
10.13: Conversiones Δ-Y e Y-Δ
- Page ID
- 155440

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
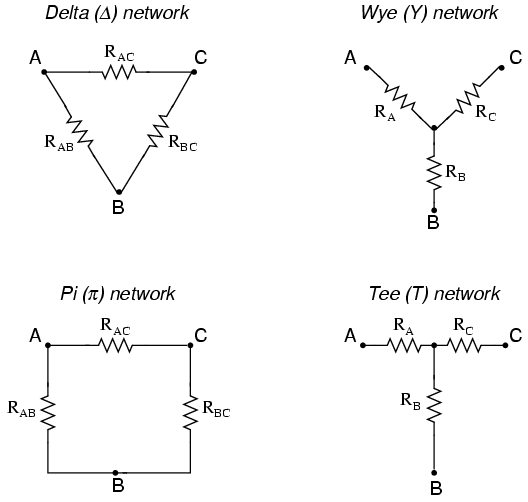
En muchas aplicaciones de circuitos, encontramos componentes conectados entre sí en una de dos formas para formar una red de tres terminales: la configuración “Delta” o Δ (también conocida como “Pi” o π), y la configuración “Y” (también conocida como la “T”).
Es posible calcular los valores adecuados de las resistencias necesarias para formar un tipo de red (Δ o Y) que se comporta de manera idéntica a la otra clase, tal y como se analiza solo a partir de las conexiones terminales. Es decir, si tuviéramos dos redes de resistencias separadas, una Δ y una Y, cada una con sus resistencias ocultas a la vista, sin nada más que los tres terminales (A, B y C) expuestos para pruebas, las resistencias podrían dimensionarse para las dos redes de manera que no hubiera forma de determinar eléctricamente una red aparte de la otro. En otras palabras, las redes δ e Y equivalentes se comportan de manera idéntica.
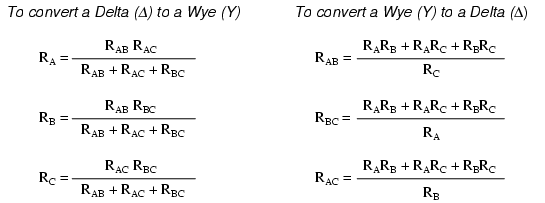
Existen varias ecuaciones que se utilizan para convertir una red a otra:
Las redes Δ e Y se ven con frecuencia en sistemas de alimentación de CA trifásicos (tema tratado en el volumen II de esta serie de libros), pero incluso entonces suelen ser redes equilibradas (todas las resistencias son iguales en valor) y la conversión de una a otra no necesita implicar cálculos tan complejos. ¿Cuándo necesitaría alguna vez el técnico promedio usar estas ecuaciones?
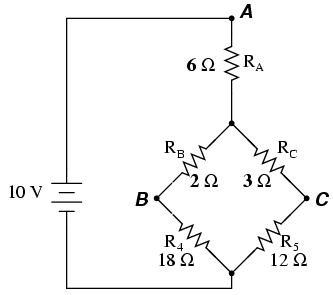
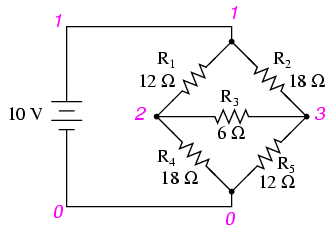
Una aplicación principal para la conversión Δ-Y está en la solución de circuitos de puente desequilibrados, como el siguiente:
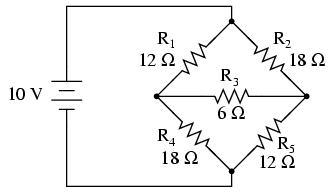
Solución de este circuito con análisis de Corriente de Rama o Corriente de Malla está bastante involucrada, y ni el Millman ni los Teoremas de Superposición son de ninguna ayuda, ya que solo hay una fuente de energía. Podríamos usar el Teorema de Thevenin o Norton, tratando a R 3 como nuestra carga, pero ¿qué divertido sería eso?
Si tratáramos las resistencias R1, R2 y R3 como conectadas en una configuración Δ (R ab, R ac y R bc, respectivamente) y generar una red Y equivalente para reemplazarlas, podríamos convertir este circuito puente en una serie (más simple) /circuito combinado paralelo:
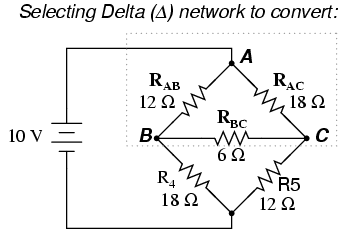
Después de la conversión Δ-Y.

Si realizamos nuestros cálculos correctamente, los voltajes entre los puntos A, B y C serán los mismos en el circuito convertido que en el circuito original, y podremos transferir esos valores de nuevo a la configuración original del puente.
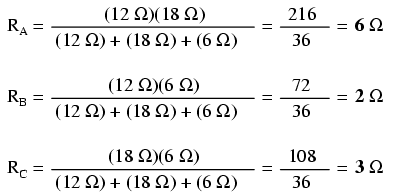
Las resistencias R 4 y R 5, por supuesto, siguen siendo las mismas a 18 Ω y 12 Ω, respectivamente. Analizando el circuito ahora como una combinación serie/paralelo, llegamos a las siguientes cifras:
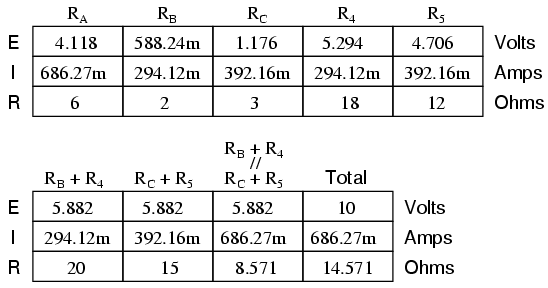
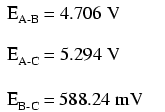
Debemos usar las cifras de caídas de voltaje de la tabla anterior para determinar las tensiones entre los puntos A, B y C, viendo cómo se suman (o restan, como es el caso de la tensión entre los puntos B y C):
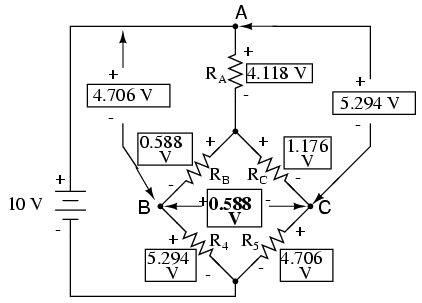
Ahora que conocemos estos voltajes, podemos transferirlos a los mismos puntos A, B y C en el circuito puente original:
Las caídas de voltaje a través de R 4 y R 5, por supuesto, son exactamente las mismas que fueron en el circuito convertido.
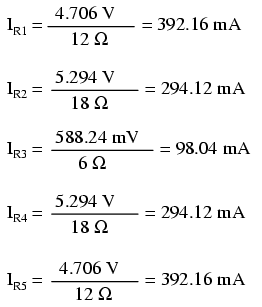
En este punto, podríamos tomar estos voltajes y determinar las corrientes de resistencia mediante el uso repetido de la Ley de Ohm (I=E/R):
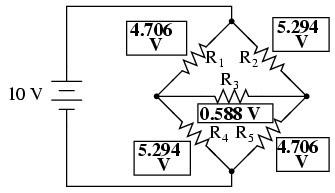
Una simulación rápida con SPICE servirá para verificar nuestro trabajo:
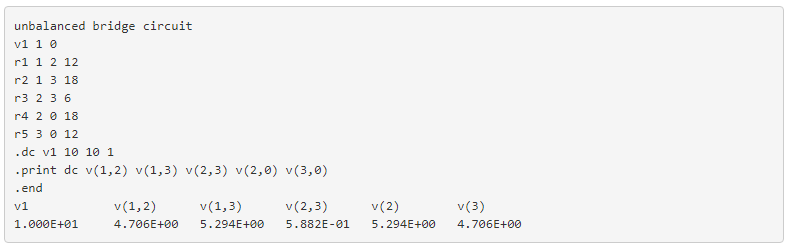
Las cifras de voltaje, leídas de izquierda a derecha, representan caídas de voltaje a través de las cinco resistencias respectivas, R1 a R 5. También podría haber mostrado corrientes, pero como eso habría requerido la inserción de fuentes de voltaje “ficticias” en la netlist SPICE, y como estamos interesados principalmente en validar las ecuaciones de conversión Δ-Y y no la Ley de Ohm, esto será suficiente.
Revisar
- Las redes “Delta” (Δ) también se conocen como redes “Pi” (π).
- Las redes “Y” también se conocen como redes “T”.
- Las redes Δ e Y se pueden convertir a sus contrapartes equivalentes con las ecuaciones de resistencia adecuadas. Por “equivalente”, quiero decir que las dos redes serán eléctricamente idénticas según se mide desde los tres terminales (A, B y C).
- Un circuito puente se puede simplificar a un circuito serie/paralelo convirtiendo la mitad de él de una red Δ a una red Y. Después de que se hayan resuelto las caídas de voltaje entre los tres puntos de conexión originales (A, B y C), esos voltajes se pueden transferir de nuevo al circuito puente original, a través de esos mismos puntos equivalentes.