}=\dot{y}\), reescribimos la ecuación de segundo orden en términos de\(x\) y\(\dot{y}\). Así, tenemos
\[\begin{array}{r} \dot{x}=y \\ \dot{y}=-\dfrac{k}{m} x \end{array} \label{6.1} \]
Se pueden observar sistemas de masa-resorte más complicados. Considera dos bloques unidos con dos muelles como en la Figura\(\PageIndex{2}.\) En este caso aplicamos la segunda ley de Newton para cada bloque. Designaremos los alargamientos de cada resorte desde el equilibrio como\(x_{1}\) y\(x_{2} .\) Estos se muestran en la Figura\(\PageIndex{2}.\)
Para la masa\(m_{1}\), las fuerzas que actúan sobre ella se deben a cada resorte. El primer resorte con constante de resorte\(k_{1}\) proporciona una fuerza en\(m_{1}\) de\(-k_{1} x_{1}\). El segundo resorte se estira, o se comprime, en función de las ubicaciones relativas de las dos masas. Entonces, el segundo resorte ejercerá una fuerza sobre\(m_{1}\) de\(k_{2}\left(x_{2}-x_{1}\right)\).
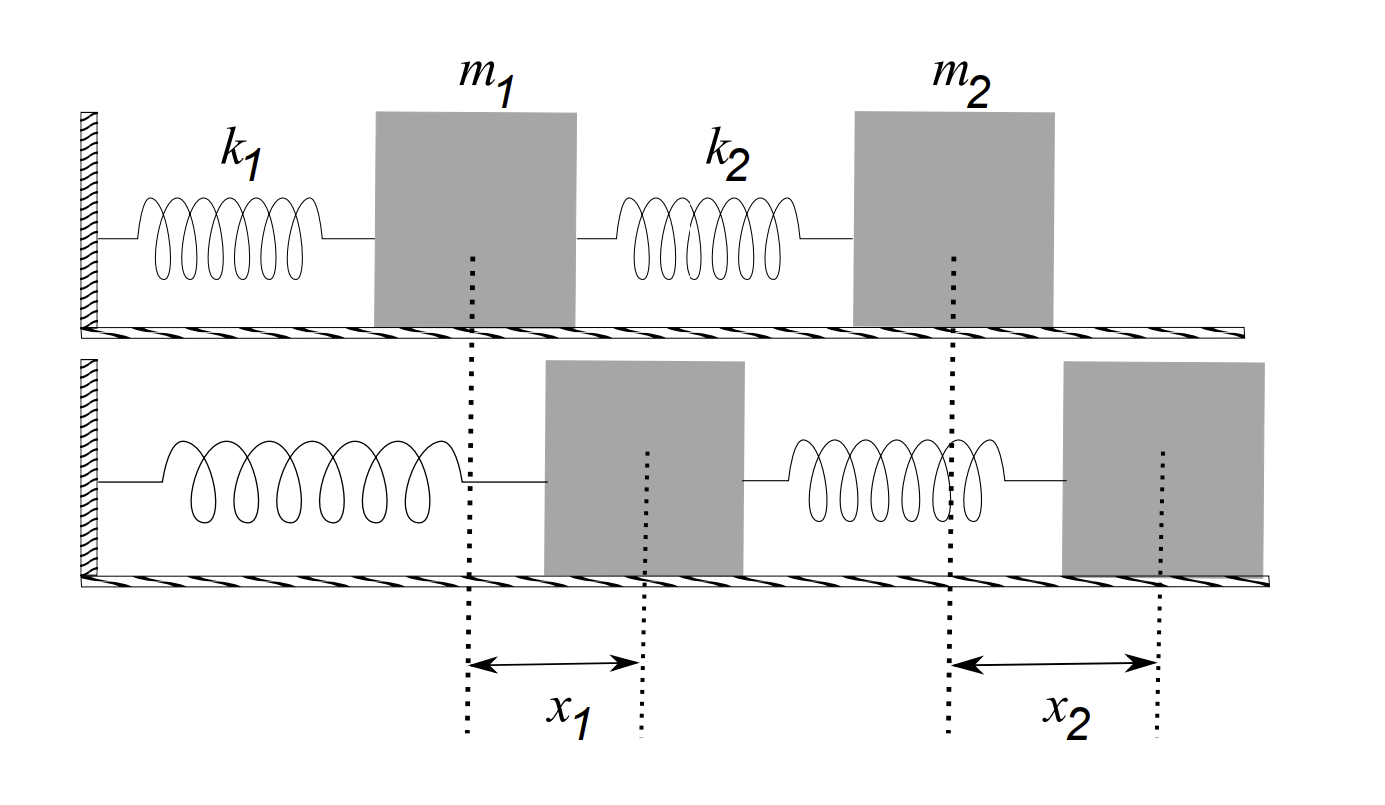
Del mismo modo, la única fuerza que actúa directamente sobre la masa\(m_{2}\) es proporcionada por la fuerza restauradora del resorte 2. Entonces, esa fuerza viene dada por\(-k_{2}\left(x_{2}-x_{1}\right)\). El lector debe pensar en los signos en cada caso.
Armando todo esto, aplicamos la Segunda Ley de Newton a ambas masas. Obtenemos las dos ecuaciones
\[ \begin{aligned} &m_{1} \ddot{x}_{1}=-k_{1} x_{1}+k_{2}\left(x_{2}-x_{1}\right) \\ &m_{2} \ddot{x}_{2}=-k_{2}\left(x_{2}-x_{1}\right) \end{aligned} \label{6.2} \]
Así, vemos que tenemos un sistema acoplado de dos ecuaciones diferenciales de segundo orden. Cada ecuación depende de las incógnitas\(x_{1}\) y\(x_{2}\).
Se puede reescribir este sistema de dos ecuaciones de segundo orden como un sistema de cuatro ecuaciones de primer orden dejando\(x_{3}=\dot{x}_{1}\) y\(x_{4}=\dot{x}_{2}\). Esto lleva al sistema
\[\dot{x}_{1}=x_{3}\nonumber \]
\[ \begin{aligned} \dot{x}_{2} &=x_{4} \\ \dot{x}_{3} &=-\dfrac{k_{1}}{m_{1}} x_{1}+\dfrac{k_{2}}{m_{1}}\left(x_{2}-x_{1}\right) \\ \dot{x}_{4} &=-\dfrac{k_{2}}{m_{2}}\left(x_{2}-x_{1}\right) \end{aligned} \label{6.3} \]
Como veremos en el próximo capítulo, este sistema se puede escribir de manera más compacta en forma matricial:
\[\dfrac{d}{d t}\left(\begin{array}{c} x_{1} \\ x_{2} \\ x_{3} \\ x_{4} \end{array}\right)=\left(\begin{array}{cccc} 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ -\dfrac{k_{1}+k_{2}}{m_{1}} & \dfrac{k_{2}}{m_{1}} & 0 & 0 \\ \dfrac{k_{2}}{m_{2}} & -\dfrac{k_{2}}{m_{2}} & 0 & 0 \end{array}\right)\left(\begin{array}{l} x_{1} \\ x_{2} \\ x_{3} \\ x_{4} \end{array}\right) \nonumber \]
Podemos resolver este sistema de ecuaciones de primer orden usando métodos matriciales. Sin embargo, primero tendremos que recordar algunas cosas del álgebra lineal. Esto se hará en el próximo capítulo. Por ahora, volveremos a sistemas más simples y exploraremos el comportamiento de las soluciones típicas en sistemas planos.
6.1.2: Sistemas Planares
CONSIDERAMOS AHORA EJEMPLOS de resolver un sistema acoplado de ecuaciones diferenciales de primer orden en el plano. Nos centraremos en la teoría de sistemas lineales con coeficientes constantes. Comprender estos sistemas simples ayudará en el estudio de los sistemas no lineales, los cuales contienen comportamientos mucho más interesantes, como el inicio del caos. En el siguiente capítulo volveremos a estos sistemas y describiremos un enfoque matricial para obtener las soluciones.
Una forma general para los sistemas de primer orden en el plano viene dada por un sistema de dos ecuaciones para incógnitas\(x(t)\) y\(y(t)\):
\[ \begin{aligned} &x^{\prime}(t)=P(x, y, t) \\ &y^{\prime}(t)=Q(x, y, t) \end{aligned} \label{6.5} \]
Un sistema autónomo es aquel en el que no existe una dependencia explícita del tiempo:
Sistemas autónomos.
\[ \begin{aligned} & x^{\prime}(t)=P(x, y) \\ & y^{\prime}(t)=Q(x, y) . \end{aligned} \label{6.6} \]
De lo contrario el sistema se llama no autónomo.
Un sistema lineal toma la forma
\[ \begin{aligned} &x^{\prime}=a(t) x+b(t) y+e(t) \\ &y^{\prime}=c(t) x+d(t) y+f(t) \end{aligned} \label{6.7} \]
Un sistema lineal homogéneo da como resultado cuando\(e(t)=0\) y\(f(t)=0 .\)
Un sistema lineal de coeficientes constantes de ecuaciones diferenciales de primer orden viene dado por
\[\begin{aligned} &x^{\prime}=a x+b y+e \\ &y^{\prime}=c x+d y+f \end{aligned} \label{6.8} \]
Un sistema lineal y homogéneo de ecuaciones diferenciales de primer orden de coeficientes constantes en el plano.
Nos centraremos en sistemas lineales y homogéneos de ecuaciones diferenciales de primer orden de coeficientes constantes:
\[ \begin{array}{|l} x^{\prime}=a x+b y \\ y^{\prime}=c x+d y. \end{array} \label{6.9} \]
Como veremos más adelante, tales sistemas pueden resultar por una simple traducción de las funciones desconocidas. Se dice que estas ecuaciones están acopladas si cualquiera\(b \neq 0\) o\(c \neq 0\).
Comenzamos por señalar que la Ecuación del sistema\(\PageIndex{9}\) puede reescribirse como una ecuación diferencial lineal de coeficiente constante de segundo orden, que ya sabemos resolver. Diferenciamos la primera ecuación en Ecuación del sistema\(\PageIndex{9}\) y reemplazamos sistemáticamente las ocurrencias de\(y\) y\(y^{\prime}\), ya que también sabemos por la primera ecuación que\(y=\dfrac{1}{b}\left(x^{\prime}-a x\right)\). Así, tenemos
\[ \begin{aligned} x^{\prime \prime} &=a x^{\prime}+b y^{\prime} \\ &=a x^{\prime}+b(c x+d y) \\ &=a x^{\prime}+b c x+d\left(x^{\prime}-a x\right) \end{aligned} \label{6.10} \]
Reescribiendo la última línea, tenemos
\[x^{\prime \prime}-(a+d) x^{\prime}+(a d-b c) x=0 \nonumber \]
Se trata de una ecuación diferencial ordinaria lineal, homogénea, de coeficiente constante. Sabemos que podemos resolver esto mirando primero las raíces de la ecuación característica
\[r^{2}-(a+d) r+a d-b c=0 \nonumber \]
y anotar la solución general apropiada para\(x(t)\). Entonces podemos encontrar\(y(t)\) usando
Ecuación\(\PageIndex{9}\):
\[y=\dfrac{1}{b}\left(x^{\prime}-a x\right)\nonumber \]
Ahora demostramos esto para un ejemplo específico.
Considerar el sistema de ecuaciones diferenciales
\[ \begin{aligned} &x^{\prime}=-x+6 y \\ &y^{\prime}=x-2 y \end{aligned} \label{6.13} \]
Llevando a cabo los pasos antes señalados, tenemos eso\(x^{\prime \prime}+3 x^{\prime}-4 x=0\). Esto se puede mostrar de la siguiente manera:
\[ \begin{aligned} x^{\prime \prime} &=-x^{\prime}+6 y^{\prime} \\ &=-x^{\prime}+6(x-2 y) \\ &=-x^{\prime}+6 x-12\left(\dfrac{x^{\prime}+x}{6}\right) \\ &=-3 x^{\prime}+4 x \end{aligned} \label{6.14} \]
La ecuación diferencial resultante tiene una ecuación característica de\(r^{2}+3 r-4=0\). Las raíces de esta ecuación son\(r=1,-4\). Por lo tanto,\(x(t)=c_{1} e^{t}+c_{2} e^{-4 t}\). Pero, todavía necesitamos\(y(t)\). Desde la primera ecuación del sistema tenemos
\[y(t)=\dfrac{1}{6}\left(x^{\prime}+x\right)=\dfrac{1}{6}\left(2 c_{1} e^{t}-3 c_{2} e^{-4 t}\right) \nonumber \]
Así, la solución al sistema es
\[ \begin{aligned} &x(t)=c_{1} e^{t}+c_{2} e^{-4 t} \\ &y(t)=\dfrac{1}{3} c_{1} e^{t}-\dfrac{1}{2} c_{2} e^{-4 t} \end{aligned} \label{6.15} \]
A veces uno necesita condiciones iniciales. Para estos sistemas especificaríamos condiciones como\(x(0)=x_{0}\) y\(y(0)=y_{0}\). Estos permitirían la determinación de las constantes arbitrarias como antes.
Resolviendo sistemas con condiciones iniciales.
Resolver
\[ \begin{aligned} &x^{\prime}=-x+6 y \\ &y^{\prime}=x-2 y \end{aligned} \label{6.16} \]
dado\(x(0)=2, y(0)=0\).
Ya tenemos la solución general de este sistema en Ecuación\(\PageIndex{15}\). Insertando las condiciones iniciales, tenemos
\[ \begin{aligned} &2=c_{1}+c_{2} \\ &0=\dfrac{1}{3} c_{1}-\dfrac{1}{2} c_{2} \end{aligned} \label{6.17} \]
Resolviendo\(c_{1}\) y\(c_{2}\) da\(c_{1}=6 / 5\) y\(c_{2}=4 / 5 .\) Por lo tanto, la solución del problema de valor inicial es
\[ \begin{aligned} &x(t)=\dfrac{2}{5}\left(3 e^{t}+2 e^{-4 t}\right) \\ &y(t)=\dfrac{2}{5}\left(e^{t}-e^{-4 t}\right) \end{aligned}\label{6.18} \]
6.1.3: Soluciones de equilibrio y comportamientos cercanos
EN EL ESTUDIO DE SISTEMAS DE ECUACIONES DIFERENCIALES, muchas veces es útil estudiar el comportamiento de las soluciones sin obtener una forma algebraica para la solución. Esto se hace explorando soluciones de equilibrio y soluciones cercanas a soluciones de equilibrio. Dichas técnicas se verán útiles posteriormente en el estudio de sistemas no lineales.
Comenzamos esta sección estudiando soluciones de equilibrio de la Ecuación del sistema\(\PageIndex{8}\). Para soluciones de equilibrio el sistema no cambia en el tiempo. Por lo tanto, las soluciones de equilibrio satisfacen las ecuaciones\(x^{\prime}=0\) y\(y^{\prime}=0\). Por supuesto, esto sólo puede suceder para soluciones constantes. Dejar\(x_{0}\) y\(y_{0}\) ser las soluciones de equilibrio (constante). Entonces,\(x_{0}\) y\(y_{0}\) debe satisfacer el sistema
Soluciones de equilibrio.
\[ \begin{aligned} 0 &=a x_{0}+b y_{0}+e \\ 0 &=c x_{0}+d y_{0}+f \end{aligned} \label{6.19} \]
Este es un sistema lineal de ecuaciones algebraicas no homogéneas. Uno solo tiene una solución única cuando el determinante del sistema no es cero, es decir,\(a d-b c \neq 0 .\) Usando la regla (determinante) de Cramer para resolver tales sistemas, tenemos
\[x_{0}=-\dfrac{\left|\begin{array}{ll}e & b \\ f & d\end{array}\right|}{\left|\begin{array}{ll}a & b \\ c & d\end{array}\right|}, \quad y_{0}=-\dfrac{\left|\begin{array}{ll}a & e \\ c & f\end{array}\right|}{\left|\begin{array}{ll}a & b \\ c & d\end{array}\right|} \nonumber \]
Si el sistema es homogéneo\(e=f=0\), entonces tenemos que el origen es la solución de equilibrio; es decir,\(\left(x_{0}, y_{0}\right)=(0,0)\). Muchas veces tendremos este caso ya que siempre se puede hacer un cambio de coordenadas de\((x, y)\) a\((u, v)\) por\(u=x-x_{0}\) y\(v=y-y_{0} .\) Entonces,\(u_{0}=v_{0}=0 .\)
A continuación nos interesa el comportamiento de las soluciones cercanas a las soluciones de equilibrio. Posteriormente este comportamiento será útil para analizar sistemas no lineales más complicados. Veremos algunos sistemas simples que se resuelven fácilmente.
Considerar el sistema
\[ \begin{gathered} x^{\prime}=-2 x \\ y^{\prime}=-y \end{gathered} \label{6.21} \]
Se trata de un sencillo sistema desacoplado. Cada ecuación es simplemente resuelta para dar
\[x(t)=c_{1} e^{-2 t} \text { and } y(t)=c_{2} e^{-t} \nonumber \]
En este caso vemos que todas las soluciones tienden hacia el punto de equilibrio,\((0,0)\). Esto se llamará nodo estable, o sumidero.
Antes de mirar otro tipo de soluciones, exploraremos el nodo estable en el ejemplo anterior. Existen varios métodos para observar el comportamiento de las soluciones. Podemos observar las gráficas de solución de las variables dependientes versus las independientes, o podemos mirar en el\(x y\) plano -las curvas paramétricas\((x(t), y(t))\).
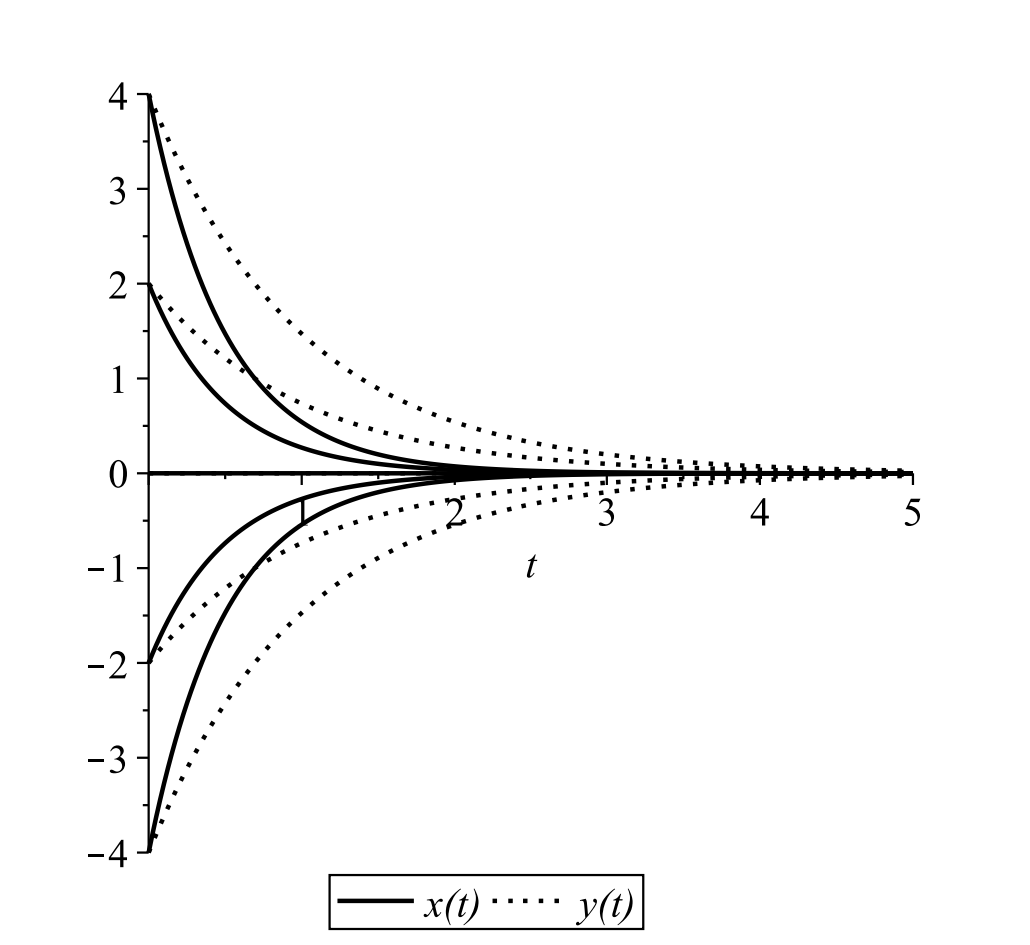
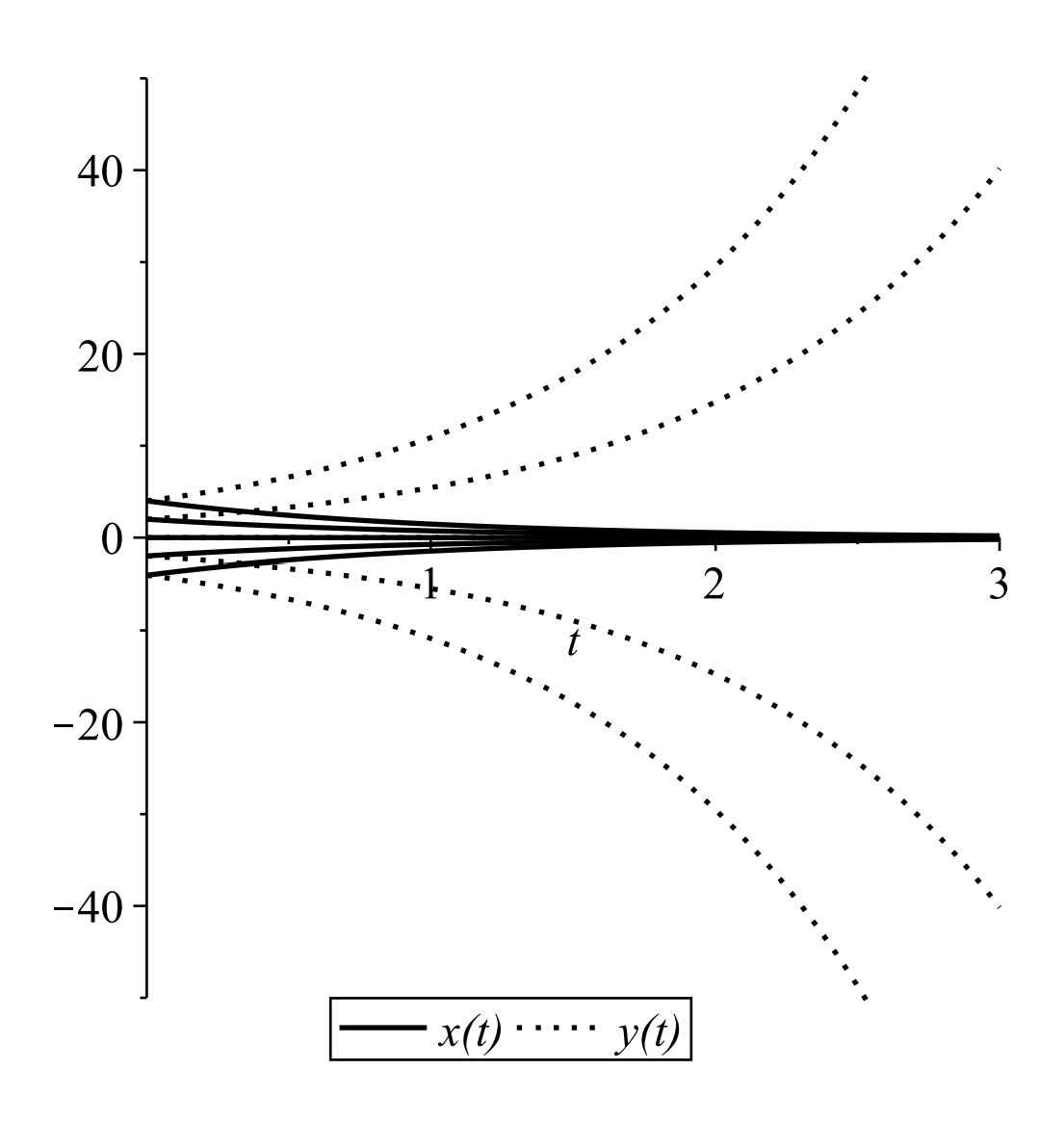
Gráficas de solución: Se puede trazar cada solución en función de un conjunto\(t\) dado de condiciones iniciales. En la Figura se muestran ejemplos\(\PageIndex{3}\) para varias condiciones iniciales. Tenga en cuenta que las soluciones decaen para casos\(t .\) especiales grandes resultan para diversas condiciones iniciales. Tenga en cuenta que para\(t=0, x(0)=c_{1}\) y\(y(0)=c_{2} .\) (Por supuesto, uno puede proporcionar condiciones iniciales en cualquier Generalmente\(t=t_{0} .\) es más fácil elegir\(t=0\) en nuestras explicaciones generales.) Si elegimos una condición inicial con\(c_{1}=0\), entonces\(x(t)=0\) para todos\(t\). Se obtienen resultados similares al configurar\(y(0)=0\).
Retrato de fase: Hay otros tipos de parcelas que pueden proporcionar información adicional sobre las soluciones aunque no podamos encontrar las soluciones exactas como podemos para estos simples ejemplos. En particular, se pueden considerar las soluciones\(x(t)\) y\(y(t)\) como las coordenadas a lo largo de una trayectoria parametrizada, o curva, en el plano:\(\mathbf{r}=(x(t), y(t))\) Tales curvas se denominan trayectorias u órbitas. El\(x y\) -plano se llama plano de fase y una colección de tales órbitas da un retrato de fase para la familia de soluciones del sistema dado.
Un método para determinar las ecuaciones de las órbitas en el plano de fase es eliminar el parámetro\(t\) entre las soluciones conocidas para obtener una relación entre\(x\) y\(y\). Dado que las soluciones son conocidas por el último ejemplo, podemos hacer esto, ya que las soluciones son conocidas. En particular, tenemos
\[x=c_{1} e^{-2 t}=c_{1}\left(\dfrac{y}{c_{2}}\right)^{2} \equiv A y^{2}. \nonumber \]
Otra forma de obtener información sobre las órbitas proviene de señalar que las pendientes de las órbitas en el\(x y\) plano están dadas por\(d y / d x\). Para sistemas autónomos, podemos escribir esta pendiente solo en términos de\(x\) y\(y\). Esto conduce a una ecuación diferencial de primer orden, que posiblemente podría resolverse analítica o numéricamente.
Primero obtendremos las órbitas para Ejemplo\(\PageIndex{3}\) resolviendo la ecuación de pendiente correspondiente. Recordemos que para trayectorias definidas paramétricamente por\(x=x(t)\) y\(y=y(t)\), tenemos de la Regla de Cadena para\(y=y(x(t))\) eso
\[\dfrac{d y}{d t}=\dfrac{d y}{d x} \dfrac{d x}{d t} \nonumber \]
Por lo tanto,
La Pendiente de una curva paramétrica.
\[\dfrac{d y}{d x}=\dfrac{\dfrac{d y}{d t}}{\dfrac{d x}{d t}} \nonumber \]
Para el sistema en Ecuación\(\PageIndex{21}\) utilizamos Ecuación\(\PageIndex{22}\) para obtener la ecuación para la pendiente en un punto de la órbita:
\[\dfrac{d y}{d x}=\dfrac{y}{2 x}\nonumber \]
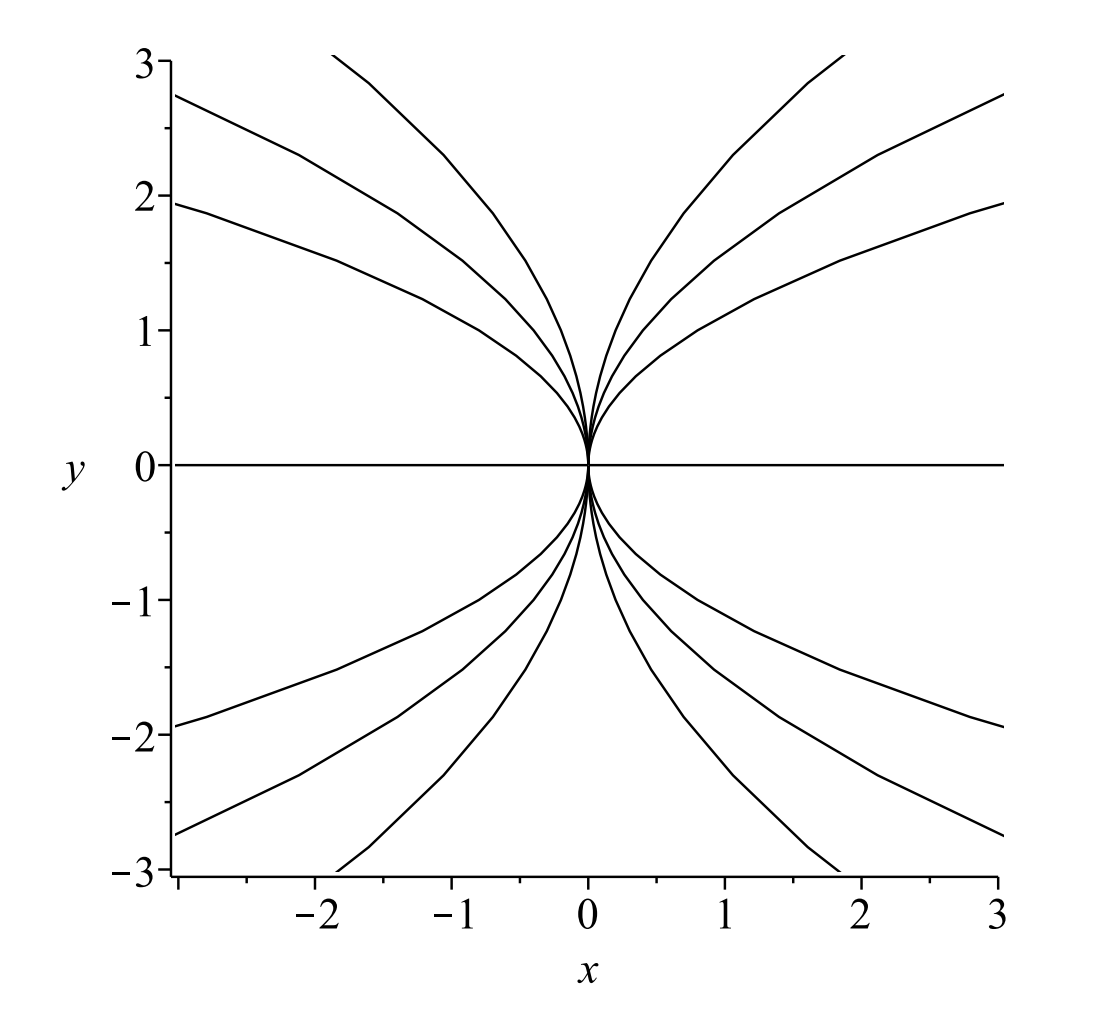
La solución general de esta ecuación diferencial de primer orden se encuentra utilizando la
separación de variables como\(x=A y^{2}\) para\(A\) una constante arbitraria. Las gráficas de estas soluciones en el plano de fase se dan en la Figura\(\PageIndex{4}\). [Tenga en cuenta que esta es la misma forma para las órbitas que habíamos obtenido anteriormente al eliminar\(t\) de la solución del sistema.]
Una vez que se tienen soluciones a las ecuaciones diferenciales, a menudo nos interesa el comportamiento a largo plazo de las soluciones. Dada una condición inicial particular\(\left(x_{0}, y_{0}\right)\), ¿cómo se comporta la solución a medida que aumenta el tiempo? Para órbitas cercanas a una solución de equilibrio, ¿las soluciones tienden hacia, o alejándose de, el punto de equilibrio? La respuesta es obvia cuando uno tiene las soluciones exactas\(x(t)\) y\(y(t)\). No obstante, no siempre es así.
Consideremos el ejemplo anterior para las condiciones iniciales en el primer cuadrante del plano de fase. Por un punto en el primer cuadrante tenemos que
\[d x / d t=-2 x<0\nonumber \]
lo que significa que como\(t \rightarrow \infty, x(t)\) obtener más negativo. Del mismo modo,
\[d y / d t=-y<0 \nonumber \]
indicando que también\(y(t)\) se está haciendo más pequeño para este problema. Así, estas órbitas tienden hacia el origen como\(t \rightarrow \infty\). Esta información cualitativa se obtuvo sin depender de las soluciones conocidas al problema.
Campos de dirección: Otra forma de determinar el comportamiento de las soluciones del sistema de ecuaciones diferenciales es dibujar el campo de dirección. Un campo de dirección es un campo vectorial en el que se trazan flechas en la dirección de tangentes a las órbitas en puntos seleccionados en el plano. Esto se hace porque las pendientes de las líneas tangentes están dadas por\(d y / d x\). Para la Ecuación general del sistema\(\PageIndex{9}\), la pendiente es
\[\dfrac{d y}{d x}=\dfrac{c x+d y}{a x+b y}\nonumber \]
Se trata de una ecuación diferencial de primer orden que se puede resolver como se muestra en los siguientes ejemplos.
Dibuja el campo de dirección para Ejemplo\(\PageIndex{3}\).
Podemos usar software para dibujar campos de dirección. Sin embargo, uno puede bosquejar estos campos a mano. Tenemos que la pendiente de la tangente en este punto viene dada por
\[\dfrac{d y}{d x}=\dfrac{-y}{-2 x}=\dfrac{y}{2 x} \nonumber \]
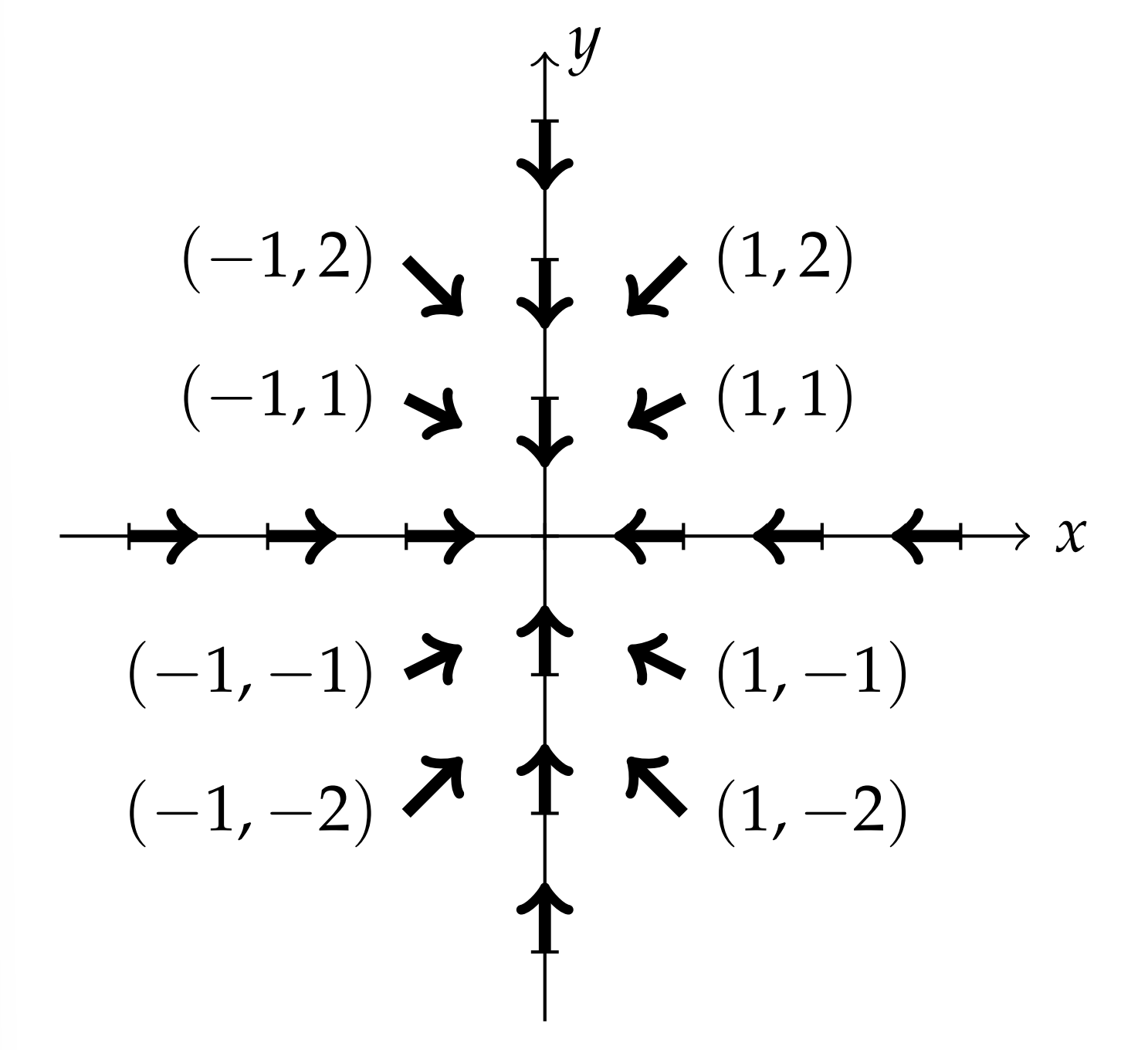
Por cada punto del plano se dibuja un trozo de línea tangente con esta pendiente. En la Figura\(\PageIndex{5}\) mostramos algunos de estos. Para\((x, y)=(1,1)\) la pendiente es\(d y / d x=1 / 2 .\) Así, dibujamos una flecha con pendiente\(1 / 2\) en este punto. De la Ecuación del sistema\(\PageIndex{21}\), tenemos eso\(x^{\prime}\) y ambos\(y^{\prime}\) son negativos en este punto. Por lo tanto, el vector apunta hacia abajo y hacia la izquierda.
Podemos hacer esto por varios puntos, como se muestra en la Figura\(\PageIndex{5}.\) A veces uno puede esbozar rápidamente vectores con la misma pendiente. Para este ejemplo, cuando\(y=0\), la pendiente es cero y cuando\(x=0\) la pendiente es infinita. Entonces, se pueden proporcionar varios vectores. Dichos vectores son tangentes a curvas conocidas como isoclinas en las que son\(\dfrac{d y}{d x}=\) constantes.
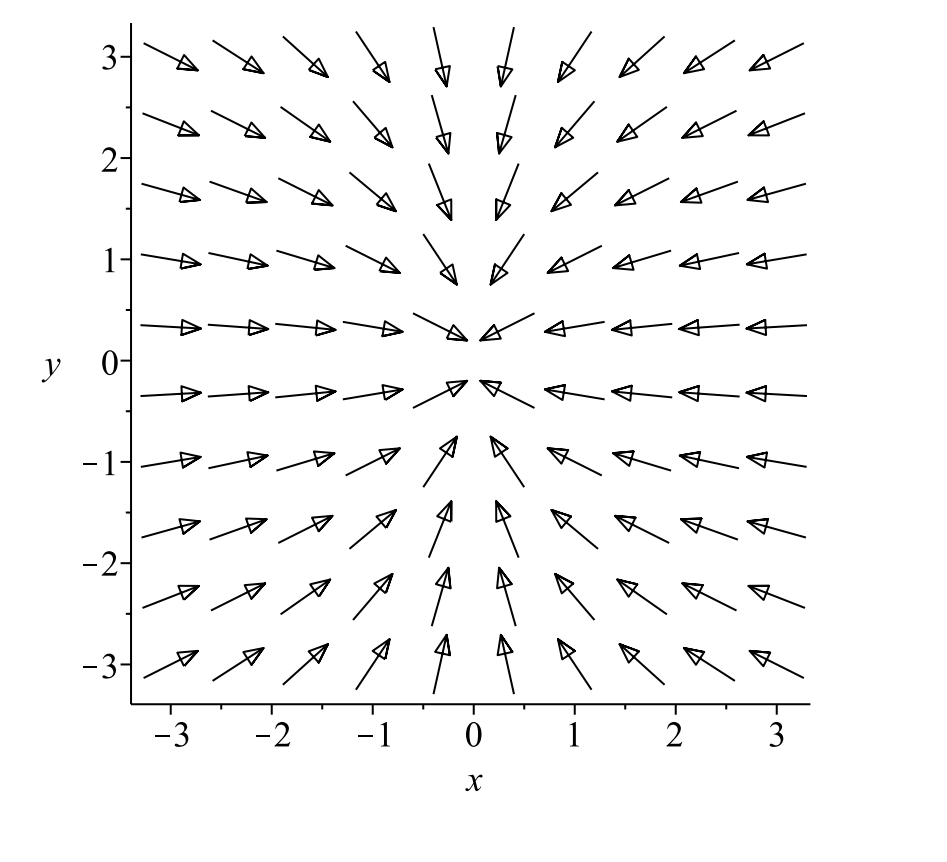
A menudo es difícil proporcionar un boceto preciso de un campo de dirección. El software de computadora se puede utilizar para proporcionar una mejor interpretación. Por ejemplo\(\PageIndex{3}\) el campo de dirección se muestra en la Figura\(\PageIndex{6}\). Mirando este campo de dirección, se puede comenzar a “ver” las órbitas siguiendo los vectores tangentes.
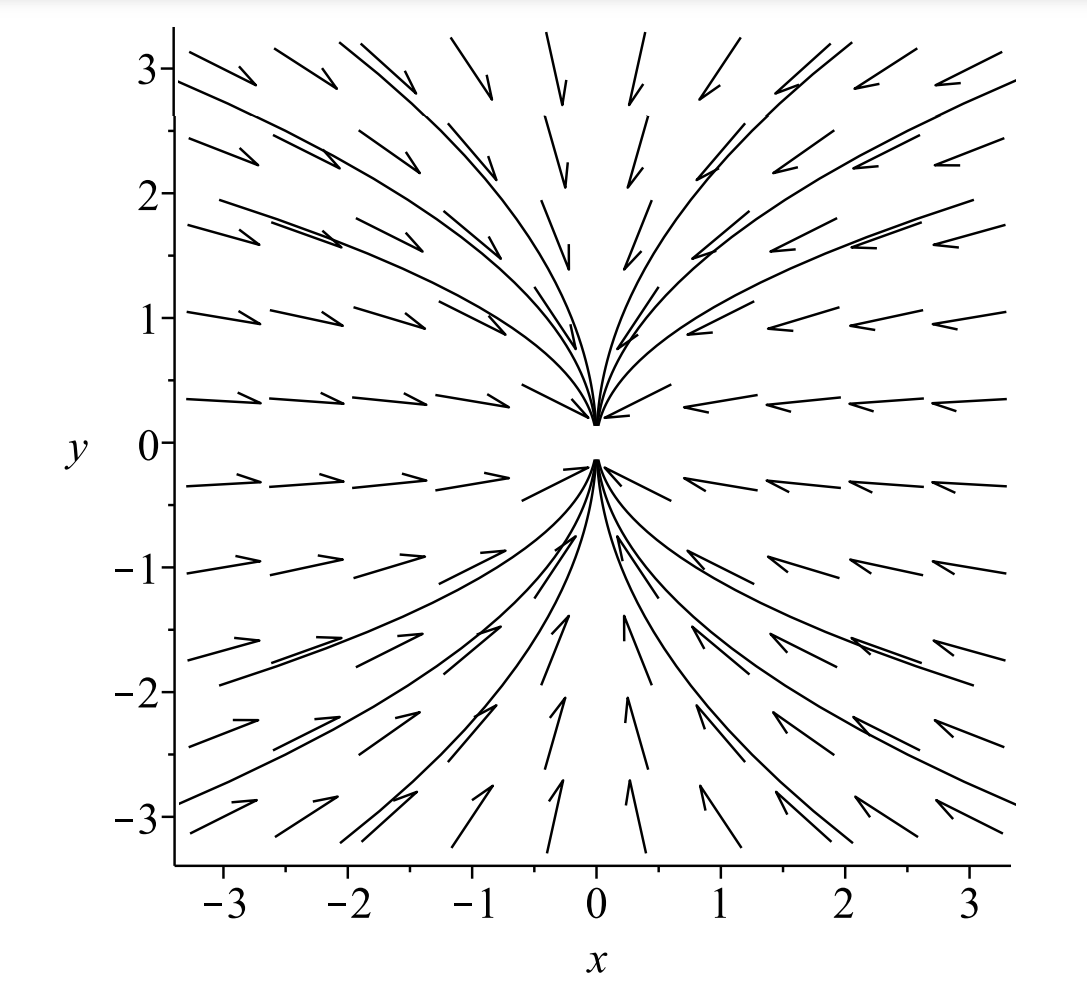
Por supuesto, se pueden superponer las órbitas en el campo de dirección. Esto se muestra en la Figura\(\PageIndex{7}\). ¿Son estos los patrones que viste en la Figura\(\PageIndex{6}\)?
En este ejemplo vemos que todas las órbitas “fluyen” hacia el origen, o punto de equilibrio. Nuevamente, este es un ejemplo de lo que se llama un nodo estable o un sumidero. (Imagínese lo que le sucede al agua en un fregadero cuando el desagüe está desenchufado).
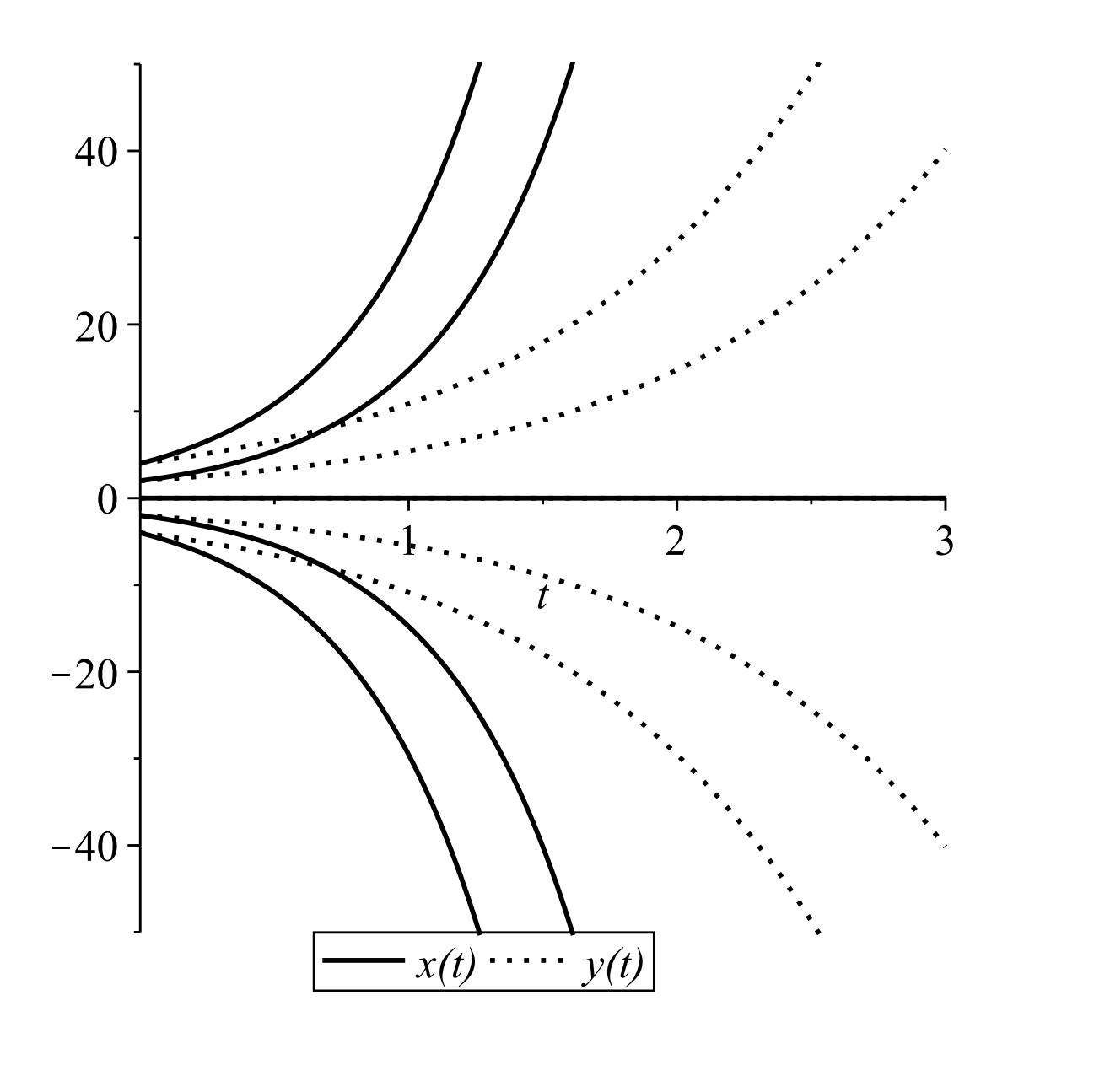
Este es otro sistema desacoplado. Las soluciones se obtienen de nuevo simplemente por integración. Tenemos eso\(x(t)=c_{1} e^{-t}\) y\(y(t)=c_{2} e^{t} .\) aquí tenemos que\(x\) decae a medida que\(t\) se hace grande y\(y\) aumenta a medida que\(t\) se agranda. En particular, si uno recoge las condiciones iniciales con\(c_{2}=0\), entonces las órbitas siguen el\(x\) eje -hacia el origen. Para los puntos iniciales con\(c_{1}=0\), las órbitas que se originan en el\(y\) eje -fluirán alejándose del origen. Por supuesto, en estos casos el origen es un punto de equilibrio y una vez en equilibrio, uno permanece ahí.
De hecho, sólo hay una línea sobre la que escoger las condiciones iniciales de tal manera que la órbita conduzca hacia el punto de equilibrio. No importa lo pequeño\(c_{2}\) que sea, tarde o temprano, el término de crecimiento exponencial dominará la solución. Se puede ver este comportamiento en la Figura\(\PageIndex{8}\)\).
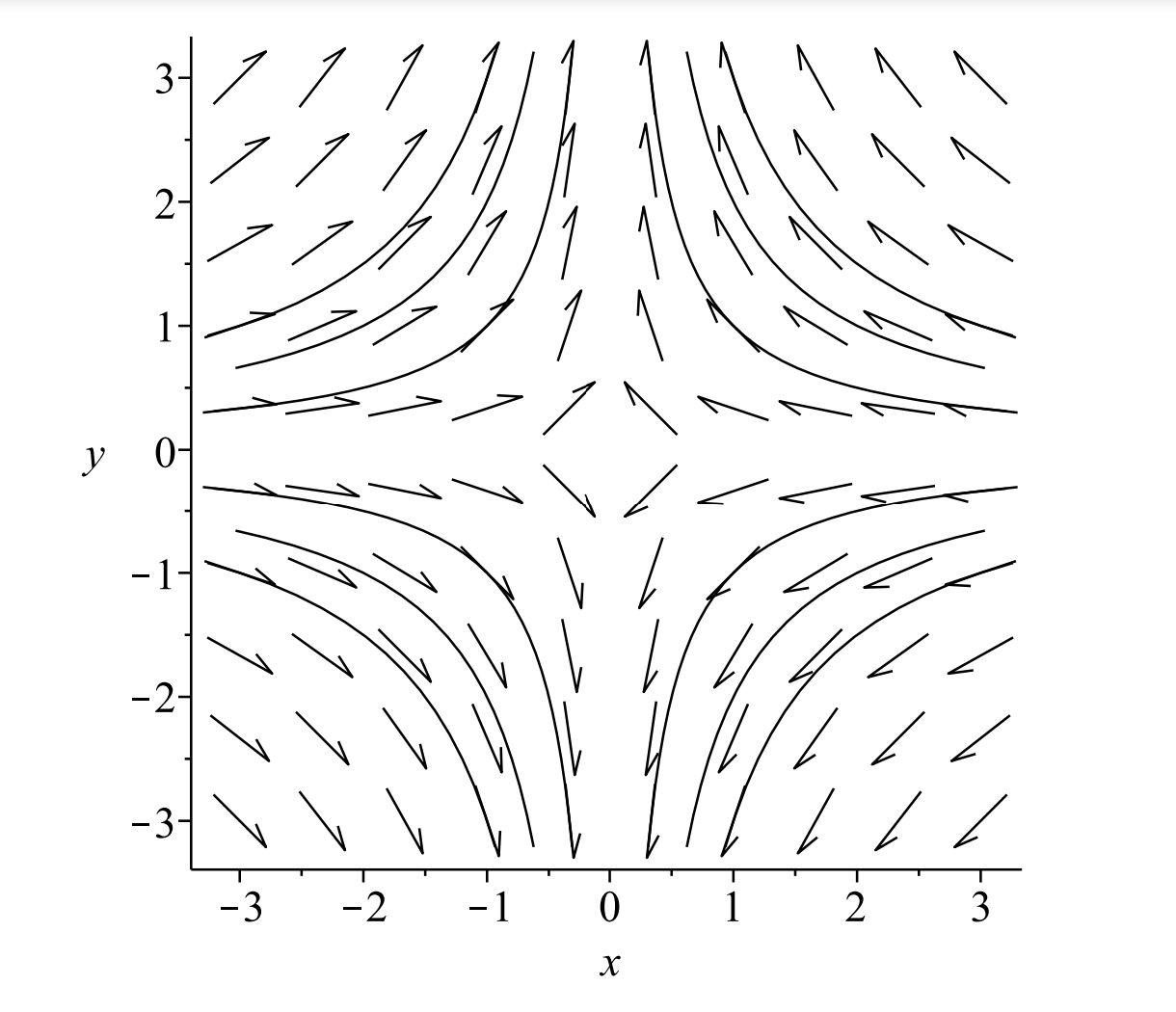
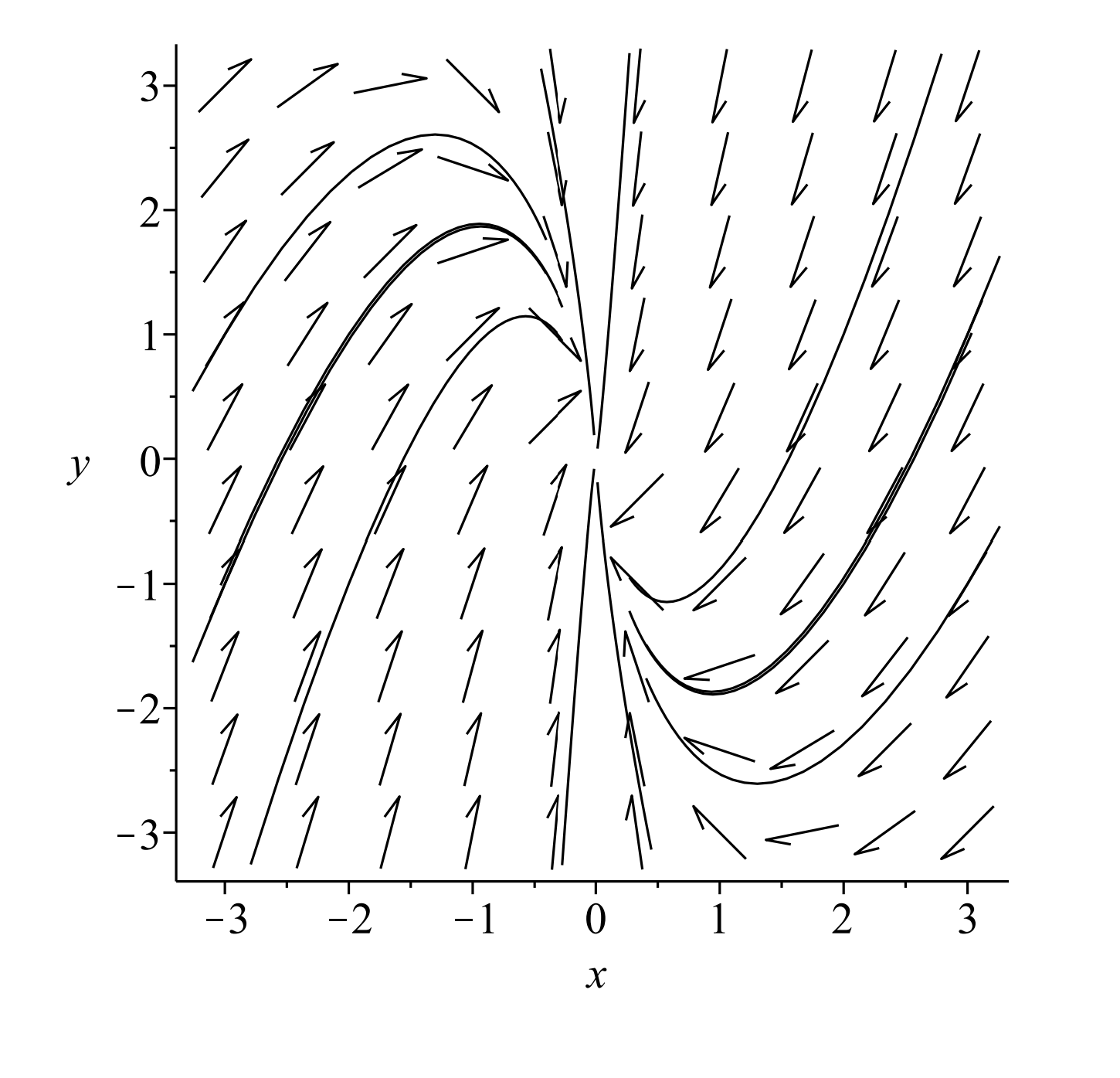
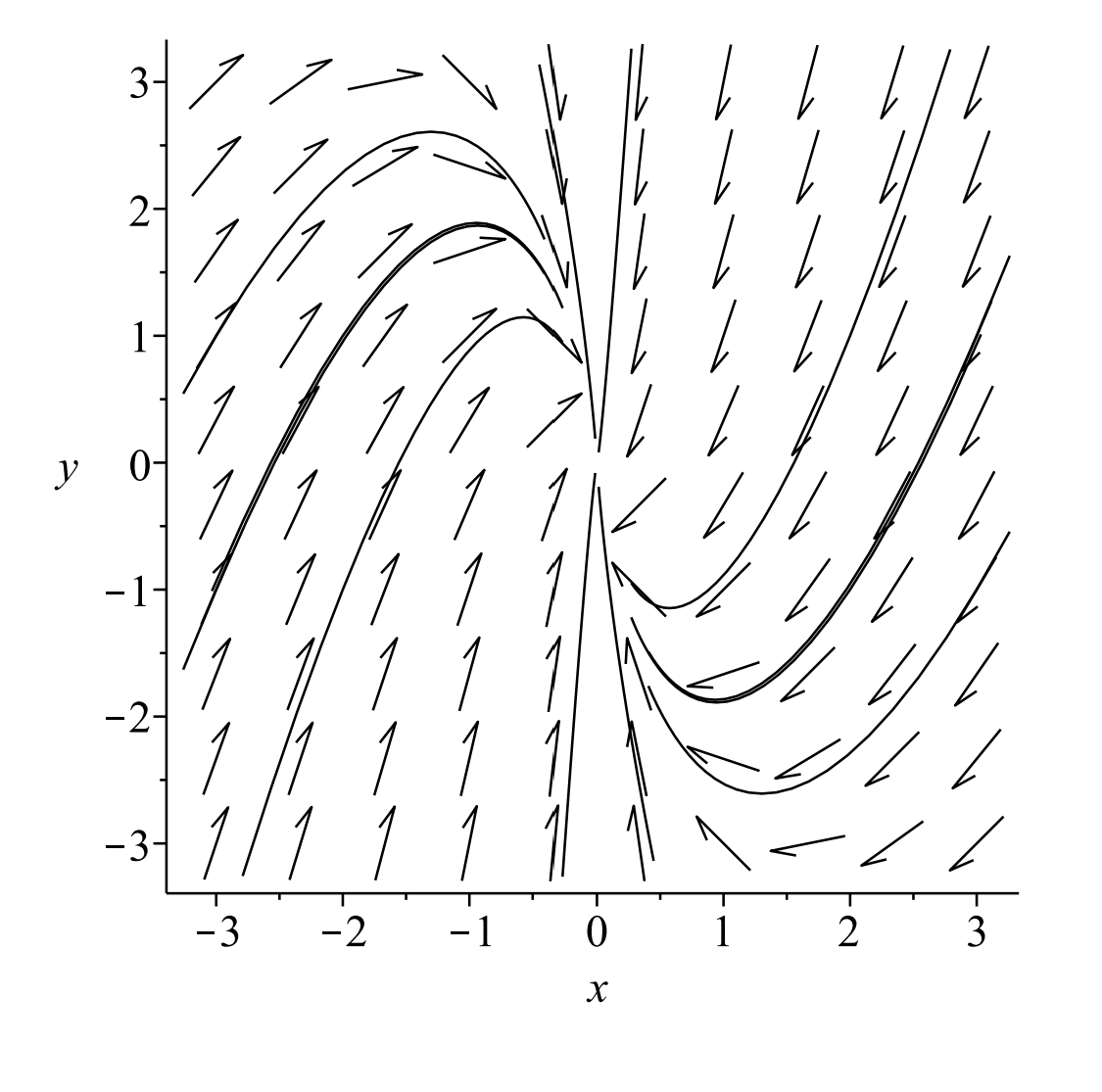
Considerar el sistema
\[ \begin{aligned} &x^{\prime}=-x \\ &y^{\prime}=y. \end{aligned} \label{6.23} \]
Similar al primer ejemplo, podemos observar parcelas de soluciones órbitas en el plano de fase. Estas son dadas por Figuras\(\PageIndex{8} - \PageIndex{9}.\) Las órbitas se pueden obtener del sistema como
\[\dfrac{d y}{d x}=\dfrac{d y / d t}{d x / d t}=-\dfrac{y}{x} \nonumber \]
La solución es\(y=\dfrac{A}{x}\). Para diferentes valores de\(A \neq 0\) obtenemos una familia de hipérbolas. Estas son las mismas curvas que se podrían obtener para las curvas de nivel de una superficie conocida como superficie de sillín,\(z=x y\). Así, este tipo de punto de equilibrio se clasifica como un punto de sillín. A partir del retrato de fase podemos verificar que hay muchas órbitas que alejan del origen (punto de equilibrio), pero hay una línea de condiciones iniciales que conduce al origen y que es el\(x\) eje -eje. En este caso, la línea de condiciones iniciales viene dada por el\(x\) eje -.
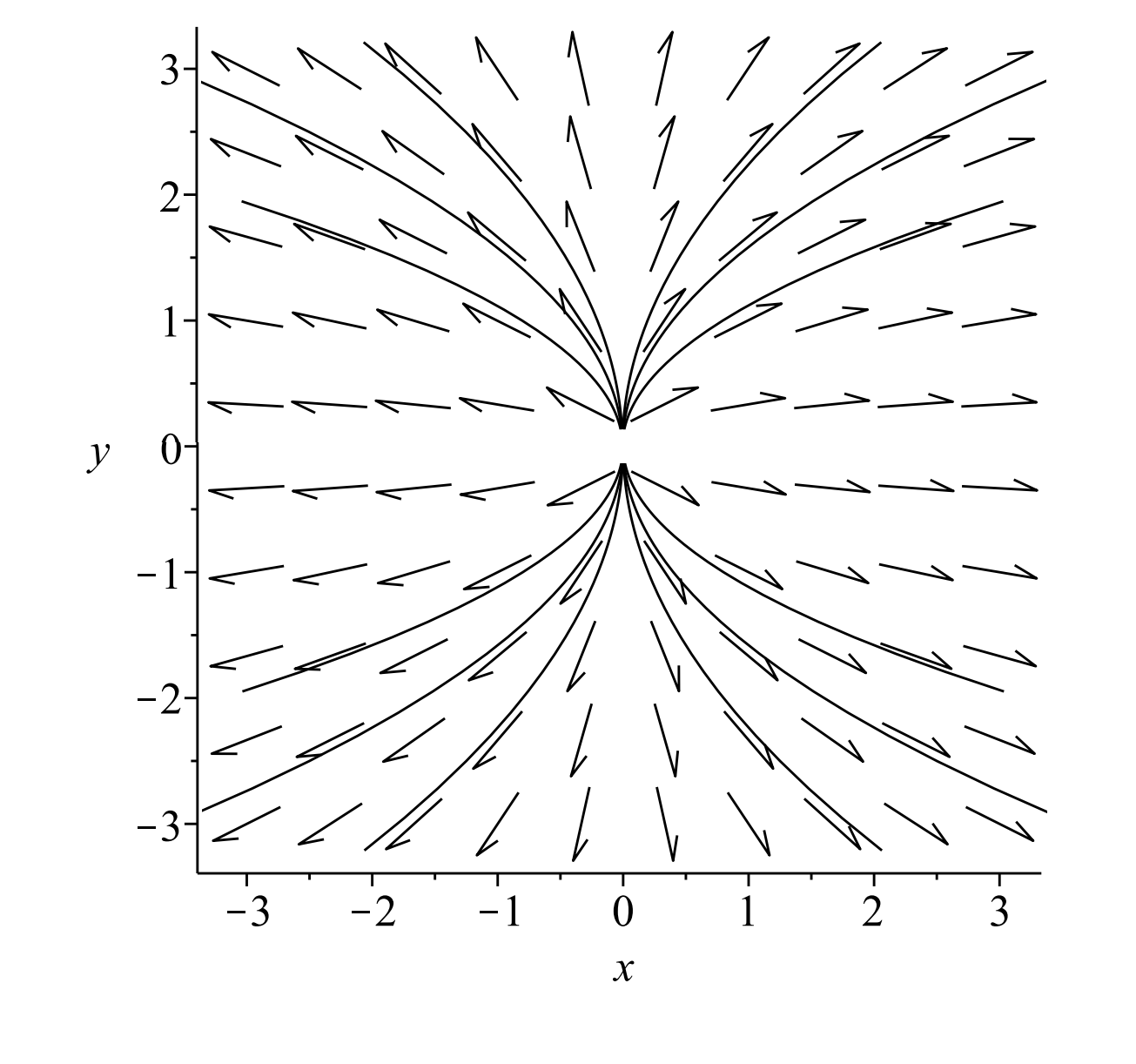
\[\begin{aligned} &x^{\prime}=2 x \\ &y^{\prime}=y. \end{aligned} \label{6.24} \]
Este ejemplo es similar al Ejemplo\(\PageIndex{3}\). Las soluciones se obtienen reemplazando\(t\) con\(-t\). Las soluciones, órbitas y campos de dirección se pueden ver en las figuras\(\PageIndex{10} - \PageIndex{11}\). Esto vuelve a ser un nodo, pero todas las órbitas se alejan del punto de equilibrio. Se llama nodo inestable o fuente.
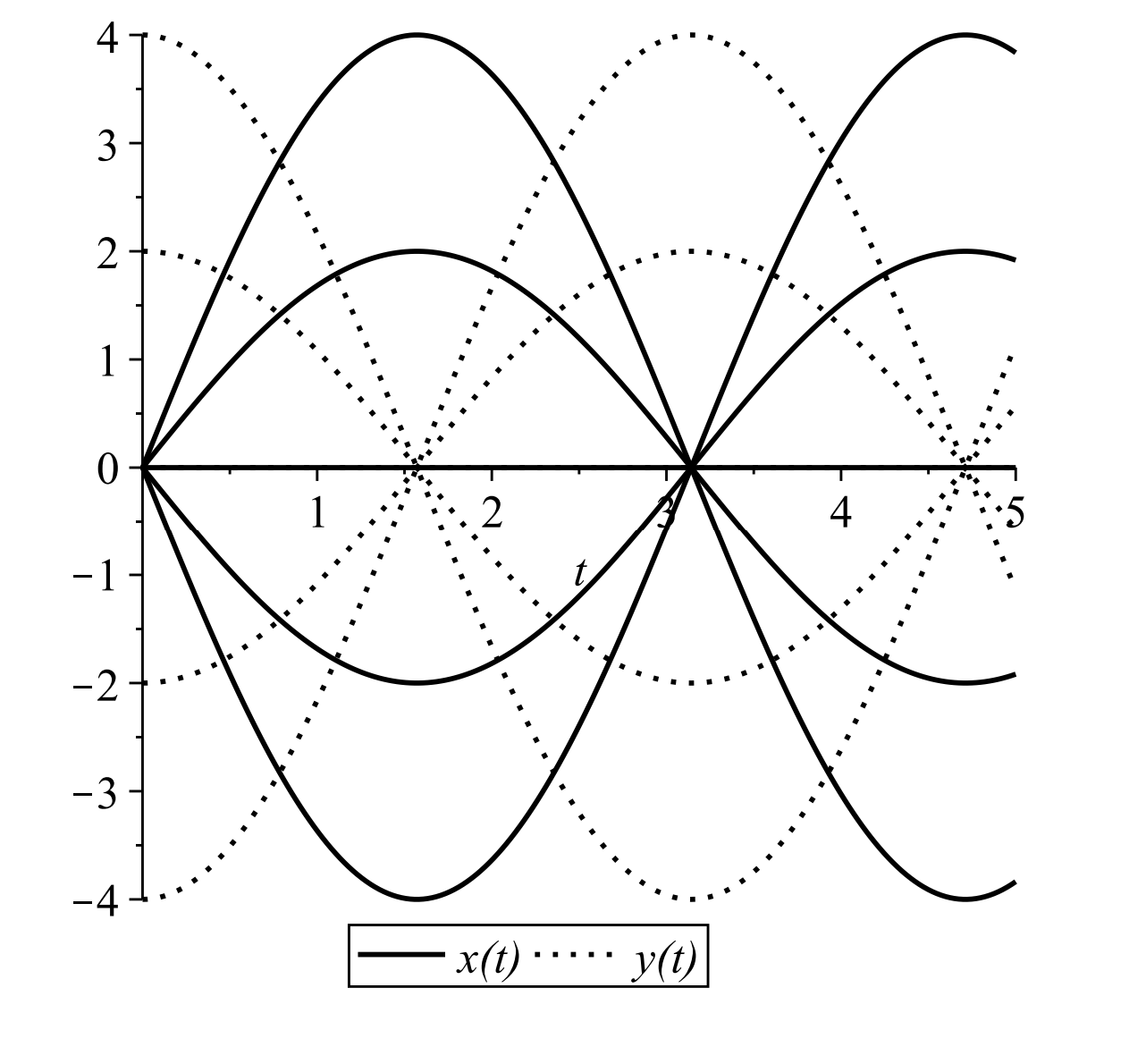
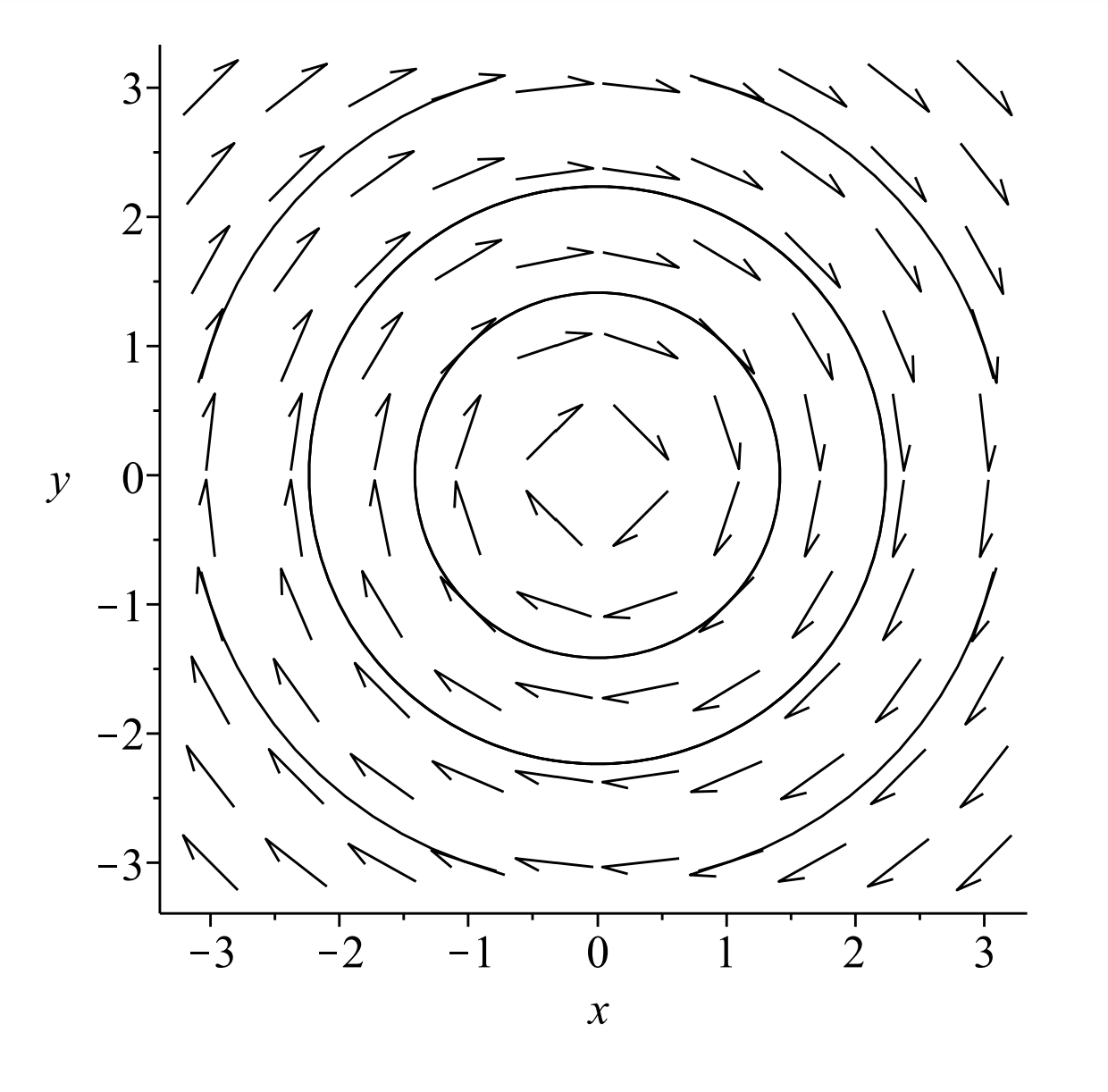
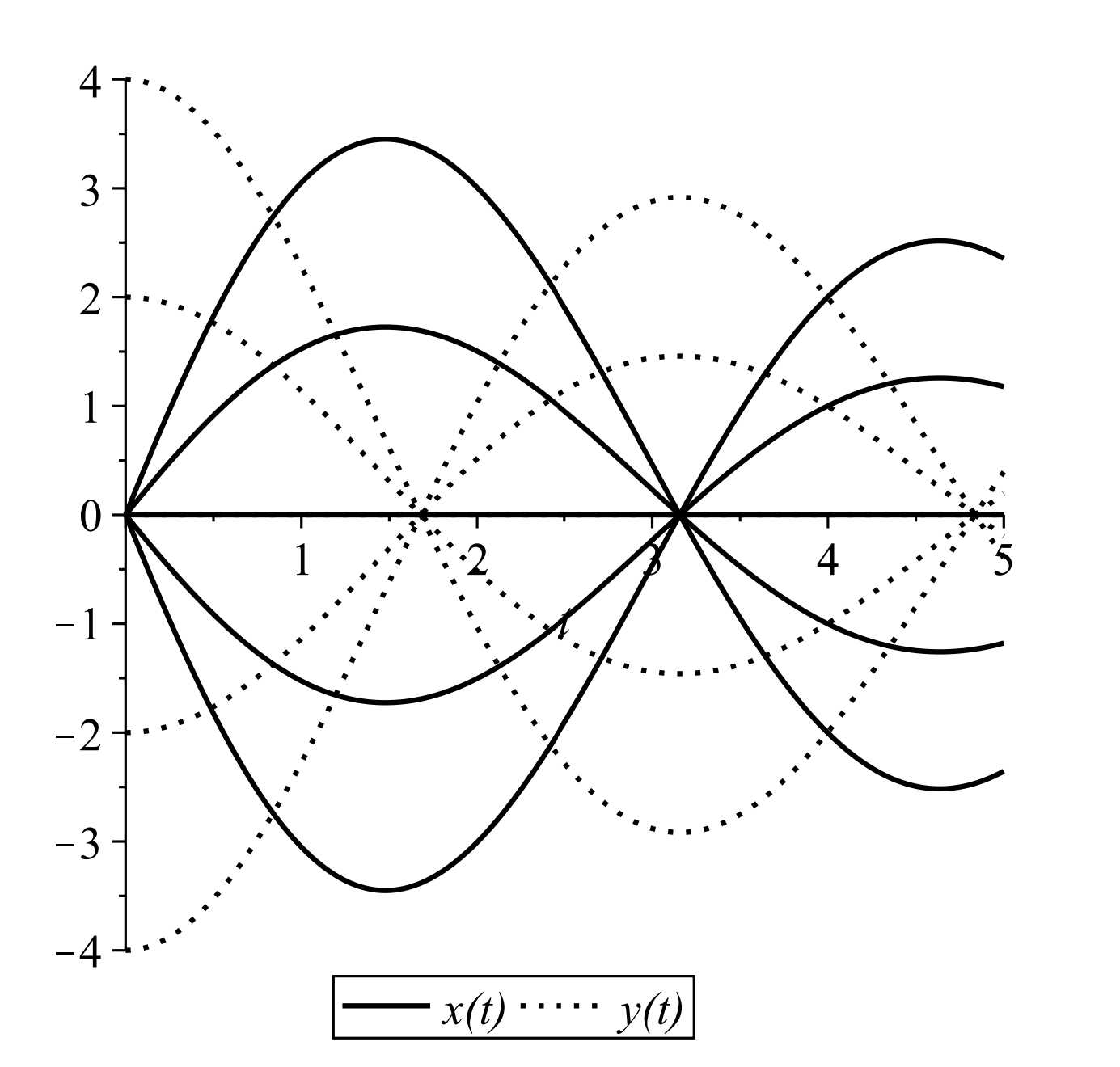
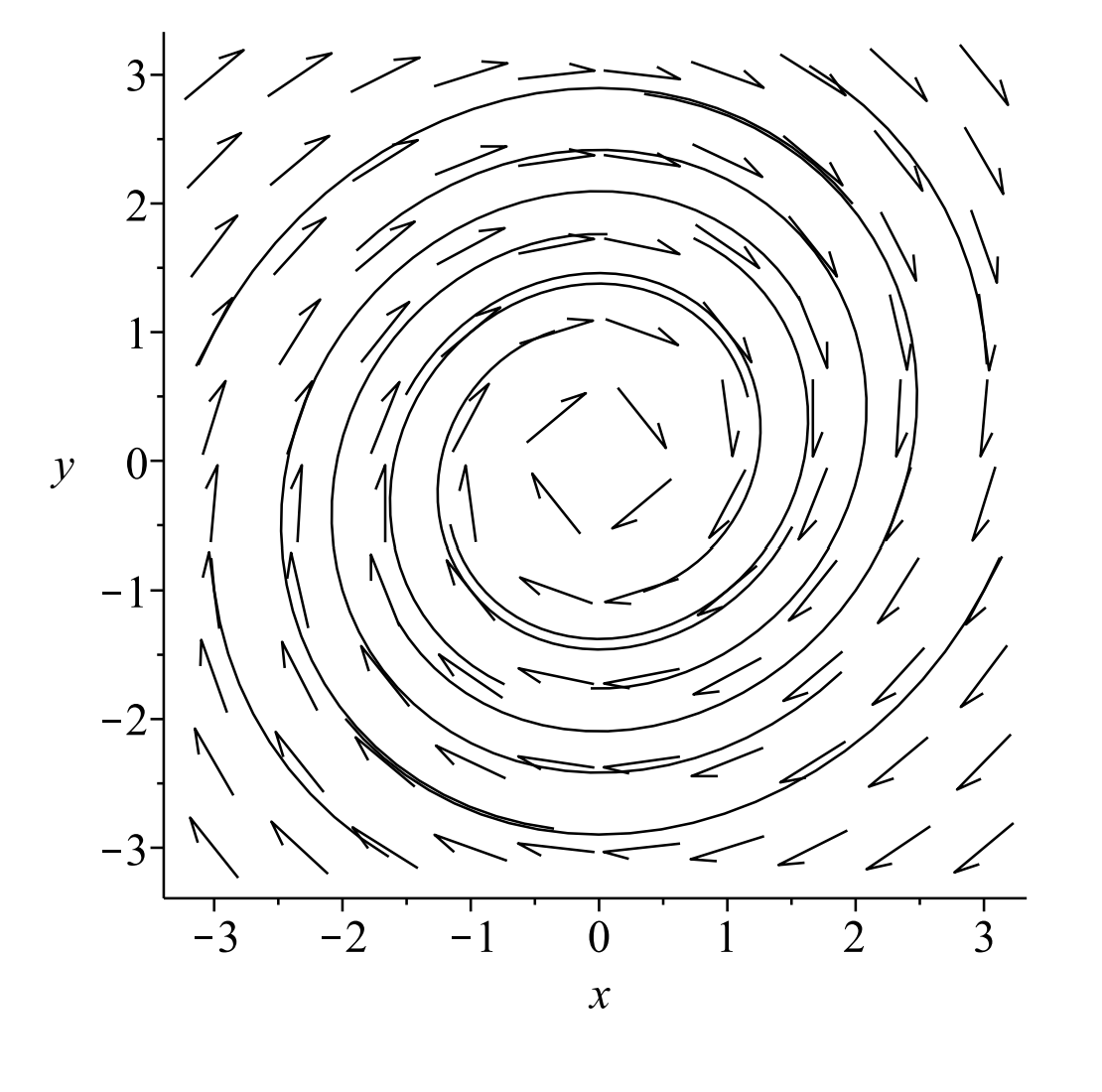
\[ \begin{aligned} &x^{\prime}=y \\ &y^{\prime}=-x \end{aligned} \label{6.25} \]
Este sistema es un sistema simple, acoplado. Ninguna ecuación puede resolverse sin alguna información sobre la otra función desconocida. Sin embargo, podemos diferenciar la primera ecuación y usar la segunda ecuación para obtener
\[x^{\prime \prime}+x=0\nonumber \]
Reconocemos esta ecuación como aquella que aparece en el estudio del movimiento armónico simple. Las soluciones son oscilaciones sinusoidales puras:
\[x(t)=c_{1} \cos t+c_{2} \sin t, \quad y(t)=-c_{1} \sin t+c_{2} \cos t \nonumber \]
En el plano de fase, las trayectorias se pueden determinar mirando el campo de dirección o resolviendo la ecuación de primer orden
\[\dfrac{dy}{dx}=-\dfrac{x}{y} \nonumber \]
Realizando una separación de variables e integrando, encontramos que
\[x^{2}+y^{2}=C\nonumber \]
Así, tenemos una familia de círculos para\(C>0\). (¿Puedes probarlo usando la solución general?) Observar los resultados gráficamente en Cifras\(\PageIndex{12} -\PageIndex{13}\) confirma este resultado. Este tipo de punto se llama centro.
\[ \begin{aligned} x' &=\alpha x+y \\ y' &=-x \end{aligned} \label{6.26} \]
En este ejemplo, veremos un conjunto adicional de comportamientos de puntos de equilibrio en sistemas planos. Hemos agregado un término,\(\alpha x\), al sistema en Ejemplo\(\PageIndex{7}\). Consideraremos los efectos para dos valores específicos del parámetro:\(\alpha=0.1,-0.2\). Los comportamientos resultantes se muestran en las Figuras 6.15-6.18. Vemos órbitas que parecen espirales. Estas órbitas son espirales estables e inestables (o focos, el plural de foco).
Podemos entender estos comportamientos relacionando una vez más el sistema de ecuaciones diferenciales de primer orden con una ecuación diferencial de segundo orden. Usando el método habitual para obtener una ecuación de segundo orden de un sistema, encontramos que\(x(t)\) satisface la ecuación diferencial
\[x''-\alpha x' + x =0 \nonumber \]
Recordamos de nuestro primer curso que esta es una forma de movimiento armónico simple amortiguado. La ecuación característica es\(r^{2}-\alpha r+1=0 .\) La solución de esta ecuación cuadrática es
\[r=\dfrac{\alpha \pm \sqrt{\alpha^{2}-4}}{2} \nonumber \]
Hay cinco casos especiales a considerar como se muestra en la siguiente clasificación.
Clasificación de Soluciones de\(x^{\prime \prime}-\alpha x^{\prime}+x=0\)
- \(\alpha=-2\). Hay una solución real. A este caso se le llama amortiguación crítica ya que la solución\(r=-1\) conduce a un decaimiento exponencial. La solución es\(x(t)=\left(c_{1}+c_{2} t\right) e^{-t} .\)
- \(\alpha<-2\). Hay dos soluciones reales, negativas,\(r=-\mu,-v, \mu, v>0\). La solución es\(x(t)=c_{1} e^{-\mu t}+c_{2} e^{-v t}\). En este caso tenemos lo que se llama movimiento sobreamortiguado. No hay oscilaciones
- \(-2<\alpha<0 .\)Hay dos soluciones conjugadas complejas\(r=\alpha / 2 \pm i \beta\) con parte real menor a cero y\(\beta=\dfrac{\sqrt{4-\alpha^{2}}}{2}\). La solución es\(x(t)=\)\(\left(c_{1} \cos \beta t+c_{2} \sin \beta t\right) e^{\alpha t / 2} .\) Since\(\alpha<0\), esto consiste en unas oscilaciones de tiempos exponenciales en descomposición. Esto a menudo se llama una oscilación subamortiguada.
- \(\alpha=0\). Esto conduce a un simple movimiento armónico.
- \(0<\alpha<2\). Esto es similar al caso subamortiguado, excepto\(\alpha>0\). Las soluciones son oscilaciones crecientes.
- \(\alpha=2 .\)Hay una solución real. La solución es\(x(t)=\left(c_{1}+c_{2} t\right) e^{t} .\) Conduce a un crecimiento ilimitado en el tiempo.
- Para\(\alpha>2\). Hay dos soluciones reales y positivas\(r=\mu, v>0\). La solución es\(x(t)=c_{1} e^{\mu t}+c_{2} e^{v t}\), que crece en el tiempo.
Para\(\alpha<0\) las soluciones están perdiendo energía, por lo que las soluciones pueden oscilar con una amplitud decreciente. (Ver Figura 6.14.) Porque\(\alpha>0\), hay un crecimiento en la amplitud, lo cual no es típico. (Ver Figura 6.15.) Por supuesto, puede haber un movimiento sobreamortiguado si la magnitud de\(\alpha\) es demasiado grande.
Para este ejemplo, escribiremos las soluciones. Se trata de un sistema acoplado para el cual sólo se acopla la segunda ecuación.
\[ \begin{aligned} &x^{\prime}=-x \\ &y^{\prime}=-2 x-y \end{aligned} \label{6.27} \]
Hay dos enfoques posibles:
a. Podríamos resolver la primera ecuación a esta solución en la segunda ecuación, nosotros
\[y^{\prime}+y=-2 c_{1} e^{-t} \nonumber \]
Esta es una ecuación lineal de primer orden relativamente simple para\(y=y(t) .\) El factor de integración es\(\mu=e^{t}\). La solución se encuentra como\(y(t)=\left(c_{2}-\right.\)\(\left.2 c_{1} t\right) e^{-t}\).
b. Otro método sería proceder a reescribir esto como una ecuación de segundo orden. \(x^{\prime \prime}\)La computación no nos lleva muy lejos. Entonces, miramos
\[y^{\prime \prime}=-2 x^{\prime}-y^{\prime}\nonumber \]
\[ \begin{aligned} &=2 x-y^{\prime} \\&=-2 y^{\prime}-y\end{aligned} \label{6.28} \]
Por lo tanto,\(y\) satisface
\[y^{\prime \prime} + 2y^{\prime} +y =0 \nonumber \]
La ecuación característica tiene una raíz real,\(r=-1\). Entonces, escribimos
\[y(t)=\left(k_{1}+k_{2} t\right) e^{-t}\nonumber \]
Este es un nodo degenerado estable. Combinando esto con la solución\(x(t)=c_{1} e^{-t}\), podemos demostrarlo\(y(t)=\left(c_{2}-2 c_{1} t\right) e^{-t}\) como antes.
En la Figura\(\PageIndex{16}\) vemos varias órbitas en este sistema. Se diferencia del nodo estable que se muestra en la Figura\(\PageIndex{4}\) en que solo hay una dirección a lo largo de la cual las órbitas se acercan al origen en lugar de dos. Si uno recoge\(c_{1}=0\), entonces\(x(t)=0\) y\(y(t)=c_{2} e^{-t} .\) Esto conduce a órbitas que corren a lo largo del\(y\) eje -como se ve en la figura.
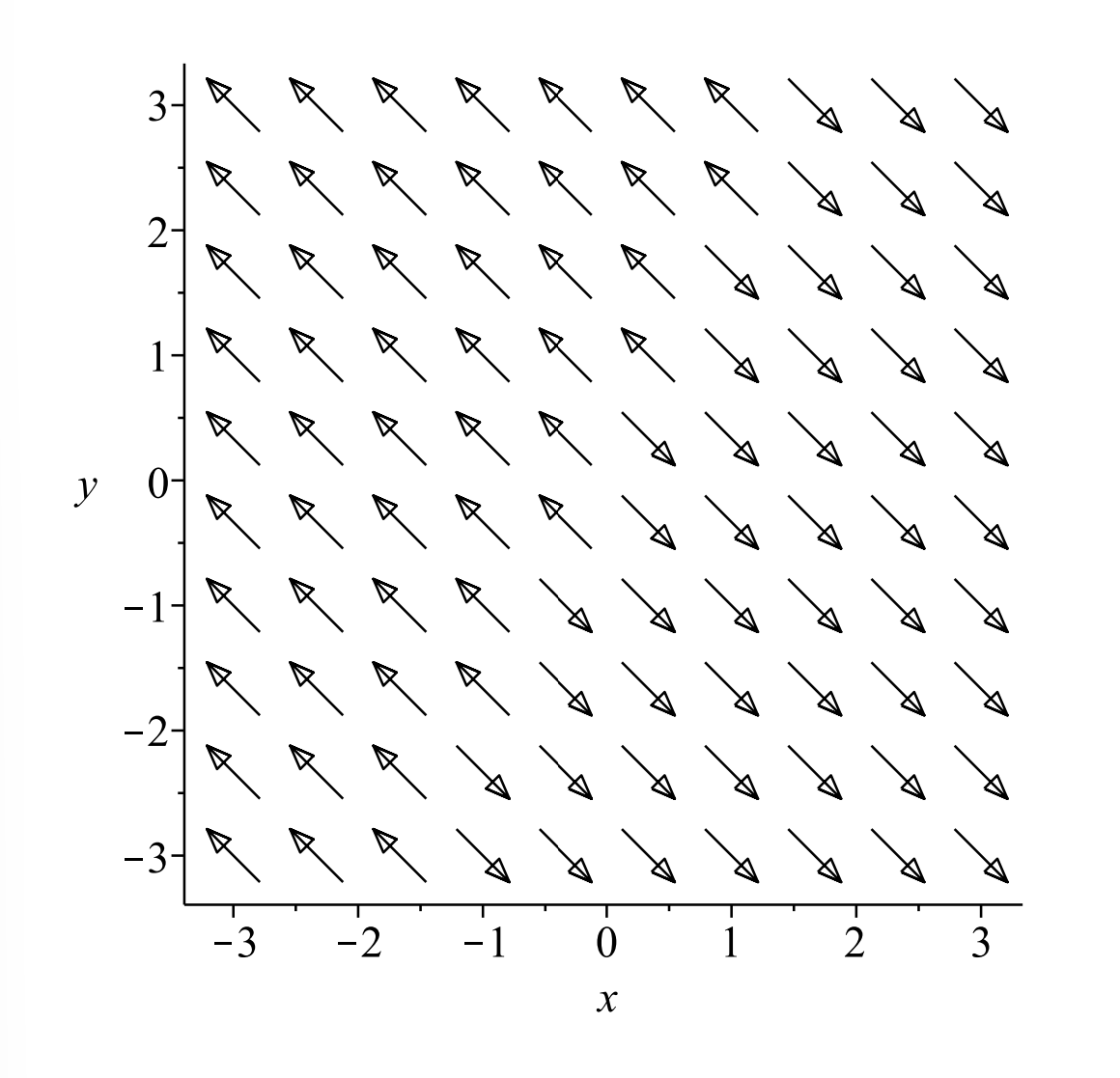
\[ \begin{aligned} &x^{\prime}=2 x-y \\ &y^{\prime}=-2 x+y \end{aligned} \label{6.29} \]
En este último ejemplo, tenemos un conjunto acoplado de ecuaciones. Lo reescribimos como una ecuación diferencial de segundo orden:
\[ \begin{aligned} x^{\prime \prime} &=2 x^{\prime}-y^{\prime} \\ &=2 x^{\prime}-(-2 x+y) \\ &=2 x^{\prime}+2 x+\left(x^{\prime}-2 x\right)=3 x^{\prime} \end{aligned} \label{6.30} \]
Entonces, la ecuación de segundo orden es
\[x^{\prime \prime}-3 x^{\prime}=0 \nonumber \]
y la ecuación característica es\(0=r(r-3)\). Esto da la solución general como
\[x(t)=c_{1}+c_{2} e^{3 t}\nonumber \]
y por lo tanto
\[y=2 x-x^{\prime}=2\left(c_{1}+c_{2} e^{3} t\right)-\left(3 c_{2} e^{3 t}\right)=2 c_{1}-c_{2} e^{3 t}\nonumber \]
En la Figura 6.19 se muestra el campo de dirección. El campo de pendiente constante que se ve en este ejemplo se confirma mediante un simple cálculo:
\[\dfrac{d y}{d x}=\dfrac{-2 x+y}{2 x-y}=-1 .\nonumber \]
Además, mirando las condiciones iniciales con\(y=2 x\), tenemos en\(t=0\),
\[2 c_{1}-c_{2}=2\left(c_{1}+c_{2}\right) \quad \Rightarrow \quad c_{2}=0\nonumber \]
Por lo tanto, los puntos en esta línea permanecen en esta línea para siempre,\((x, y)=\)\(\left(c_{1}, 2 c_{1}\right) .\) Esta línea de puntos fijos se llama una línea de equilibrios.
6.1.4: Representación Polar de Espirales
EN LOS EJEMPLOS CON UN CENTRO O UNA ESPIRAL, uno podría ser capaz de escribir las soluciones en coordenadas polares. Recordemos que un punto en el plano puede ser descrito por\((r, \theta)\) coordenadas cartesianas\((x, y)\) o polares. Dada la forma polar, se pueden encontrar los componentes cartesianos usando
\[x=r \cos \theta \text { and } y=r \sin \theta \nonumber \]
Dadas las coordenadas cartesianas, se pueden encontrar las coordenadas polares usando
\[r^{2}=x^{2}+y^{2} \text { and } \tan \theta=\dfrac{y}{x} \nonumber \]
Ya que\(x\) y\(y\) son funciones de\(t\), entonces naturalmente podemos pensar en\(r\) y\(\theta\) como funciones de\(t\). Convertir un sistema de ecuaciones en el plano\(y^{\prime}\) para\(x^{\prime}\) y en forma polar requiere saber\(r^{\prime}\) y\(\theta^{\prime} .\) Entonces, primero encontramos expresiones para\(r^{\prime}\) y\(\theta^{\prime}\) en términos de \(x^{\prime}\)y\(y^{\prime}\).
Diferenciar la primera ecuación en la ecuación\(\PageIndex{31}\) da
\[r r^{\prime}=x x^{\prime}+y y^{\prime}.\nonumber \]
Insertando las expresiones para\(x^{\prime}\) y\(y^{\prime}\) desde el sistema\(\PageIndex{9}\), tenemos
\[r r^{\prime}=x(a x+b y)+y(c x+d y)\nonumber \]
En algunos casos esto puede escribirse íntegramente en términos de\(r^{\prime}\) s. Del mismo modo, tenemos que
\[\theta^{\prime}=\dfrac{x y^{\prime}-y x^{\prime}}{r^{2}}\nonumber \]
que el lector puede probar para la tarea.
En resumen, al convertir ecuaciones de primer orden de forma rectangular a polar, se necesitan las siguientes relaciones.
Derivadas de variables polares
\[ \begin{aligned}r^{\prime} &=\dfrac{x x^{\prime}+y y^{\prime}}{r} \\\theta^{\prime} &=\dfrac{x y^{\prime}-y x^{\prime}}{r^{2}} \end{aligned} \label{6.32} \]
Reescribir el siguiente sistema en el sistema resultante.
\[ \begin{aligned}x^{\prime} &=a x+b y \\y^{\prime} &=-b x+a y .\end{aligned}\label{6.33} \]
Primero calculamos\(r^{\prime}\) y\(\theta^{\prime}\):
\[r r^{\prime}=x x^{\prime}+y y^{\prime}=x(a x+b y)+y(-b x+a y)=a r^{2} \nonumber \]
\[r^{2} \theta^{\prime}=x y^{\prime}-y x^{\prime}=x(-b x+a y)-y(a x+b y)=-b r^{2} .\nonumber \]
Esto lleva a un sistema más simple
\[ \begin{aligned} r^{\prime} &=a r \\ \theta^{\prime} &=-b \end{aligned} \label{6.34} \]
Este sistema está desacoplado. La segunda ecuación en este sistema indica que atravesamos la órbita a una velocidad constante en el sentido de las agujas del reloj. Resolviendo estas ecuaciones, tenemos eso\(r(t)=r_{0} e^{a t}, \quad \theta(t)=\)\(\theta_{0}-b t\). Eliminando\(t\) entre estas soluciones, finalmente encontramos la ecuación polar de las órbitas:
\[r=r_{0} e^{-a\left(\theta-\theta_{0}\right) t / b} \nonumber \]
Si graficas esto para\(a \neq 0\), obtendrás espirales estables o inestables.
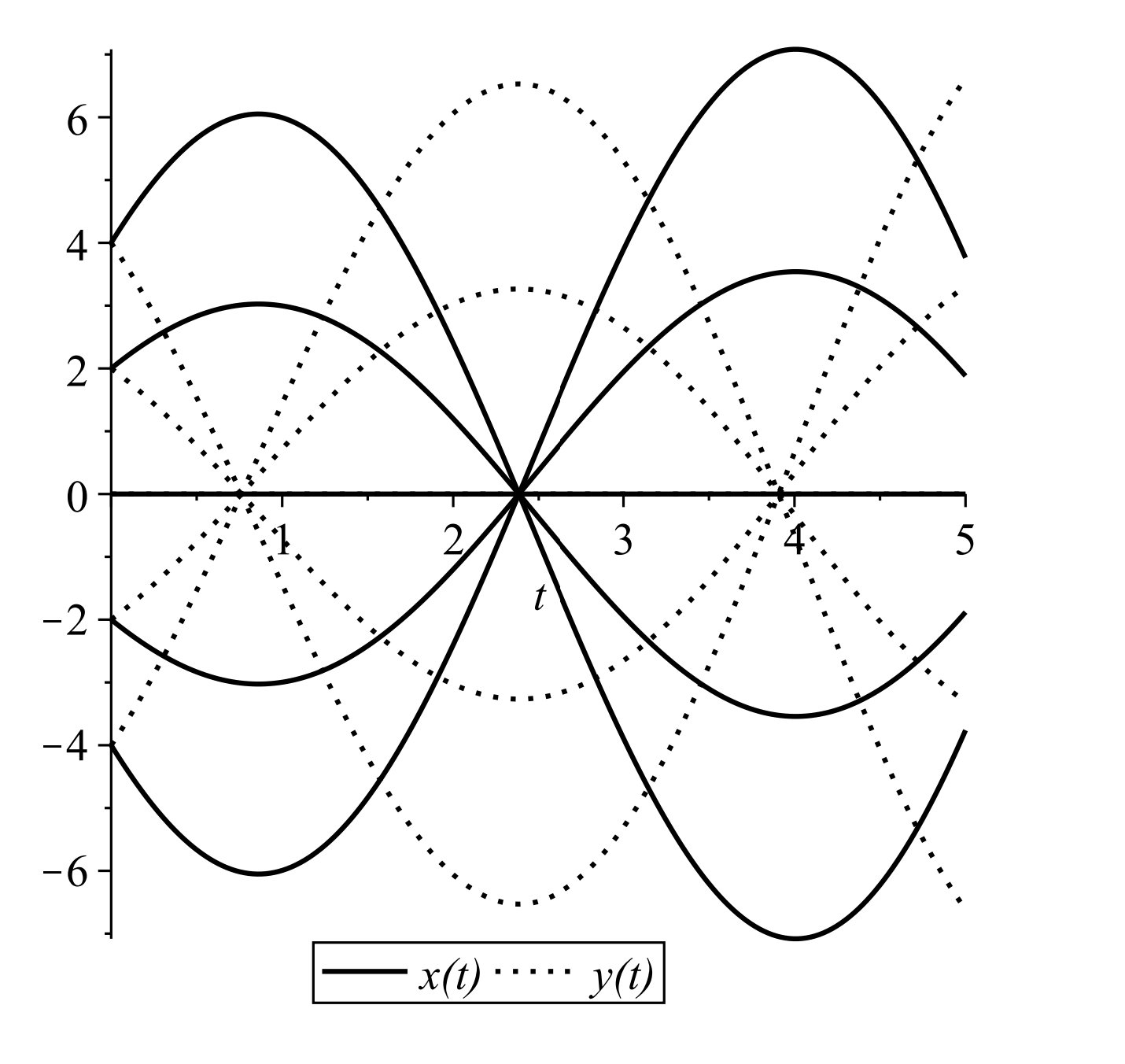
Considerar el sistema específico
\[ \begin{aligned} &x^{\prime}=-y+x \\ &y^{\prime}=x+y \end{aligned} \label{6.35} \]
Para convertir este sistema en forma polar, calculamos
\[\begin{gathered} r r^{\prime}=x x^{\prime}+y y^{\prime}=x(-y+x)+y(x+y)=r^{2} \\ r^{2} \theta^{\prime}=-x y^{\prime}-y x^{\prime}=x(x+y)-y(-y+x)=r^{2} \end{gathered} \nonumber \]
Esto lleva a un sistema más simple
\[ \begin{aligned} &r^{\prime}=r \\ &\theta^{\prime}=1 . \end{aligned} \label{6.36} \]
Resolver estas ecuaciones rinde
\[r(t)=r_{0} e^{t}, \quad \theta(t)=t+\theta_{0} \nonumber \]
La eliminación\(t\) de esta solución da las órbitas en el plano de fase,\(r(\theta)=r_{0} e^{\theta-\theta_{0}} .\)
Un ejemplo más complicado surge para un sistema no lineal de ecuaciones diferenciales. Considera el siguiente ejemplo.
\[ \begin{aligned} &x^{\prime}=-y+x\left(1-x^{2}-y^{2}\right) \\ &y^{\prime}=x+y\left(1-x^{2}-y^{2}\right) \end{aligned} \label{6.37} \]
Transformándose a coordenadas polares, se puede demostrar que para convertir este sistema en forma polar, calculamos
\[r^{\prime}=r\left(1-r^{2}\right), \quad \theta^{\prime}=1 \nonumber \]
Este sistema desacoplado se puede resolver y esto se deja en manos del lector.