
6.3: Circuitos permisivos y de enclavamiento
- Page ID
- 154477

Una aplicación práctica de la lógica de conmutación y relé es en sistemas de control donde se deben cumplir varias condiciones de proceso antes de que se permita que se inicie un equipo. Un buen ejemplo de esto es el control de quemadores para grandes hornos de combustión. Para que los quemadores en un horno grande se inicien de manera segura, el sistema de control solicita “permiso” de varios interruptores de proceso, incluyendo presión de combustible alta y baja, verificación del flujo del ventilador de aire, posición del amortiguador de la pila de escape, posición de la puerta de acceso, etc. cada condición del proceso se llama permisiva, y cada contacto permisivo del interruptor está cableado en serie, de modo que si alguno de ellos detecta una condición insegura, el circuito se abrirá:
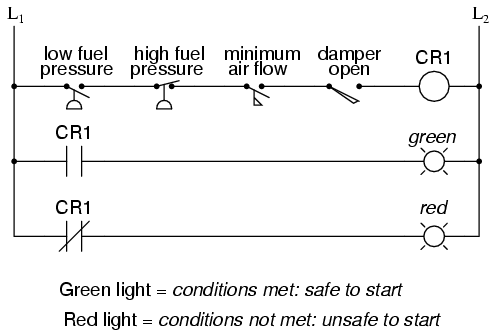
Si se cumplen todas las condiciones permisivas, CR 1 se energizará y se encenderá la lámpara verde. En la vida real, más que solo se energizaría una lámpara verde: por lo general, se colocaría un relé de control o solenoide de válvula de combustible en ese peldaño del circuito para ser energizado cuando todos los contactos permisivos fueran “buenos”: es decir, todos cerrados. Si no se cumple alguna de las condiciones permisivas, la serie de contactos del interruptor se romperá, el CR 2 se desenergizará y la lámpara roja se encenderá.
Tenga en cuenta que el contacto de alta presión de combustible está normalmente cerrado. Esto se debe a que queremos que se abra el contacto del interruptor si la presión del combustible sube demasiado. Dado que la condición “normal” de cualquier presostato es cuando se le está aplicando presión cero (baja), y queremos que este interruptor se abra con presión excesiva (alta), debemos elegir un interruptor que esté cerrado en su estado normal.
Otra aplicación práctica de la lógica de relés es en sistemas de control donde queremos asegurar que dos eventos incompatibles no puedan ocurrir al mismo tiempo. Un ejemplo de esto es en el control de motor reversible, donde dos contactores de motor están conectados para cambiar la polaridad (o secuencia de fase) a un motor eléctrico, y no queremos que los contactores de avance y retroceso se activen simultáneamente:
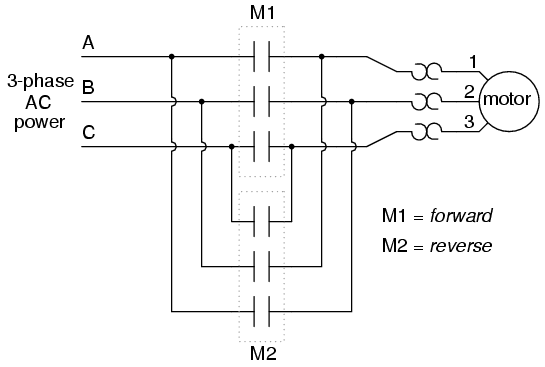
Cuando se activa el contactor M1, las 3 fases (A, B y C) se conectan directamente a los terminales 1, 2 y 3 del motor, respectivamente. Sin embargo, cuando el contactor M2 está energizado, las fases A y B se invierten, A va al terminal 2 del motor y B va al terminal 1 del motor. Esta inversión de los cables de fase da como resultado que el motor gire en la dirección opuesta. Examinemos el circuito de control para estos dos contactores:
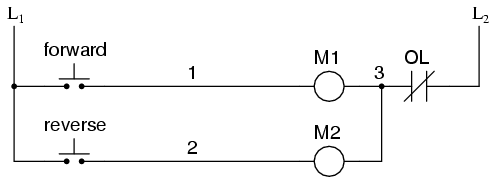
Tome nota del contacto “OL” normalmente cerrado, que es el contacto de sobrecarga térmica activado por los elementos “calefactores” cableados en serie con cada fase del motor de CA. Si los calentadores se calientan demasiado, el contacto cambiará de su estado normal (cerrado) a estar abierto, lo que evitará que cualquiera de los contactores se energice.
Este sistema de control funcionará bien, siempre y cuando nadie presione ambos botones al mismo tiempo. Si alguien hiciera eso, las fases A y B se cortocircuitarían juntas en virtud de que el contactor M 1 envía las fases A y B directamente al motor y el contactor M2 las invierte; la fase A estaría cortocircuitada a la fase B y viceversa. Obviamente, ¡este es un mal diseño de sistema de control!
Para evitar que esto ocurra, podemos diseñar el circuito para que la energización de un contactor impida la energización del otro. Esto se llama enclavamiento, y se logra mediante el uso de contactos auxiliares en cada contactor, como tal:
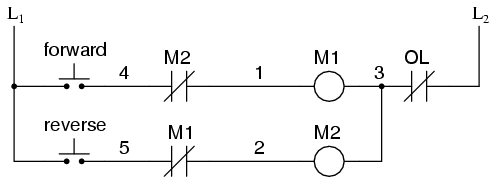
Ahora, cuando M 1 está energizado, el contacto auxiliar normalmente cerrado en el segundo peldaño estará abierto, evitando así que M 2 sea energizado, incluso si se acciona el pulsador “Reverse”. Asimismo, se evita la energización de M 1 cuando M 2 está energizado. Observe también cómo se agregaron números de cable adicionales (4 y 5) para reflejar los cambios de cableado.
Cabe señalar que esta no es la única forma de enclavar contactores para evitar una condición de cortocircuito. Algunos contactores vienen equipados con la opción de un enclavamiento mecánico: una palanca que une las armaduras de dos contactores entre sí para que se les impida físicamente el cierre simultáneo. Para mayor seguridad, aún se pueden usar enclavamientos eléctricos, y debido a la simplicidad del circuito no hay una buena razón para no emplearlos además de los enclavamientos mecánicos.
- REVISIÓN:
- Los contactos de conmutación instalados en un peldaño de lógica de escalera diseñado para interrumpir un circuito si no se cumplen ciertas condiciones físicas se denominan contactos permisivos, porque el sistema requiere permiso de estas entradas para activarse.
- Los contactos de interruptor diseñados para evitar que un sistema de control realice dos acciones incompatibles a la vez (como alimentar un motor eléctrico hacia adelante y hacia atrás simultáneamente) se denominan enclavamientos.