
6.4: Circuitos de control del motor
- Page ID
- 154469

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Los contactos de enclavamiento instalados en el circuito de control del motor de la sección anterior funcionan bien, pero el motor funcionará solo mientras cada interruptor de botón esté presionado. Si quisiéramos mantener el motor funcionando incluso después de que el operador le quitara la mano del interruptor (es) de control, podríamos cambiar el circuito de un par de formas diferentes: podríamos reemplazar los interruptores de botón pulsador por interruptores de palanca, o podríamos agregar algo más de lógica de relé para “bloquear” el circuito de control con un solo, accionamiento momentáneo de cualquiera de los interruptores. Veamos cómo se implementa el segundo enfoque ya que es de uso común en la industria:
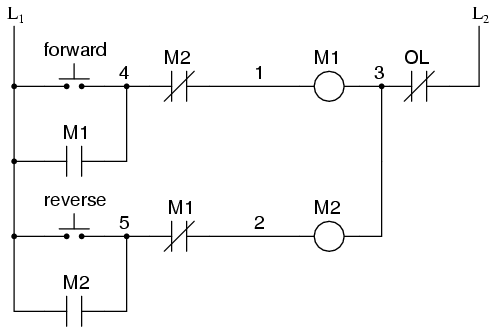
Cuando se acciona el pulsador “Adelante”, M 1 se energizará, cerrando el contacto auxiliar normalmente abierto en paralelo con ese interruptor. Cuando se suelta el pulsador, el contacto auxiliar cerrado M 1 mantendrá corriente a la bobina de M 1, bloqueando así el circuito “Forward” en el estado “on”. El mismo tipo de cosas sucederán cuando se presione el pulsador “Reverse”. Estos contactos auxiliares paralelos a veces se denominan contactos de sellado, la palabra “sello” significa esencialmente lo mismo que la palabra pestillo.
Sin embargo, esto crea un nuevo problema: ¡cómo detener el motor! Como el circuito existe en este momento, el motor funcionará hacia adelante o hacia atrás una vez que se presione el interruptor de botón correspondiente y continuará funcionando mientras haya alimentación. Para detener cualquiera de los circuitos (hacia adelante o hacia atrás), requerimos algunos medios para que el operador interrumpa la alimentación a los contactores del motor. Llamaremos a este nuevo switch, Stop:
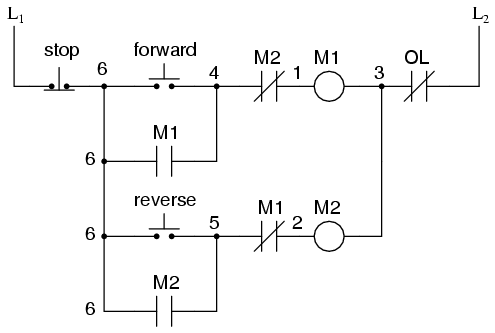
Ahora, si los circuitos hacia adelante o hacia atrás están bloqueados, pueden ser “desenganchados” presionando momentáneamente el botón “Stop”, que abrirá el circuito directo o inverso, desenergizando el contactor energizado y devolviendo el contacto de sellado a su estado normal (abierto). El interruptor “Stop”, que tiene contactos normalmente cerrados, conducirá la alimentación a los circuitos hacia adelante o hacia atrás cuando se suelta.
Hasta el momento, tan bien. Consideremos otro aspecto práctico de nuestro esquema de control de motores antes de dejar de agregarlo. Si nuestro hipotético motor giraba una carga mecánica con mucho impulso, como un ventilador de aire grande, el motor podría continuar bajando durante una cantidad sustancial de tiempo después de que se hubiera pulsado el botón de parada. Esto podría ser problemático si un operador intentara invertir la dirección del motor sin esperar a que el ventilador dejara de girar. Si el ventilador seguía avanzando hacia adelante y se presionaba el pulsador “Reverse”, el motor lucharía por superar esa inercia del ventilador grande ya que intentaba comenzar a girar en reversa, extrayendo una corriente excesiva y potencialmente reduciendo la vida útil del motor, los mecanismos de accionamiento y el ventilador. Lo que nos gustaría tener es algún tipo de función de retardo de tiempo en este sistema de control de motor para evitar que ocurra un arranque tan prematuro.
Comencemos agregando un par de bobinas de relé de retardo de tiempo, una en paralelo con cada bobina del contactor del motor. Si utilizamos contactos que retrasan el regreso a su estado normal, estos relés nos proporcionarán una “memoria” de en qué dirección se alimentó por última vez el motor en girar. Lo que queremos que haga cada contacto de retardo de tiempo es abrir la pata del interruptor de arranque del circuito de rotación opuesto durante varios segundos, mientras que el ventilador se detiene.
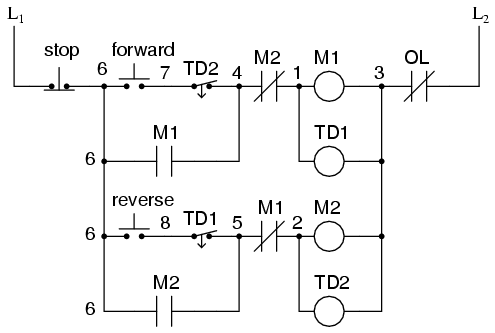
Si el motor ha estado funcionando en dirección hacia adelante, tanto M 1 como TD 1 habrán sido energizados. Siendo este el caso, el contacto normalmente cerrado y temporizado del TD 1 entre los cables 8 y 5 se habrá abierto inmediatamente en el momento en que TD 1 se energizó. Cuando se presiona el botón de parada, el contacto TD 1 espera la cantidad de tiempo especificada antes de regresar a su estado normalmente cerrado, manteniendo así abierto el circuito del botón inverso durante el tiempo para que M 2 no pueda ser energizado. Cuando TD 1 se agota, el contacto se cerrará y el circuito permitirá que M 2 se active si se presiona el botón de marcha atrás. De la misma manera, TD 2 evitará que el pulsador “Adelante” active a M1 hasta que el retraso de tiempo prescrito después de que M 2 (y TD 2) hayan sido desenergizados.
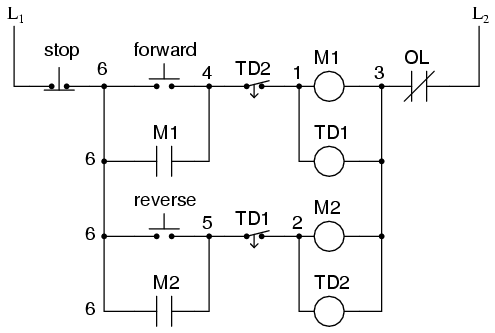
El observador cuidadoso notará que las funciones de enclavamiento temporal de TD 1 y TD 2 hacen que los contactos de enclavamiento M 1 y M2 sean redundantes. Podemos deshacernos de los contactos auxiliares M 1 y M2 para enclavamientos y simplemente usar los contactos TD 1 y TD 2, ya que se abren inmediatamente cuando sus respectivas bobinas de relé están energizadas, de esta manera “bloqueando” un contactor si el otro está energizado. Cada relé de retardo de tiempo servirá para un doble propósito: evitar que el otro contactor se active mientras el motor está funcionando y evitar que el mismo contactor se energice hasta un tiempo prescrito después del apagado del motor. El circuito resultante tiene la ventaja de ser más simple que el ejemplo anterior:
Revisar
- Las bobinas del contactor del motor (o “arrancador”) se designan típicamente con la letra “M” en los diagramas lógicos de escalera.
- El funcionamiento continuo del motor con un interruptor de “arranque” momentáneo es posible si un contacto de “sellado” normalmente abierto desde el contactor está conectado en paralelo con el interruptor de arranque de modo que una vez que el contactor está energizado, mantenga la energía consigo mismo y se mantenga “enganchado”.
- Los relés de retardo de tiempo se usan comúnmente en circuitos de control de motores grandes para evitar que el motor se arranque (o se invierta) hasta que haya transcurrido una cierta cantidad de tiempo desde un evento.