
1.10: Representaciones Matriciales de Grupos
- Page ID
- 69921

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Ahora estamos listos para integrar lo que acabamos de aprender sobre las matrices con la teoría de grupos. Las operaciones de simetría en un grupo pueden ser representadas por un conjunto de matrices de transformación\(\Gamma\)\((g)\), una para cada elemento de simetría\(g\). Cada matriz individual se llama un representante de la operación de simetría correspondiente, y el conjunto completo de matrices se llama una representación matricial del grupo. Los representantes de la matriz actúan sobre alguna base elegida conjunto de funciones, y las matrices reales que componen una representación determinada dependerán de la base que se haya elegido. Entonces se dice que la representación abarca la base elegida. En los ejemplos anteriores estuvimos viendo el efecto de algunas matrices de transformación simples sobre un vector arbitrario\(\begin{pmatrix} x, y \end{pmatrix}\). La base fue, por lo tanto, un par de vectores unitarios apuntando en las\(y\) direcciones\(x\) y. En la mayoría de los ejemplos que estaremos considerando en este curso, utilizaremos conjuntos de orbitales atómicos como funciones de base para representaciones matriciales. No te preocupes demasiado si estas ideas parecen un poco abstractas en este momento —deberían aclararse en la siguiente sección cuando veamos algunos ejemplos.
Antes de continuar, debemos verificar que una representación matricial de un grupo obedezca a todas las reglas establecidas en la definición matemática formal de un grupo.
- La primera regla es que el grupo debe incluir la operación de identidad\(E\) (la operación de 'no hacer nada'). Se demostró anteriormente que la matriz representativa de la operación de identidad es simplemente la matriz de identidad. Como consecuencia, cada representación matricial incluye la matriz de identidad apropiada.
- La segunda regla es que la combinación de cualquier par de elementos también debe ser un elemento del grupo (la propiedad del grupo). Si multiplicamos dos representantes de matriz cualesquiera, deberíamos obtener una nueva matriz que sea representativa de otra operación de simetría del grupo. De hecho, los representantes de la matriz se multiplican para dar nuevos representantes exactamente de la misma manera que las operaciones de simetría se combinan de acuerdo con la tabla de multiplicación grupal. Por ejemplo, en el grupo de\(C_{3v}\) puntos, demostramos que la operación de simetría combinada\(C_3\)\(\sigma_v\) es equivalente a \(\sigma_v''\). En una representación matricial del grupo, si los representantes matriciales de\(C_3\) y \(\sigma_v\)se multiplican juntos, el resultado será el representativo de \(\sigma_v''\).
- La tercera regla establece que toda operación debe tener una inversa, que también es miembro del grupo. El efecto combinado de llevar a cabo una operación y su inversa es el mismo que la operación de identidad. Es bastante fácil demostrar que los representantes de la matriz satisfacen este criterio. Por ejemplo, la inversa de una reflexión es otra reflexión, idéntica a la primera. En términos de matriz, por lo tanto, esperaríamos que una matriz de reflexión fuera su propia inversa, y que dos matrices de reflexión idénticas multiplicadas juntas darían la matriz de identidad. Esto resulta ser cierto, y se puede verificar usando cualquiera de las matrices de reflexión en los ejemplos anteriores. El inverso de una matriz de rotación es otra matriz de rotación correspondiente a una rotación del sentido opuesto a la primera.
- La regla final establece que la regla de combinación de elementos de simetría en un grupo debe ser asociativa. Esto es automáticamente satisfecho por las reglas de multiplicación matricial.
Ejemplo: una representación matricial del grupo\(C_{3v}\) puntual (la molécula de amoníaco)
Lo primero que debemos hacer antes de poder construir una representación matricial es elegir una base. Para\(NH_3\), we will select a basis \(\begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\) that consists of the valence s orbitals on the nitrogen and the three hydrogen atoms. We need to consider what happens to this basis when it is acted on by each of the symmetry operations in the \(C_{3v}\) point group, and determine the matrices that would be required to produce the same effect. The basis set and the symmetry operations in the \(C_{3v}\) point group are summarized in the figure below.

Los efectos de las operaciones de simetría sobre nuestra base elegida son los siguientes:
\[\begin{array}{ll} E & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \\ C_3^+ & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_2, s_3, s_1 \end{pmatrix} \\ C_3^- & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_3, s_1, s_2 \end{pmatrix} \\ \sigma_v & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_1, s_3, s_2 \end{pmatrix} \\ \sigma_v' & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_2, s_1, s_3 \end{pmatrix} \\ \sigma_v'' & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \rightarrow \begin{pmatrix} s_N, s_3, s_2, s_1 \end{pmatrix} \end{array} \label{10.1}\]
Por inspección, las matrices que llevan a cabo las mismas transformaciones son:
\[\begin{array}{ll} \Gamma(E) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \\ \Gamma(C_3^+) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_2, s_3, s_1 \end{pmatrix} \\ \Gamma(C_3^-) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_3, s_1, s_2 \end{pmatrix} \\ \Gamma(\sigma_v) & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & 1 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_1, s_3, s_2 \end{pmatrix} \\ \Gamma(\sigma_v') & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} s_N, s_2, s_1, s_3 \end{pmatrix} \\ \Gamma(\sigma_v'') & \begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 1 \\ 0 & 0 & 1 & 0 \\ 0 & 1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} s_N, s_3, s_2, s_1 \end{pmatrix} \end{array} \label{10.2}\]
Estas seis matrices, por lo tanto, forman una representación para la\(C_{3v}\) point group in the \(\begin{pmatrix} s_N, s_1, s_2, s_3 \end{pmatrix}\) basis. They multiplicación conjunta de acuerdo con la tabla de multiplicación de grupos y satisfacen todos los requisitos para un grupo matemático.
Hemos escrito los vectores que representan nuestra base como vectores de fila. Esto es importante. Si las hubiéramos escrito como vectores de columna, las matrices de transformación correspondientes serían las transposiciones de las matrices anteriores, y no reproducirían la tabla de multiplicación grupal (pruébalo como ejercicio si necesitas convencerte).
Ejemplo: una representación matricial del grupo\(C_{2v}\) puntual (el radical alilo)
En este ejemplo, tomaremos como base una\(p\) orbital on each carbon atom \(\begin{pmatrix} p_1, p_2, p_3 \end{pmatrix}\).
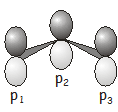
Tenga en cuenta que el\(p\) orbitals are perpendicular to the plane of the carbon atoms (this may seem obvious, but if you’re visualizing the basis incorrectly it will shortly cause you a not inconsiderable amount of confusion). The symmetry operations in the \(C_{2v}\) point group, and their effect on the three \(p\) orbitals, are as follows:
\[\begin{array}{ll} E & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \rightarrow \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \\ C_2 & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \rightarrow \begin{pmatrix} -p_3, -p_2, -p_1 \end{pmatrix} \\ \sigma_v & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \rightarrow \begin{pmatrix} -p_1, -p_2, -p_3 \end{pmatrix} \\ \sigma_v' & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \rightarrow \begin{pmatrix} p_3, p_2, p_1 \end{pmatrix} \end{array} \label{10.3}\]
Las matrices que llevan a cabo la transformación son
\[\begin{array}{ll} \Gamma(E) & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \\ \Gamma(C_2) & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \begin{pmatrix} 0 & 0 & -1 \\ 0 & -1 & 0 \\ -1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} -p_3, -p_2, -p_1 \end{pmatrix} \\ \Gamma(\sigma_v) & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \begin{pmatrix} -1 & 0 & 0 \\ 0 & -1 & 0 \\ 0 & 0 & -1 \end{pmatrix} = \begin{pmatrix} -p_1, -p_2, -p_3 \end{pmatrix} \\ \Gamma(\sigma_v') & \begin{pmatrix} p_1, p_2, p_3 \end{pmatrix} \begin{pmatrix} 0 & 0 & 1 \\ 0 & 1 & 0 \\ 1 & 0 & 0 \end{pmatrix} = \begin{pmatrix} p_3, p_2, p_1 \end{pmatrix} \end{array} \label{10.4}\]