
8.6: Ecuaciones paramétricas
- Page ID
- 116907

Muchas formas, incluso aquellas tan simples como los círculos, no se pueden representar como una ecuación donde\(y\) es una función de\(x\). Consideremos, por ejemplo, el camino que sigue una luna mientras orbita alrededor de un planeta, que simultáneamente gira alrededor de un sol. En algunos casos, las ecuaciones polares proporcionan una manera de representar tal camino. En otros, necesitamos un enfoque más versátil que nos permita representar tanto las\(x\)\(y\) coordenadas como en términos de una tercera variable, o parámetro.
Definición: Ecuaciones paramétricas
Un sistema de ecuaciones paramétricas es un par de funciones\(x(t)\) y\(y(t)\) en el que las\(y\) coordenadas\(x\) y son la salida, representada en términos de un tercer parámetro de entrada,\(t\).
Ejemplo\(\PageIndex{1}\)
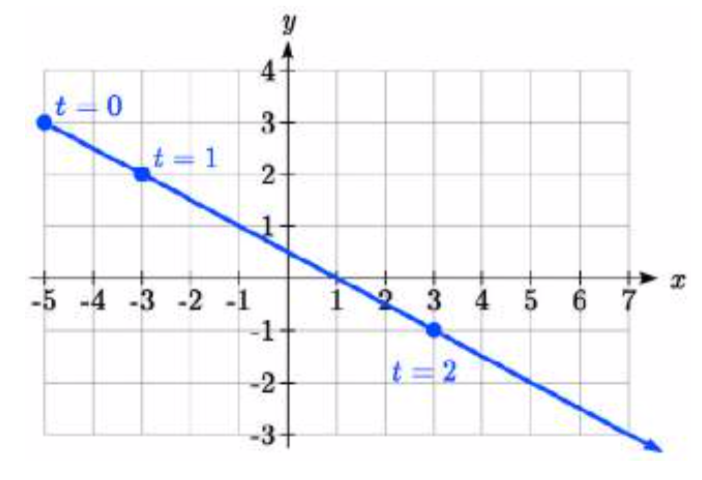
Moviéndose a una velocidad constante, un objeto se mueve a una velocidad constante a lo largo de una trayectoria recta desde las coordenadas (-5, 3) hasta las coordenadas (3, -1) en 4 segundos, donde las coordenadas se miden en metros. Encuentra ecuaciones paramétricas para la posición del objeto.
Solución
La\(x\) coordenada del objeto inicia en -5 metros, y va a +3 metros, esto significa que la\(x\) dirección ha cambiado en 8 metros en 4 segundos, dándonos una tasa de 2 metros por segundo. Ahora podemos escribir la\(x\) coordenada como una función lineal con respecto al tiempo,\(t\),\(x(t) = −5 + 2t\). De igual manera, el\(y\) valor inicia en 3 y va a -1, dando un cambio de\(y\) valor de 4 metros, es decir, los\(y\) valores han disminuido en 4 metros en 4 segundos, para una tasa de -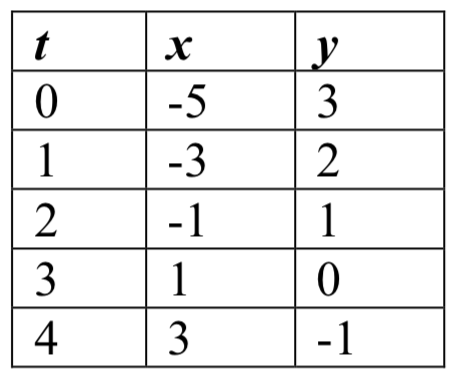 1 metro por nd, dando ecuación\(y(t)=3−t\). Juntas, estas son las ecuaciones paramétricas para la posición del objeto:
1 metro por nd, dando ecuación\(y(t)=3−t\). Juntas, estas son las ecuaciones paramétricas para la posición del objeto:
\[x(t) = -5 + 2t\nonumber\]
\[y(t) = 3 - t\nonumber\]
Usando estas ecuaciones, podemos construir una tabla de\(t\),\(x\), y\(y\) valores. Por el contexto, nos limitamos a\(t\) valores no negativos para este ejemplo, pero en general puedes usar cualquier valor.
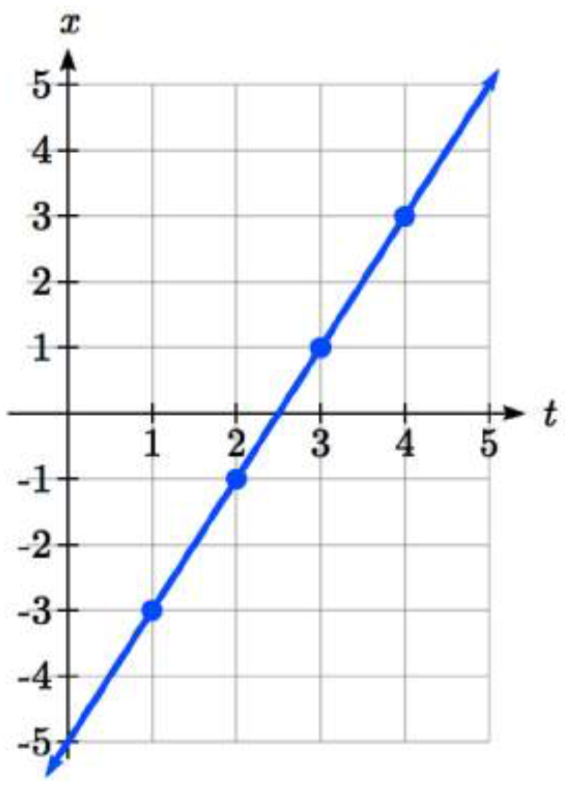
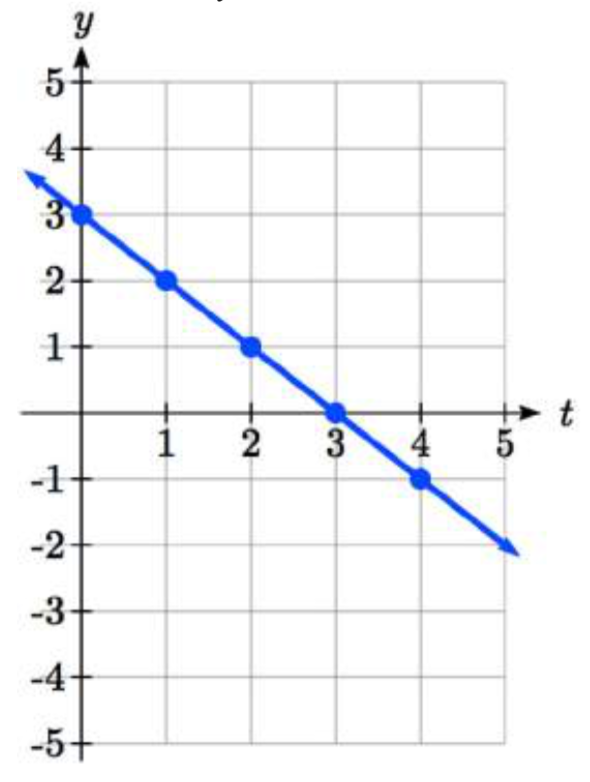
A partir de esta tabla, podríamos crear tres posibles gráficas: una gráfica de\(x\) vs.\(t\), que mostraría la posición horizontal a lo largo del tiempo, una gráfica de\(y\) vs.\(t\), que mostraría la posición vertical a lo largo del tiempo, o una gráfica de\(y\) vs.\(x\), mostrando la posición del objeto en el plano.
Posición de\(x\) como una función del tiempo Posición de\(y\) como una función del tiempo Posición de\(y\) relativo a\(x\)
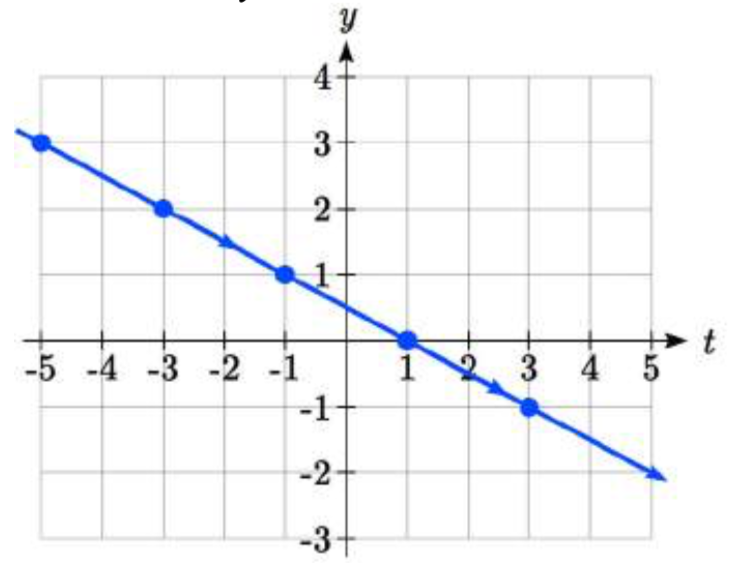
Observe que el parámetro\(t\) no aparece explícitamente en esta tercera gráfica. En ocasiones, cuando el parámetro\(t\) sí representa una cantidad como el tiempo, podríamos indicar la dirección del movimiento en la gráfica usando una flecha, como se muestra arriba.
A menudo no hay una representación paramétrica única para una curva. En el Ejemplo 1 asumimos que el objeto se movía a un ritmo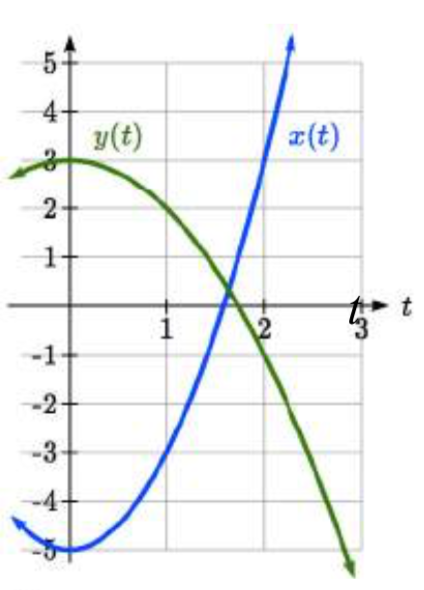 constante a lo largo de una línea recta. Si mantuvimos la suposición sobre el camino (línea recta) pero no asumimos que la velocidad era constante, podríamos obtener un sistema como:
constante a lo largo de una línea recta. Si mantuvimos la suposición sobre el camino (línea recta) pero no asumimos que la velocidad era constante, podríamos obtener un sistema como:
\[x(t) = -5 + 2t^2\nonumber\]
\[y(t) = 3 - t^2\nonumber\]
Esto comienza en (-5, 3) cuando\(t = 0\) y termina en (3, -1) cuando\(t = 2\). Si graficamos la\(y(t)\) función\(x(t)\) y por separado, podemos ver que esas ya no son lineales, pero si\(y\) graficamos\(x\) vs veremos que seguimos obteniendo una ruta en línea recta.
Ejemplo\(\PageIndex{2}\)
Esbozar un gráfico de
\[x(t) = t^2 + 1\nonumber\]
\[y(t) = 2 + t\nonumber\]
Solución
Podemos comenzar por crear una tabla de valores. A partir de esta tabla, podemos trazar los puntos (\(x\),\(y\)) en el plano, bosquejar en un gr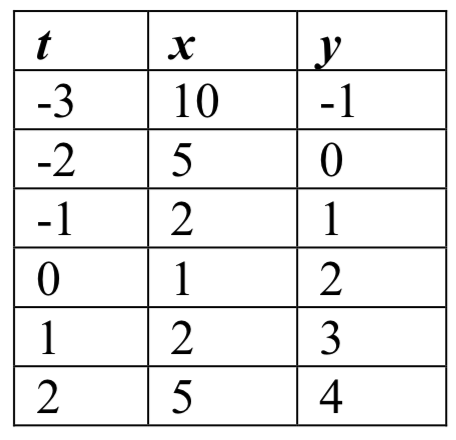 aph áspero de la curva, e indicar la dirección del movimiento con respecto al tiempo mediante flechas.
aph áspero de la curva, e indicar la dirección del movimiento con respecto al tiempo mediante flechas.
Observe que aquí las ecuaciones paramétricas describen una forma para la cual no\(y\) es función de\(x\). Este es un ejemplo de por qué el uso de ecuaciones paramétricas puede ser útil, ya que pueden representar dicha gráfica como un conjunto de funciones. Esta gráfica en particular también parece ser una parábola donde\(x\) es función de\(y\), que pronto verificaremos.
Ejemplo\(\PageIndex{3}\)
Esbozar un gráfico de
\[x(t) = 3\cos(t)\nonumber\]
\[y(t) = 3\sin(t)\nonumber\]
Solución
Estas ecuaciones deberían parecer familiares. Cuando aprendimos por primera vez sobre seno y coseno encontramos que las coordenadas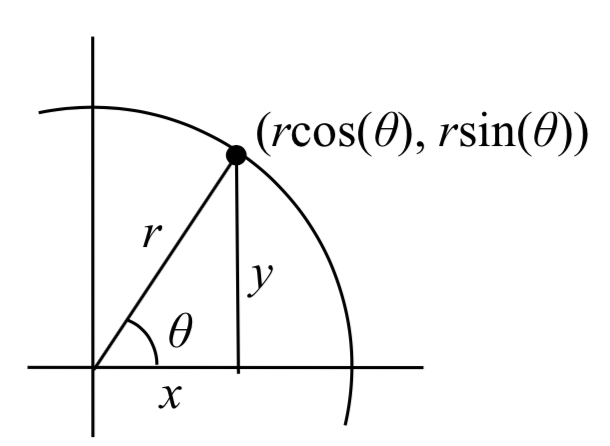 de un punto en un círculo de radio\(r\) en un ángulo de\(\theta\) serán\(x = r \cos(\theta), y r \sin(\theta)\). Las ecuaciones anteriores están en la misma forma, con\(r =3\), y\(t\) se utilizan en lugar de\(\theta\).
de un punto en un círculo de radio\(r\) en un ángulo de\(\theta\) serán\(x = r \cos(\theta), y r \sin(\theta)\). Las ecuaciones anteriores están en la misma forma, con\(r =3\), y\(t\) se utilizan en lugar de\(\theta\).
Esto sugiere que para cada valor de\(t\), estas ecuaciones paramétricas dan un punto en un círculo de ra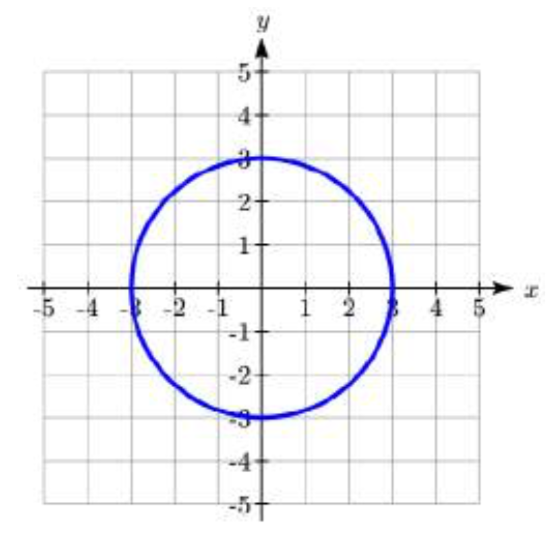 dius 3 en el ángulo correspondiente a\(t\). En\(t = 0\), la gráfica estaría en\(x = 3\cos(0), y = 3\sin(0)\), el punto (3,0). En efecto, estas ecuaciones describen la ecuación de un círculo, dibujado en sentido antihorario.
dius 3 en el ángulo correspondiente a\(t\). En\(t = 0\), la gráfica estaría en\(x = 3\cos(0), y = 3\sin(0)\), el punto (3,0). En efecto, estas ecuaciones describen la ecuación de un círculo, dibujado en sentido antihorario.
Curiosamente, estas ecuaciones paramétricas similares también describen el círculo de radio 3:
\[x(t) = 3\sin(t)\nonumber\]
\[y(t) = 3\cos(t)\nonumber\]
La diferencia con estas ecuaciones es que la gráfica comenzaría en\(x = 3\sin(0)\),\(y = 3\cos(0)\), el punto (0, 3). A medida que\(t\) aumenta a partir de 0, el\(x\) valor aumentará, lo que indica que esta ecuación dibujaría la gráfica en sentido horario.
Si bien crear una\(t-x-y\) tabla, trazar puntos y conectar los puntos con una curva suave generalmente funciona para darnos una idea aproximada de cómo es la gráfica de un sistema de ecuaciones paramétricas, generalmente es más fácil usar la tecnología para crear estas tablas y (simultáneamente) gráficas mucho más bonitas.
Ejemplo\(\PageIndex{4}\)
Esbozar un gráfico de\(\begin{array} {rcl} {x(t)} &= & {2\cos(t)} \\ {y(t)} &= & {3\sin(t)} \end{array}\)
Solución
Observe primero que esta ecuación se ve muy similar a las del ejemplo anterior, excepto que los coeficientes no son equ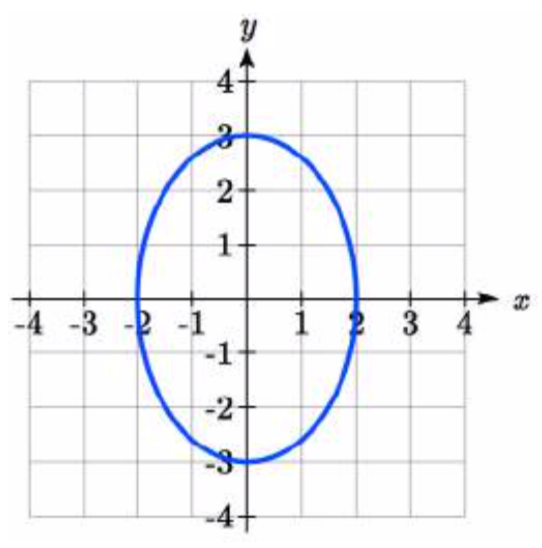 al. Podrías adivinar que el emparejamiento de cos y pecado seguirá produciendo rotación, pero ahora\(x\) variará de -2 a 2 mientras que\(y\) variará de -3 a 3, creando una elipse.
al. Podrías adivinar que el emparejamiento de cos y pecado seguirá produciendo rotación, pero ahora\(x\) variará de -2 a 2 mientras que\(y\) variará de -3 a 3, creando una elipse.
Utilizando la tecnología podemos generar una gráfica de esta ecuación, verificando que efectivamente es una elipse.
Similar a graficar ecuaciones polares, debes cambiar el MODO en tu calculadora (o seleccionar ecuaciones paramétricas en tu tecnología gráfica) antes de graficar un sistema de ecuaciones paramétricas. Sabrás que has ingresado exitosamente al modo paramétrico cuando la entrada de la ecuación haya cambiado para pedir a\(x(t)=\) y\(y(t)=\) par de ecuaciones.
Ejercicio\(\PageIndex{1}\)
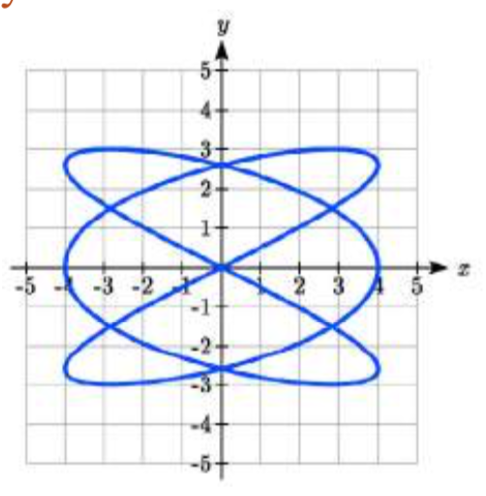
Esbozar una gráfica de\(\begin{array} {rcl} {x(t)} &= & {4\cos(3t)} \\ {y(t)} &= & {3\sin(2t)} \end{array}\). Este es un ejemplo de una figura de Lissajous.
- Contestar
-
Ejemplo\(\PageIndex{5}\)
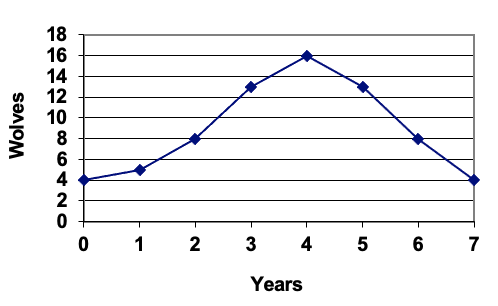
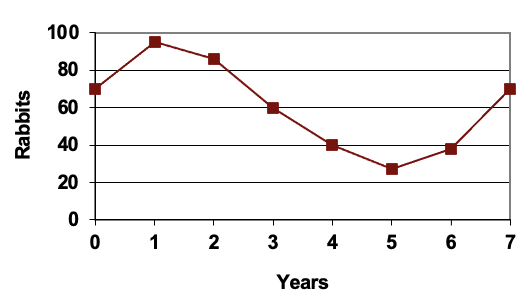
Las poblaciones de conejos y lobos en una isla a lo largo del tiempo están dadas por los gráficos a continuación. Utilice estas gráficas para bosquejar una gráfica en el plano r-w que muestre la relación entre el número de conejos y el número de lobos.
Solución
Para cada entrada\(t\), podemos determinar el número de conejos,\(r\), y el número de lobos,\(w\), a partir de las respectivas gráficas, para luego trazar el punto correspondiente en el\(r-w\) plano.
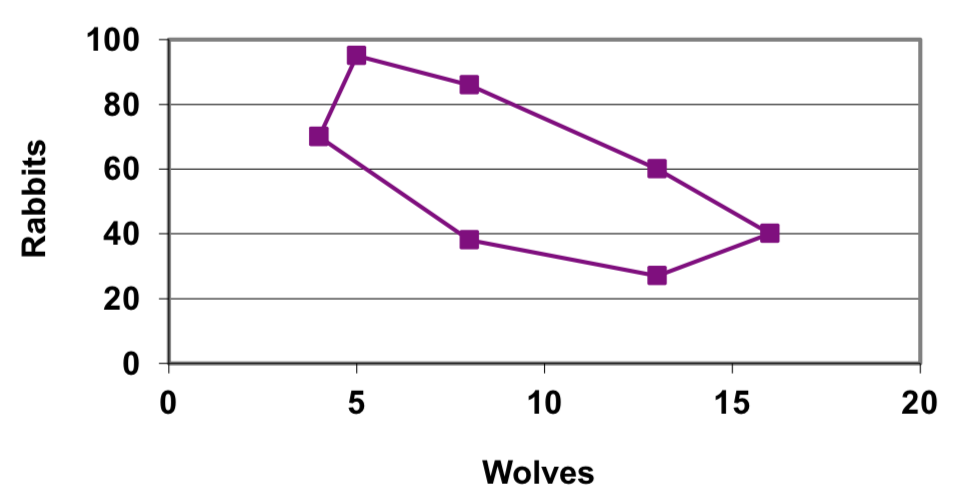
Esta gráfica ayuda a revelar la interacción cíclica entre las dos poblaciones.
Conversión de paramétrico a cartesiano
En algunos casos, es posible eliminar el parámetro\(t\), lo que permite escribir un par de ecuaciones paramétricas como una ecuación cartesiana.
Es más fácil hacer esto si una de las\(y(t)\) funciones\(x(t)\) o se puede resolver fácilmente\(t\), lo que le permite luego sustituir la expresión restante en la segunda parte.
Ejemplo\(\PageIndex{6}\)
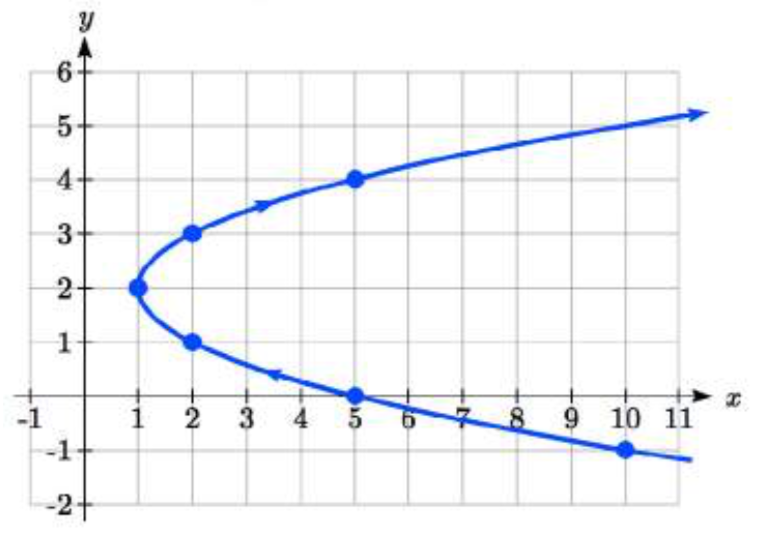
Escribir\(\begin{array} {rcl} {x(t)} &= & {t^2 + 1} \\ {y(t)} &= & {2 + t} \end{array}\) como una ecuación cartesiana, si es posible.
Solución
Aquí, la ecuación para\(y\) es lineal, por lo que es relativamente fácil de resolver\(t\). Dado que la ecuación cartesiana resultante probablemente no será una función, y por conveniencia, dejamos caer la notación de función.
\[y = 2 + t\nonumber\]Resolver por\(t\)
\[y - 2 = t\nonumber\] Sustituir esto por\(t\) en la\(x\) ecuación
\[x = (y - 2)^2 + 1\nonumber\]
Observe que esta es la ecuación de una parábola con\(x\) en función de\(y\), con vértice en (1,2), abriéndose a la derecha. Comparando esto con la gráfica del Ejemplo 2, vemos (como era de esperar) que produce la misma gráfica en el\(x-y\) plano que las ecuaciones paramétricas originales.
Ejercicio\(\PageIndex{2}\)
Escribir\(\begin{array} {rcl} {x(t)} &= & {t^3} \\ {y(t)} &= & {t^6} \end{array}\) como una ecuación cartesiana, si es posible.
- Contestar
-
\[y = (t^3)^2\text{, so }y = x^2\nonumber\]
Ejemplo\(\PageIndex{7}\)
Escribir\(\begin{array} {x(t)} &= & {\sqrt{t} + 2} \\ {y(t)} &= & {\text{log}(t)} \end{array}\) como una ecuación cartesiana, si es posible.
Solución
Podríamos resolver ya sea la primera o la segunda ecuación para\(t\). Resolviendo el primero,
\[x = \sqrt{t} + 2\nonumber\]
\[x - 2 = \sqrt{t}\nonumber\]Cuadrar ambos lados
\[(x - 2)^2 = t\nonumber\] Sustituir en la\(y\) ecuación
\[y = \text{log} ((x - 2)^2)\nonumber\]
Dado que la ecuación paramétrica solo se define para\(t > 0\), esta ecuación cartesiana es equivalente a la ecuación paramétrica en el dominio correspondiente. Las ecuaciones paramétricas muestran que cuando\(t > 0\),\(x > 2\) y\(y > 0\), por lo tanto, el dominio de la ecuación cartesiana debe limitarse a\(x > 2\).
Para asegurar que la ecuación cartesiana sea lo más equivalente posible a la ecuación paramétrica original, tratamos de evitar el uso de funciones inversas restringidas de dominio, como las funciones trigonométricas inversas, cuando sea posible. Para ecuaciones que involucran funciones trig, a menudo tratamos de encontrar una identidad para utilizar para evitar las funciones inversas.
Ejemplo\(\PageIndex{8}\)
Escribir\(\begin{array} {rcl} {x(t)} &= & {2\cos(t)} \\ {y(t)} &= & {3\sin(t)} \end{array}\) como una ecuación cartesiana, si es posible.
Solución
Para reescribir esto, podemos utilizar la identidad pitagórica\(\cos^2(t) + \sin^2(t) = 1\).
\[x = 2\cos(t)\text{ so }\dfrac{x}{2} = \cos(t)\nonumber\]
\[y = 3\sin(t)\text{ so }\dfrac{y}{3} = \sin(t)\nonumber\]
Comenzando por la identidad pitagórica,
\[\cos^2(t) + \sin^2(t) = 1\nonumber\]Sustituir en las expresiones de la forma paramétrica
\[(\dfrac{x}{2})^2 + (\dfrac{y}{3})^2 = 1\nonumber\] Simplificar
\[\dfrac{x^2}{4} + \dfrac{y^2}{9} = 1\nonumber\]
Esta es una ecuación cartesiana para la elipse que graficamos anteriormente.
Parametrización de Curvas
Si bien convertir de forma paramétrica a cartesiana puede ser útil, a menudo es más útil parametrizar una ecuación cartesiana, convirtiéndola en forma paramétrica.
Si la ecuación cartesiana da una variable en función de la otra, entonces la parametrización es trivial: la variable independiente en la función puede definirse simplemente como\(t\).
Ejemplo\(\PageIndex{9}\)
Parametrizar la ecuación\(x = y^3 - 2y\).
Solución
En la ecuación,\(x\) se expresa como una función de\(y\). Al definir\(y = t\) podemos entonces sustituir eso en la ecuación cartesiana, cediendo\(x = t^3 - 2t\). En conjunto, esto produce la forma paramétrica:
\[x(t) = t^3 - 2t\nonumber\]
\[y(t) = t\nonumber\]
Ejercicio\(\PageIndex{3}\)
Escribir\(x^2 + y^2 = 3\) en forma paramétrica, si es posible.
- Contestar
-
\[\begin{array} {rcl} {x(t)} &= & {3\cos(t)} \\ {y(t)} &= & 3\sin(t) \end{array}\nonumber\]
Además de parametrizar ecuaciones cartesianas, también podemos parametrizar comportamientos y movimientos.
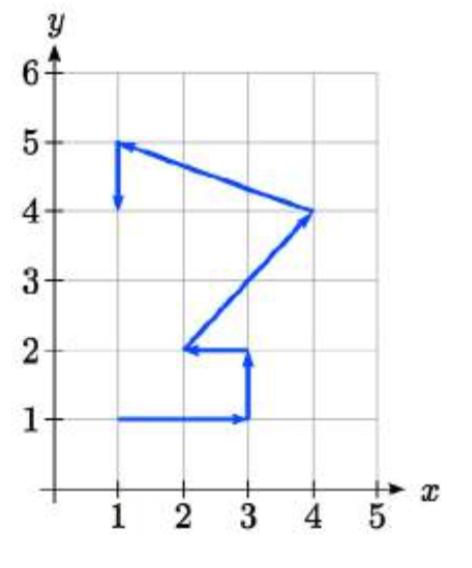
Ejemplo\(\PageIndex{10}\)
Un robot sigue el camino que se muestra. Crear una tabla de valores para las\(y(t)\) funciones\(x(t)\) y, asumiendo que el robot tarda un segundo en realizar cada movimiento.
Solución
Ya que conocemos la dirección del movimiento, podemos introducir valores consecutivos para\(t\) lo largo de la trayectoria del robot. Usando estos valores con las\(y\) coordenadas\(x\) y del robot, podemos crear las tablas. Por ejemplo, designamos el punto de partida, en (1, 1), como la posición en\(t = 0\), el siguiente punto en (3, 1) como la posición en\(t = 1\), y así sucesivamente.

Observe cómo esto también se une a los vectores. El recorrido del robot a medida que se mueve por el plano cartesiano también podría mostrarse como vectores y se podría calcular la distancia total recorrida y el desplazamiento.
Ejemplo\(\PageIndex{11}\)
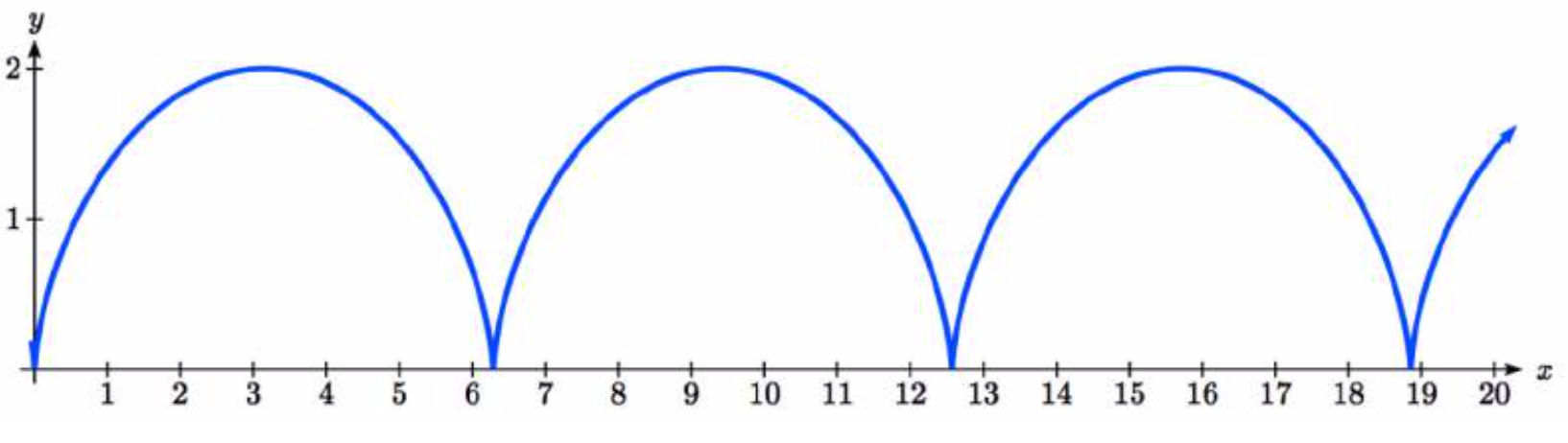
Se coloca una luz en el borde de una llanta de bicicleta como se muestra y la bicicleta comienza a rodar por la calle. Encuentre una ecuación paramétrica para la posición de la luz después de que la rueda haya girado en un ángulo de\(\theta\).

Solución
En relación con el centro de la rueda, la posición de la luz se puede encontrar como las coordenadas de un punto en un círculo, pero como la\(x\) coordenada comienza en 0 y se mueve en dirección negativa, mientras que la\(y\) coordenada comienza en el valor más bajo, las coordenadas del punto estarán dadas por:
\[x = -r\sin(\theta)\nonumber\]
\[y = -r\cos(\theta)\nonumber\]
El centro de la rueda, por su parte, se mueve horizontalmente. Permanece a una altura constante de\(r\), pero la posición horizontal se moverá una distancia equivalente a la longitud del arco del círculo dibujado por el ángulo,\(s = r\theta\). La posición del centro del círculo es entonces
\[x = r\theta\nonumber\]
\[y = r\nonumber\]
Combinando la posición del centro de la rueda con la posición de la luz en la rueda con relación al centro, obtenemos la siguiente ecuación paramétricaw, con\(\theta\) como parámetro:
\[x = r\theta - r\sin(\theta) = r(\theta - \sin(\theta))\nonumber\]
\[y = r - r\cos(\theta) = r(1 - \cos(\theta))\nonumber\]
El gráfico de resultados se llama cicloide.
Ejemplo\(\PageIndex{12}\)
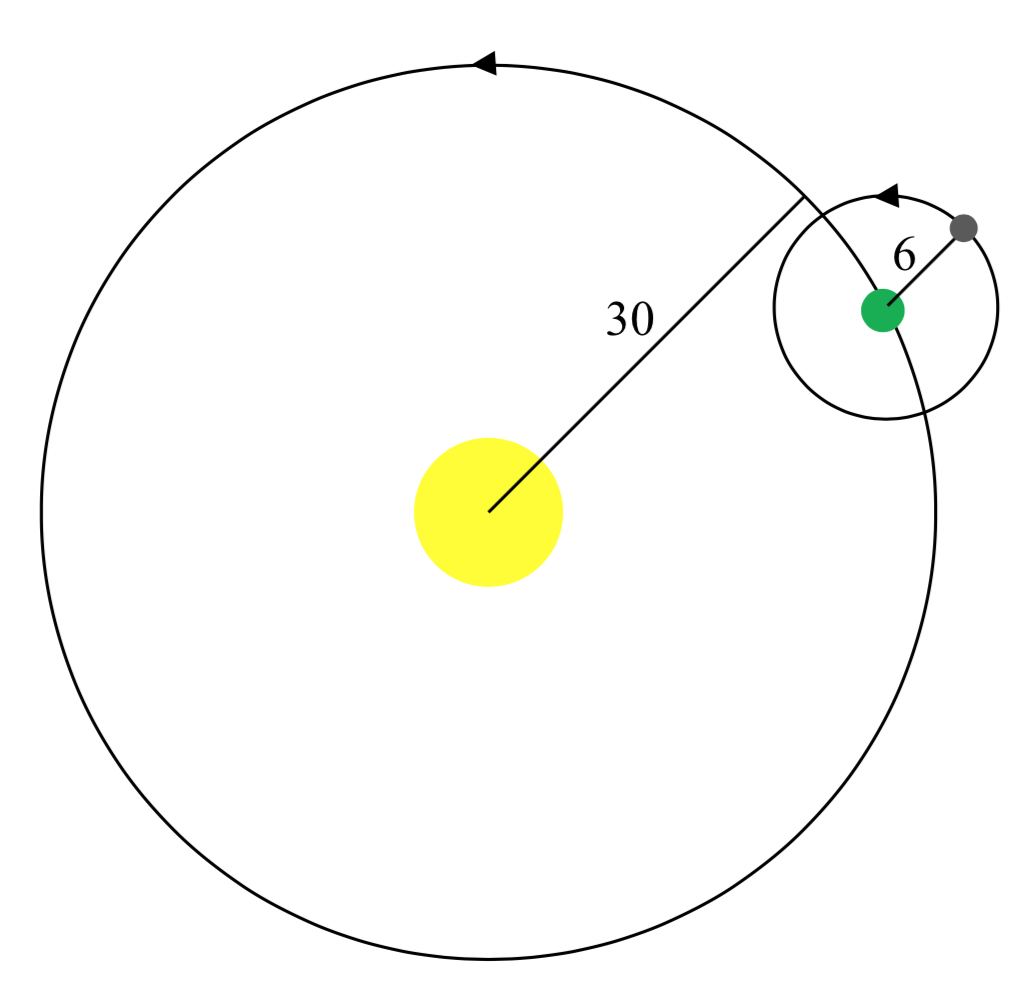
Una luna viaja alrededor de un planeta como se muestra, orbitando una vez cada 10 días. El planeta viaja alrededor de un sol como se muestra, orbitando una vez cada 100 días. Encuentra una ecuación paramétrica para la posición de la luna, relativa al centro del sol, después de\(t\) días.
Solución
Para este ejemplo, asumiremos que las órbitas son circulares, aunque en la vida real son en realidad elípticas.
Las coordenadas de un punto en un círculo siempre se pueden escribir en la forma
\[x = r\cos(\theta)\nonumber\]
\[y = r\sin(\theta)\nonumber\]
Dado que la órbita de la luna alrededor del planeta tiene un periodo de 10 días, la ecuación para la posición de la\(moon\)\(relative\)\(to\)\(the\)\(planet\)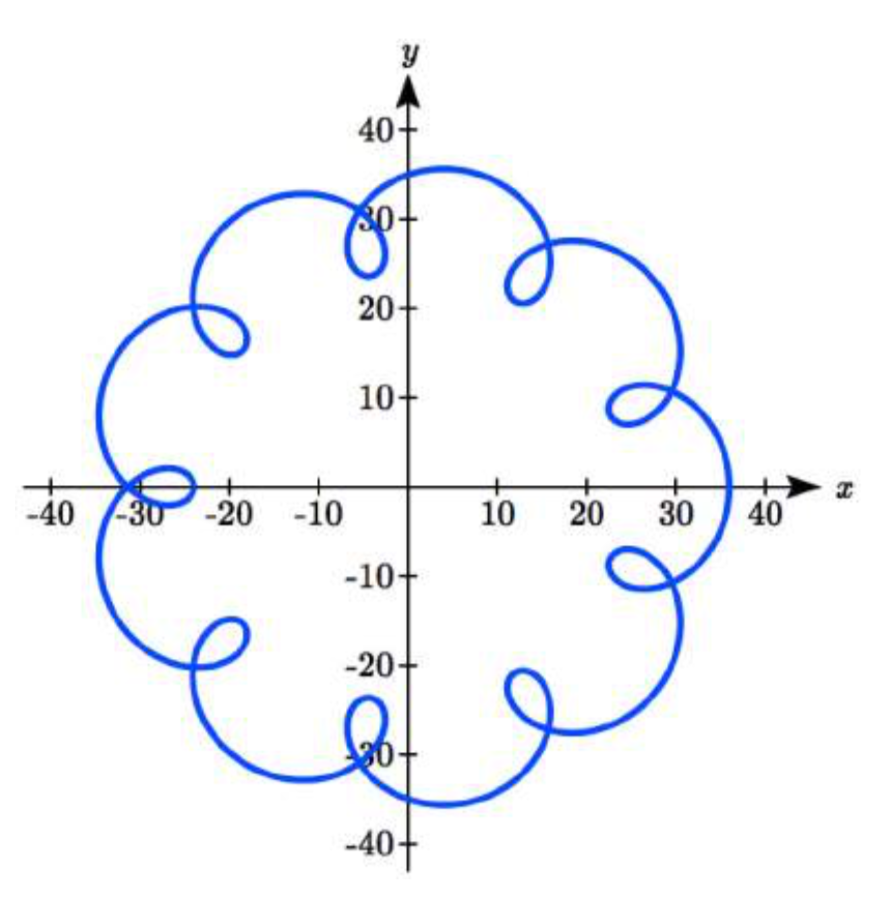 será
será
\[x(t) = 6\cos(\dfrac{2\pi}{10}t) = 6\cos(\dfrac{\pi}{5}t)\nonumber\]
\[y(t) = 6\sin(\dfrac{2\pi}{10}t) = 6\sin(\dfrac{\pi}{5}t)\nonumber\]
Con un periodo de 100 días, la ecuación para la posición del\(planet\)\(relative\)\(to\)\(the\)\(sun\) será
\[x(t) = 30\cos(\dfrac{2\pi}{100} t) = 30 \cos (\dfrac{\pi}{50} t)\nonumber\]
\[y(t) = 30\sin(\dfrac{2\pi}{100} t) = 30 \sin (\dfrac{\pi}{50} t)\nonumber\]
Combinando estos juntos, podemos encontrar la posición del\(moon\)\(relative\)\(to\)\(the\)\(sun\) como la suma de los componentes.
\[x(t) = 6\cos(\dfrac{2\pi}{5} t) = 30 \cos (\dfrac{\pi}{50} t)\nonumber\]
\[y(t) = 6\cos(\dfrac{2\pi}{5} t) = 30 \sin (\dfrac{\pi}{50} t)\nonumber\]
Aquí se muestra la gráfica resultante.
Ejercicio\(\PageIndex{4}\)
Una rueda de radio 4 se rueda alrededor del exterior de un círculo de radio 7. Encuentra una ecuación paramétrica para la posición de un punto en el límite de la rueda más pequeña. Esta forma se llama epicycloide.
- Contestar
-
El centro de la rueda pequeña gira en círculo con radio 7 + 4 = 11.
Dado que la circunferencia del círculo pequeño es\(8\pi\) y la circunferencia del círculo grande es\(22\pi\), en el tiempo que lleva rodar alrededor del círculo grande, el círculo pequeño habrá girado\(\dfrac{22\pi}{8\pi} = \dfrac{11}{4}\) rotaciones. Utilizamos esto como factor de estiramiento. La posición de un punto en el círculo pequeño será la combinación de la posición del centro de la rueda pequeña alrededor del centro de la rueda grande, y la posición del punto alrededor de la rueda pequeña:
\[x(t) = 11 \cos(t) - 4\cos(\dfrac{11}{4} t)\nonumber\]
\[y(t) = 11\sin(t) - 4\sin(\dfrac{11}{4}t)\nonumber\]
Temas Importantes de esta Sección
- Ecuaciones paramétricas
- Graficar\(x(t)\),\(y(t)\) y la\(x-y\) gráfica correspondiente Croquizar gráficas y construir una tabla de valores
- Convertir paramétrico a cartesiano
- Convertir cartesianas a paramétricas (parametrización de curvas)