
12.19: Locomoción
- Page ID
- 107876
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)
¿Qué permite que este guepardo sea tan rápido?
¿Crees que tiene algo que ver con la colocación de las extremidades? Bueno, lo hace. Mira de cerca el cuerpo del guepardo. ¿Puedes describir por qué es tan rápido?
Vida Social en Mamíferos
Muchos mamíferos viven en grupos sociales. La vida social evolucionó porque es adaptativa. Considera estos dos ejemplos:
- Herbívoros como cebras y elefantes viven en rebaños. Los adultos en el rebaño rodean y protegen a los jóvenes, que son los más vulnerables a los depredadores.
- Los leones viven en grupos sociales llamados orgullo. Las hembras adultas en el orgullo cazan cooperativamente, lo que es más eficiente que cazar solo. Después comparten la comida con el resto del orgullo. Por su parte, los machos adultos defienden el territorio del orgullo de otros depredadores.
Locomoción en Mamíferos
Los mamíferos son conocidos por las muchas formas en que pueden moverse. Generalmente, sus extremidades son muy móviles. A menudo, se pueden rotar. Muchos mamíferos también son conocidos por su velocidad. El animal terrestre más rápido es un mamífero depredador. ¿Puedes adivinar qué es? Corre a velocidades de hasta 112 kilómetros (70 millas) por hora, el guepardo gana sin duda. Además, las extremidades de los mamíferos les permiten sostener su cuerpo por encima del suelo. Eso se debe a que las extremidades están unidas debajo del cuerpo, más que a los lados como en los reptiles (ver Figura abajo).
 Posiciones de las extremidades en reptiles y mamíferos. Las extensas extremidades de un reptil lo mantienen bajo el suelo. Un mamífero tiene una postura más erguida.
Posiciones de las extremidades en reptiles y mamíferos. Las extensas extremidades de un reptil lo mantienen bajo el suelo. Un mamífero tiene una postura más erguida. Los mamíferos pueden tener extremidades que están especializadas para una forma particular de moverse. Pueden estar especializados para correr, saltar, escalar, volar o nadar. Los mamíferos con estos diferentes modos de locomoción se muestran en la Figura a continuación.
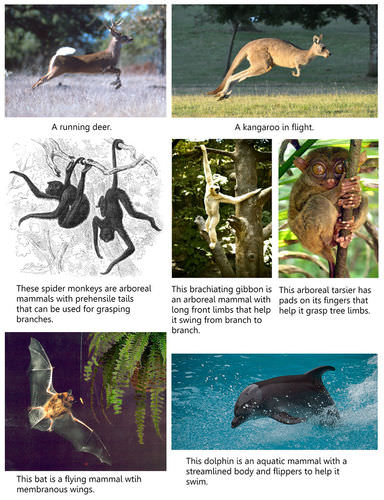 Locomoción Mamíferos. Los mamíferos tienen muchos modos diferentes de locomoción.
Locomoción Mamíferos. Los mamíferos tienen muchos modos diferentes de locomoción. El venado en la Figura anterior está especializado para correr. ¿Por qué? Tiene patas largas y pezuñas duras. ¿Ves por qué los demás animales de la figura están especializados por sus hábitats particulares? Observe cómo los animales arbóreos o que viven en árboles tienen una variedad de especializaciones diferentes para moverse en árboles. Por ejemplo, pueden tener:
- Una cola prensil, o agarrada. Esto se utiliza para escalar y colgar de ramas.
- Brazos muy largos para balancearse de rama a rama. Esta forma de moverse se llama braquiación.
- Almohadillas pegajosas en los dedos. Las almohadillas les ayudan a aferrarse a los troncos y ramas de los árboles.
Resumen
- Los mamíferos viven en grupos sociales, los cuales son un rasgo benéfico adaptativo.
- Los mamíferos tienen muchas formas de moverse y pueden moverse muy rápidamente.
Revisar
- Nombrar cinco tipos de movimiento que se encuentran en los mamíferos?
- Cierto mamífero tiene extremidades anteriores muy largas. ¿Qué sugiere eso sobre dónde vive el animal y cómo se mueve?
- Qué tipo de movimiento se encuentra en la pregunta anterior.
- ¿Cuál es el propósito de una cola prensil?
| Imagen | Referencia | Atribuciones |
|
[Figura 1] | Licencia: CC BY-NC |
|
[Figura 2] | Crédito: Lagarto: Benny Trapp; Suricata: Ken Banks Fuente: Lagarto: Commons.wikimedia.org/wiki/Archivo:Benny_Trapp_Podarcis_Milensis.jpg; Surikat: Commons.wikimedia.org/wiki/Archivo:Suricata_Suricatta_-Durrell_WildLife_Park; _Jersey; _UK-8.jpg Licencia: Lagarto: CC BY 3.0; Suricata: CC BY 2.0 |
 |
[Figura 3] | Crédito: Ciervo: Scott Bauer/Agricultural Research Society; Canguro: Chris Samuel; Mono araña: Gustav Mützel; Gibbon: Troy B Thompson; Tarsier: Roberto Verzo; Murciélago: F Chanut; Delfín: Administración Nacional Oceánica y Atmosférica de Estados Unidos Fuente: Ciervo: Commons.wikimedia.org/wiki/Archivo:Deer_Running.jpg; Canguro: http://www.flickr.com/photos/chrissamuel/5366854530/; Mono araña: commons.wikimedia.org/wiki/Archivo:Klammeraffe-dibujo.jpg; Gibbon: es.wikipedia.org/wiki/Archivo:Brachiating_Gibbon_%28Some_Rights_Reserved%29.jpg; Tarsier: www.flickr.com/photos/verzo/1009489040/in/photostream/; Murciélago: commons.wikimedia.org/wiki/Archivo:Bat_Flying_at_night.png; Delfín: Commons.wikimedia.org/wiki/Archivo:SpottedDolphin1.jpg Licencia: (Ciervo) Dominio público; (Canguro) CC BY 2.0; (Mono araña) Público Dominio; (Gibbon) CC BY 3.0; (Tarsier) CC BY 2.0; (Bat) CC BY 2.5; (Dolphin) Dominio público |